
Создание робототехники
- 1. Три закона робототехники
- 2. Обзор современных платформ
- 3. Обзор средств взаимодействия робототехники с окружающим миром и между собой
- 4. Обзор и обоснование выбора вычислительной/управляющей части робототехники
- 5. Собственный опыт разработки роботов
- 6. Проекты, которые хочу реализовать в дальнейшем
1. Три закона робототехники
Три закона робототехники в научной фантастике – это обязательные правила поведения для роботов, впервые сформулированные Айзеком Азимовым в рассказе «Хоровод» (1942).
Эти законы гласят:
1. Робот не может причинить вред человеку или своим бездействием допустить, чтобы человеку был причинён вред.
2. Робот должен повиноваться всем приказам, которые даёт человек, кроме тех случаев, когда эти приказы противоречат Первому Закону.
3. Робот должен заботиться о своей безопасности в той мере, в которой это не противоречит Первому или Второму Законам.
Трём Законам, а также возможным причинам и следствиям их нарушения, посвящён цикл рассказов Азимова о роботах. В некоторых из них, наоборот, рассматриваются непредвиденные последствия соблюдения роботами Трёх Законов (например, «Зеркальное отражение»). Но какими бы спорными небыли данные законы в наше время стараются придерживаться их при создании роботов либо автоматизированного производства. Например, системы безопасности на производстве следят за тем, чтобы определённые механизмы не запускались если в области их работы есть человек, и он может пострадать при выполнения работы, даже если оператор пытается запустить выполнение данных производственных процессов (это наглядный пример выполнения 1-го и 2-го закона).
2. Обзор современных платформ
Системы передвижения являются важнейшей частью робота. Данные системы являются платформой для дальнейшего проектирования и налаживают ограничения на параметры создаваемого робота.
Для передвижения по ровной поверхности чаще всего используются колёсные или гусеничные платформы, реже – шагающие платформы. Ярким примером роботов на шагающих платформах я являются всем известный Asimo и роботы гексаподы(рис.1).

Рисунок 1 – Платформа для робота гексапода
Для неровных поверхностей создаются гибридные конструкции, сочетающие колёсный или гусеничный ход со сложной кинематикой движения колёс. Такая конструкция была применена в луноходе.
Гексаподы это представители роботов, которые используют принципы движения живых организмов таких как змей, червей, рыб, птиц, насекомых (в данном случае паука) и других.
Так же есть летающие роботы, использующие реактивные или электрические двигатели.
3. Обзор средств взаимодействия робототехники с окружающим миром и между собой
Для ориентирования в пространстве используются:
- ультразвуковые датчики;
- инфракрасные датчики;
- видеокамеры;
- тактильные датчики;
- электронный компас;
- гироскоп;
- акселерометр;
- GPS и другие системы спутниковой навигации.
Для взаимодействия роботов между собой можно использовать как проводные, так и беспроводные способы передачи информации.
Примером беспроводных систем являются:
- радиомодули или RF модули;
- Bluetooth;
- Wi-Fi;
- ИК-модули.
При помощи этих систем роботы могут обмениваться информацией между непосредственно между собой, но не следует забывать, что повсеместно используется интернет, и роботы могу воспользоваться этим ресурсом для обмена информацией.
4. Обзор и обоснование выбора вычислительной/управляющей части робототехники
Разработка вычислительной/управляющей части робота это самая сложная задача. В зависимости от поставленной задачи могут использоваться различные вычислительные/управляющие системы, от самых простых микроконтроллеров до суперкомпьютеров.
Для простейших роботов будет достаточно микроконтроллера, т.к. он имеет небольшие размеры, малое энергопотребление и легко программируется. Примером может послужить робот, которые ездит по комнате, объезжая все препятствия на своём пути.
Для более сложных наземных или летающих роботов, микроконтроллеров будет недостаточно, т.к. некоторые вычисления нужно производить параллельно. Для разработки таких устройств используются программируемые логические интегральные схемы (ПЛИС) или микропроцессоры. Достоинством такого выбора является гибкость в программировании, более высокое быстродействие и вычислительные мощности.
Для сложных систем управления на производстве или человекоподобных роботов используются вычислительные центры.
5. Собственный опыт разработки роботов
Мною был собран робот под названием «Бродяга» (рис.2). Принцип функционирования полученного робота следующий: если расстояние до препятствия меньше 30 см, то совершается поворот на 90 градусов посредством остановки одного колеса и продолжается дальнейшее движение до следующего препятствия.
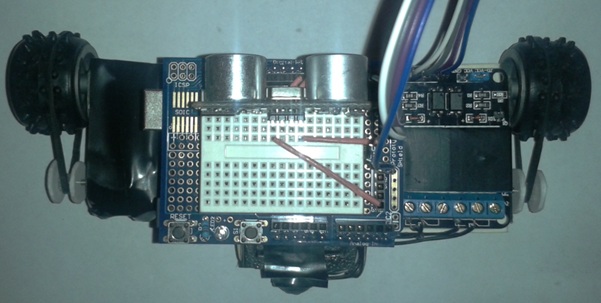
Рисунок 2 – Робот «Бродяга»
Разработка данного робота проходила на основе платформы ArduinoUno. Питание на двигатели подавалось через реле, которое замыкалось и размыкалось управляющими сигналами с микроконтроллера на платформе.
Расстояние до препятствия определялось при помощи ультразвукового дальномера HC-SR04. Сенсор дальномера работает по принципу сонара, а точнее – посылает ультразвуковой пучок и по задержке отражённого от объекта сигнала определяет расстояние до цели.
При построении данного робота я столкнулся с рядом проблем, которые описаны далее. Поскольку в основе работы устройства используется ультразвук, сонар плохо подходит для определения расстояния до звукопоглощающих объектов. Поверхность объекта должна быть ровной и гладкой для идеального измерения расстояния.
Если поверхность препятствия находится под углом более чем 22 градуса, то датчик не получит отражённый звуковой пучок, и робот упрётся в препятствие.
Самодельные редукторы, использующие ременную передачу, также имели массу недостатков из-за разного передаточного числа. Исправлено было посредством настройки редукторов.
Но самой большой проблемой оказался вес готового робота, с которым с большим трудом справлялись два двигателя. С этой проблемой сталкиваются все инженеры-роботостроители. Всю конструкцию пришлось переделывать с использованием более лёгких материалов.
6. Проекты, которые хочу реализовать в дальнейшем
Моё увлечение робототехникой и стало ключевым моментом при выборе темы дипломного проекта. Я осознал, что платформ для роботов огромное количество и не следует на этом зацикливаться. А вот системы ориентирования в пространстве достаточно интересная и перспективная тема. Есть достаточно большое количество этих систем, с которыми мы сталкиваемся ежедневно, но по отдельности они не могут обеспечить полноту информации об окружающем мире. Для решения этой проблемы необходимы комплексные системы ориентирования робототехники в пространстве. Об этом и будет идти речь в реферате.