
Реферат за темою випускної роботи
Зміст
- Вступ
- 1. Актуальність теми
- 2. Мета і задачі дослідження та заплановані результати
- 3. Огляд досліджень та розробок
- 3.1 Огляд міжнародних джерел
- 3.2 Огляд національних джерел
- 3.3 Огляд локальних джерел
- 4. Розробка пристрою
- Висновки
- Перелік посилань
Вступ
У середині 20-го століття технічний прогрес зробив стрибок у розвитку комп'ютерних технологій. Після цього комп'ютерні технології почали розвиватися по експоненті. Наочно даний факт описує закон Мура [1]. До середини 20-го століття в науковій фантастиці сформувалося велика кількість творів, що описують вже не комп'ютери, а робототехніку: формуються закони робототехніки [2], передбачуваний зовнішній вигляд і можливості, що перевершують людські. На хвилі розвитку технічного прогресу і комп'ютерних технологій зародилася робототехніка. На даний момент ми можемо спостерігати все більше впровадження роботизованих пристроїв в навколишньому світі, а в не далекому майбутньому можливо ми побачимо безпосередньо роботів, які живуть з нами пліч-о-пліч і допомагають нам поліпшити наше життя. Але для того, щоб роботи вписалися в наше життя їх необхідно оснастити системами орієнтування в просторі.
1. Актуальність теми
При взаємодії роботизованої техніки з навколишніми об'єктами виникає необхідність в системах орієнтування в просторі. Так само ці системи необхідні в тих випадках, коли оператор будь-якої машини, що рухається, або пристрою не може достовірно оцінювати переміщення керованого об'єкта в просторі і його взаємодію з іншими об'єктами. З розвитком науково-технічного прогресу ця проблема стає все більш актуальною. Системи орієнтування в просторі все більше проникають в наше повсякденне життя: від мобільних телефонів (датчики наближення, GPS, акселерометр і багато іншого) до автомобілів (GPS, парктронік і т. д). Впровадження даних систем в аерокосмічну галузь є невід'ємною частиною прогресу в цій області. Отже, дослідження і розробка систем орієнтування в просторі є актуальною.
2. Мета і задачі дослідження та заплановані результати
Метою роботи є дослідження і розробка систем орієнтування робототехніки в просторі.
Необхідно розробити систему, що забезпечує автономного робота необхідною інформацією для його пересування в просторі. Дана система повинна бути сконструйована з урахуванням наступних вимог:
1) мінімальна вартість;
2) проста в збірці;
3) легко впроваджується в роботизовані пристрої;
4) універсальна для різних типів роботів.
Ще одним завданням є розробка системи, яка забезпечить оператору можливість управляти роботом у разі, якщо виникла ситуація, коли робот не може впоратися з поставленим завданням або виникла аварійна ситуація.
3. Огляд досліджень та розробок
На даний час існує безліч досліджень і розробок в області орієнтування робототехніки в просторі. Щодня розробляються принципово нові системи або компонуються вже наявні для отримання кращого результату. Більшість розробок робиться в наукових центрах і застосовуються в комерційних структурах. Отже, не вся інформація по новітнім розробкам знаходиться у вільному доступі з повним описом. Це ускладнює пошук інформації по темі, що вивчається.
3.1 Огляд міжнародних джерел
Міжнародні джерела в області систем орієнтування в просторі носять суто інформаційний характер. Отже, з них можна запозичити ідеї для розробок даних систем.
Публікація Edward Red "Robotics Overview". Дана стаття містить велику кількість інформації як про сам роботобудуванні, так і про системи, за допомогою яких роботи можуть взаємодіяти з навколишніми об'єктами [3].
Публікація Samuel Bouchard "7 Types of Industrial Robot Sensors". Дана стаття містить інформацію про типи сенсорів для роботів, які використовуються на виробництві[4].
3.2 Огляд національних джерел
Національні джерела є більш інформативними в порівнянні з зарубіжними. Величезна кількість проектів і напрацювань знаходиться у відкритому доступі і мають повний опис. Також є велика кількість наукових публікацій з робототехніки.
Публікація Андрій Антонов „Опис руху мобільного робота“. У даній статті розглянуті моделі опису рухів роботів [5].
Публікація Олег Евсегнеев „Популярна робототехніка / Сенсор“. Стаття описує різні види сенсорів / датчиків для взаємодії робототехніки з навколишнім світом [6].
Публікація „Інфрачервоний датчик відстані“ на сайті home.roboticlab. Стаття описує принцип роботи інфрачервоних датчиків і як застосовувати ці датчики для вимірювання відстані [7].
3.3 Огляд локальних джерел
В рамках Донецького національного технічного університету (ДонНТУ) робіт в області „Дослідження і розробка систем орієнтування робототехніки в просторі“ знайдено не було, але є стаття, яка пов'язана з даною темою.
Публікація Діденко Г.С. „Роботизована система з візуальним спостереженням“. Матеріали Міжнародної науково-технічна конференції студентів, аспірантів і молодих вчених „Інформаційні управляючі системи та комп'ютерний моніторинг 2014“ [8].
4. Розробка пристрою
Розробку пристрою можна розділити на дві частини: апаратну і програмну.
Апаратна частина
Розробка системи орієнтування в просторі виконана на платформі ArduinoUno (рис.1). Arduino Uno контролер побудований на ATmega328 [9]. Платформа має 14 цифрових входів / виходів (шість з яких можуть використовуватися як виходи ШІМ), шість аналогових входів, кварцовий генератор 16 МГц, роз'єм USB, силовий роз'єм, роз'єм ICSP і кнопку перезавантаження. Для роботи необхідно підключити платформу до комп'ютера за допомогою кабелю USB, або подати живлення за допомогою адаптера AC / DC або батареї [10].
Платформа програмується за допомогою програмного забезпечення Arduino. Мова програмування пристроїв Arduino заснований на C / C ++ [11].
Для програмування мікроконтролера використовується середовище розробки Arduino 1.0.5. Мікроконтролер ATmega328 поставляється з вбудованим завантажувачем, що полегшує запис нових програм без використання зовнішніх программаторов. Пристрій працює автономно – без втручання операційної системи або користувача, живлення пристрою автономне від акумулятора.
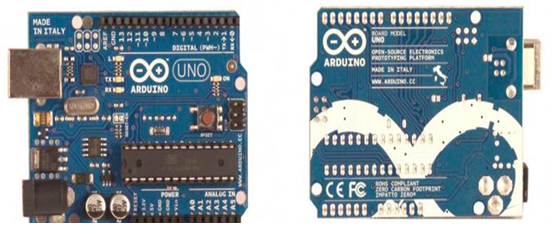
Рисунок 1 – Зовнішній вигляд ArduinoUno
Для вимірювання відстані до об'єктів будемо використовувати ультразвуковий датчик вимірювання відстані HC-SR04 [12]. Сенсор далекоміра працює за принципом сонара, а точніше – посилає ультразвуковий пучок і по затримці відбитого від об'єкта сигналу визначає відстань до цілі (рис.2). Оскільки в основі роботи пристрою використовується ультразвук, сонар погано підходить для визначення відстані до звукопоглинальних об'єктів. Поверхня об'єкта повинна бути рівною і гладкою для ідеального виміру відстані.
Рисунок 2 – Принцип роботи ультразвукового далекоміра HC-SR04
(анімація: 6 кадрів, 6 циклів повторення, 140 кілобайт)
Особливості ультразвукового далекоміраHC-SR04:
1) простота у використанні і 4-х контактне підключення;
2) діапазон виміру: від 2 до 400 см;
3) точність вимірювання: погрішність 1 см (при максимальній дальності погрішність 3 см);
4) кут вимірювання: 15 градусів (рис. 3);
5) ультразвуковий діапазон роботи на частоті 40 кГц;
6) робоча напруга 4,8 до 5,5 В (± 0.2В макс.);
7) діапазон робочих температур: 0 до 60 градусів за Цельсієм (погрішність 10%).
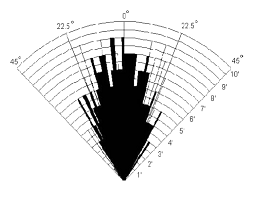
Рисунок 3 – Діаграма залежності кута вимірювання і достовірності отриманих даних
Для визначення положення робота в просторі будемо використовувати модуль GY-531 [13]. Мікросхема MPU6050 містить акселерометр, гіроскоп і температурний сенсор. MPU6050 є головним елементом модуля GY-531 (рис.4). Крім цієї мікросхеми на платі модуля розташоване необхідне обв'язування MPU6050, в тому числі підтягує резистори інтерфейсу I2C, а також стабілізатор напруги на 3,3 В з малим падінням напруги (при живленні в 3,3 В на виході стабілізатора буде 3 В) з фільтруючими конденсаторами . Також на платі є SMD світлодіод з обмежуючим резистором, що виконують функцію індикації напруги живлення. Датчики гіроскопа і акселерометра виготовлені як MEMS (мікроелектромеханічна система) - зовнішній вплив на датчик спочатку змінює стан механічної частини, потім зміна стану механічної частини призводить до зміни сигналу електричної частини. Одним словом, в одному корпусі зібрано не тільки електроніка, а й механіка. У мікросхемі MPU6050 міститься відразу два MEMS датчика, виробник стверджує, що їх взаємний вплив один на одного зведено до мінімуму.

Рисунок 4 – Зовнішній вигляд GY-531
Система, яка розроблена на базі модуля GY-531, повинна визначати кут підйому або спуску, що рухається, і в залежності від цього генерувати сигнали для збільшення / зменшення напруги, що подається на двигуни. Якщо об'єкт долає підйом, система визначає кут підйому і збільшує напругу, що подається на двигуни, для того, щоб не втратити швидкість руху. Якщо об'єкт долає спуск, система визначає кут спуску і зменшує напругу на двигуни, для того, щоб запобігти неконтрольованому розгін об'єкта.
Слід зазначити, що в даному проекті використовувався акселерометр і гіроскоп одночасно, щоб підвищити точність отриманих даних. Це обумовлено різною специфікою роботи акселерометра і гіроскопа, а також параметрами, що ними визначаються.
Далі необхідно розробити систему для управління двигуном. У даній системі двигун буде управляти платформою за допомогою мікросхеми драйвера двигунів L293D. Драйвер двигуна – це такий пристрій, який перетворює сигнали малої потужності в струми, достатній для управління моторами. L293D містить відразу два драйвера для управління електродвигунами невеликої потужності (чотири незалежні канали, які об'єднані в дві пари) і має дві пари входів для керуючих сигналів та дві пари виходів для підключення електромоторів. Крім того, у L293D є два входи для включення кожного з драйверів. Ці входи використовуються для управління швидкістю обертання електромоторів за допомогою ШІМ.
L293D забезпечує поділ електроживлення для мікросхеми і для керованих нею двигунів, що дозволяє підключити електродвигуни з великим напругою живлення, ніж у мікросхемі. Поділ електроживлення мікросхем і електродвигунів може бути також необхідним для зменшення перешкод, які викликані перепадами напруги і пов'язані з роботою моторів. Система управління двигуном (рис.5).
Характеристики мікросхеми L293D:
1) напруга живлення двигунів (Vs) – 4,5...36V;
2) напруга живлення мікросхеми (Vss) – 5V;
3) допустимий струм навантаження – 600mA (на кожен канал);
4) піковий (максимальний) струм на виході – 1,2A (на кожен канал);
5) логічний "0" вхідної напруги – до 1,5V;
6) логічна "1" вхідної напруги – 2,3...7V;
7) швидкість перемикань до 5 kHz;
8) захист від перегріву.
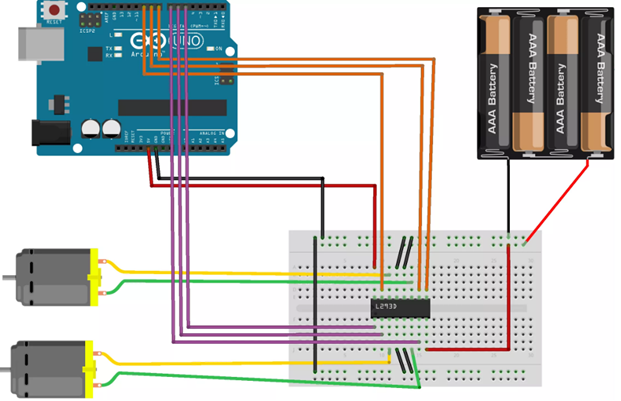
Рисунок 5 – Схема управління двигунами
Програмна частина
Програмна частина буде реалізована в коді для прошивання мікроконтролеру (Arduino скетч). Дана програма повинна визначати відстань до перешкод на шляху і розраховувати положення робота в просторі для генерації керуючих сигналів, за допомогою яких буде здійснюватися управління двигунами робота.
Слід зазначити, що в даному проекті використовувався акселерометр і гіроскоп одночасно для того, щоб підвищити точність отриманих даних. Це обумовлено різною специфікою роботи акселерометра і гіроскопа, а також параметрами, що ними визначаються.
Гіроскоп видає значення миттєвої кутової швидкості з роздільною здатністю, яка задана в настройках. Якщо прошити мікроконтролер і дивитися на ці дані, то побачимо лише нулі. Якщо почати крутити датчик, то отримаємо миттєві значення кутової швидкості. Швидкість ми отримуємо в градусах в секунду, а це означає, що лінійні швидкості не впливають на ці свідчення – показання будуть змінюватися тільки при повороті датчика в просторі. Далі за допомогою цих даних можна отримати орієнтацію об'єкта в просторі. Для цього потрібно отримати миттєве значення кутової швидкості і помножити його на проміжок часу між опитуваннями датчика гіроскопа. Приклад здатністю 2000 градусів в секунду, проміжок між опитуваннями датчика 0,1 секунда, значення миттєвої швидкості 300, значить 300 * 0,1 = 30 – за цей час вісь гіроскопа була повернута на 30 градусів. Далі кожне отримане значення потрібно скласти з попереднім. Якщо вісь рухалася в одному напрямку - значення 30 градусів, якщо в іншому, то мінус 30, таким чином, при поверненні датчика в початкове положення завжди (в ідеалі) буде 0, при відхиленні від початкового положення, при виконанні вищеописаних дій, отримаємо кут відхилення . Обробляючи кути трьох осей гіроскопу можна отримати орієнтацію об'єкта в просторі.
Таким чином, при інтегруванні стану кута положення, також інтегрується і погрішність – при тривалому використанні можна отримати вже абсолютно неправильні значення. Тому часто гіроскоп використовують в парі з акселерометром, утворюючи в найпростішому варіанті альфа-бета фільтр або комплементарний фільтр.
Акселерометр визначає прискорення по трьох осях. В результаті можна отримати дані, перетворюючи їх за допомогою геометрії, за якими можна також отримати орієнтацію об'єкта в просторі. Крім цього, акселерометр вимірює лінійні прискорення, тобто орієнтація об'єкта може спотворюватися при русі датчика в лінійних напрямках. Також за допомогою акселерометра можна визначати рух об'єкта або його зіткнення. Наприклад, детектувати падіння об'єкта або поштовх об перешкоду, щоб обходити це.
Дані від акселерометра отримуємо завжди досить точні, тобто нуль завжди залишається нулем ні за яких впливах (мається на увазі не залежить ні від часу, ні від характеру впливу), однак недолік криється в тому, що дані йдуть з шумом в деякому діапазоні даних, таким чином, до десятих часток градуса точно вимірювати кут не вийде. Зате виходячи з експериментальних даних, точність до цілих значень градуса тримається цілком стабільно. Не забуваємо також про вплив лінійних прискорень.
Висновки
Таким чином, в ході розробки системи орієнтування в просторі були визначені переваги і недоліки ультразвукових датчиків. Розроблено систему визначення відстані до об'єкта і сконструйований робот, який знаходиться в постійному русі, змінює напрямок руху при наближенні до перешкоди і підтверджує достовірність розробленої системи орієнтування.
Виконано розробку і моделювання електронного приладу, що визначає положення об'єкта в просторі за допомогою акселерометра і гіроскопа. Пристрій визначає кути підйому або спуску і генерує сигнали управління для коригування роботи двигунів. Отримана система орієнтування в просторі проста в застосуванні і дешева при розробці. Змінюючи мікросхеми драйвера двигунів можливо управління даною системою електродвигунами будь-якої потужності.
Для програмування мікроконтролера використовується мова С. Середовище розробки транслює програму на мову Assembler – зрозумілий для мікроконтролера.
Перелік посилань
- Вікіпедія – вільна енциклопедія, стаття „Закон Мура“. [Електронний ресурс]. – Режим доступу: ru.wikipedia.org
- Вікіпедія – свободная энциклопедия, статья „Три закона роботехніки“. [Електронний ресурс]. – Режим доступу: ru.wikipedia.org
- Edward Red. Robotics Overview. [Електронний ресурс]. – Режим доступу: eaal.groups.et.byu.net
- Samuel Bouchard. 7 Types of Industrial Robot Sensors. [Електронний ресурс]. – Режим доступу: blog.robotiq.com
- Андрей Антонов. Описание движения мобильного робота. [Електронний ресурс]. – Режим доступу: robotosha.ru
- Популярная робототехника – „Сенсор“. [Електронний ресурс]. – Режим доступу: poprobot.ru
- Інформаційний сайт по розробці роботів Home roboticlab – „Инфракрасный датчик расстояния“. [Електронний ресурс]. – Режим доступу: home.roboticlab.eu/ru
- Диденко Г.С. Роботизированная система с визуальным наблюдением/ Г.С. Диденко, В.А. Краснокутский// Материалы Международной научно-техническая конференции студентов, аспирантов и молодых ученых «Информационные управляющие системы и компьютерный мониторинг 2014», Донецк.
- Официальный сайт Ардуино в России. [Електронний ресурс]. – Режим доступу: arduino.ru
- Офіційний сайт Ардуіно. [Електронний ресурс]. – Режим доступу: arduino.cc
- Подбельский В. В. Программирование на языке Си: Учеб. пособие. – 2-е доп. изд./ В. В. Подбельский, С. С. Фомин. – М.: Финансы и статистика, 2004. – 600 с., ил.
- Горин Н.А. Разработка системы ориентирования в пространстве с использованием ультразвукового датчика/ Н.А. Горин, В.Н. Струнилин// Материалы Международной научно-техническая конференции студентов, аспирантов и молодых ученых «Информационные управляющие системы и компьютерный мониторинг 2015», Донецк.
- Горин Н.А. Разработка системы ориентирования в пространстве с использованием модуля GY-531/ Н.А. Горин, В.Н. Струнилин// Материалы Международной научно-техническая конференции студентов, аспирантов и молодых ученых «Информатика, управляющие системы, математическое и компьютерное моделирование 2016», Донецк.