
Реферат за темою випускної роботи
Зміст
- Вступ
- 1. Актуальність теми
- 2. Мета і задачі дослідження та заплановані результати
- 3. Огляд досліджень та розробок
- 3.1 Види несправностей і загальний вигляд системи їх діагностики
- 3.2 Методи діагностики асинхронного двигуна
- 4. Технічні вимоги до параметрів пристрою діагностики по сигналам струмів і напруг статора асинхронного двигуна
- Висновки
- Перелік посилань
Вступ
Асинхронні двигуни (АД) широко використовуються у виробництві, транспортуванні, нафтохімічншй, гірничодобувній, енергетичній системах, тощо. Це обумовлено їх високою надійністю, простотою конструкції, високою перевантажувальної здатністю і високою ефективністю. У порівнянні з двигунами постійного струму, асинхронні двигуни є більш міцними, менш дорогими і вимагають менших витрат на обслуговування. Тому вони є кращим вибором серед промислових двигунів [1].
Часом, як і будь-яка інша машина такий двигун може вийти з ладу через важкі робочі умови, агресивність робочого середовища, неправильну установку і зборку, тощо.
Вітчизняний і зарубіжний досвід показує, що введення засобів діагностування є одним з найважливіших факторів підвищення економічної ефективності використання обладнання в промисловості. Призначення діагностики & ndash; виявлення і попередження відмов і несправностей, підтримання експлуатаційних показників у встановлених межах, прогнозування стану з метою повного використання ресурсу [2].
1. Актуальність теми
У електродвигунів після ремонту з розбиранням і заміною деталей надійність роботи часто знижується. Під час ремонту проблематично виявити приховані дефекти, такі, наприклад, як дефекти стрижнів короткозамкнутого ротора або порушення ізоляції обмотки статора [3].
Вибір стратегії і методів діагностування асинхронних двигунів визначається низкою факторів. Першорядне значення має кінцева мета діагностування, яка залежить від того, на якому етапі життєвого циклу визначається технічний стан двигуна: на етапі виробництва, експлуатації чи ремонту [4].
У наш час існує потреба діагностики стану асинхронних електродвигунів в процесі їх роботи. Своєчасно виявлене пошкодження дозволить уникнути подальшого розвитку процесу, зменшити час відновлення, скоротити витрати на обслуговування, уникнути простоїв обладнання, підвищити ефективність роботи двигунів і виробничих механізмів. Тому діагностика АД є унікальною науково-практичною задачею.
2. Мета і задачі дослідження та заплановані результати
Метою магістерської роботи є огляд існуючих методів діагностики асинхронного електродвигуна і визначення найбільш простого і якісного з них.
Основні задачі дослідження:
- Огляд літературних джерел і визначення існуючих методів діагностування асинхронних двигунів.
- Виділення переваг і недоліків цих методів на стадії розробки і при практичному застосуванні.
- Виявлення оптимального методу діагностики та розробка схеми його практичної реалізації.
Заплановані результати:
- Визначення найкращого методу діагностики асинхронного двигуна в процесі експлуатації.
- Розробка схеми практичної реалізації цього методу.
- Розрахунок і вибір всіх необхідних компонентів.
- Практична реалізація цієї схеми.
3. Огляд досліджень та розробок
3.1 Види несправностей і загальний вигляд системи їх діагностики
Розрізняють внутрішні і зовнішні причини несправностей двигуна. Внутрішні несправності діляться на механічні (пошкодження підшипників, зношування ізоляції і обмоток) і електричні (пробой ізоляції, пошкодження магнітного контуру, обрив стрижня ротора). Зовнішні несправності можуть бути механічними (поганий монтаж, пульсуюче навантаження, перевантаження), електричні (коливання напруги, перебої в напрузі, нерівномірна напруга), на рисунку 1 показана відносна ймовірність появи різних пошкоджень в асинхронному двигуні:
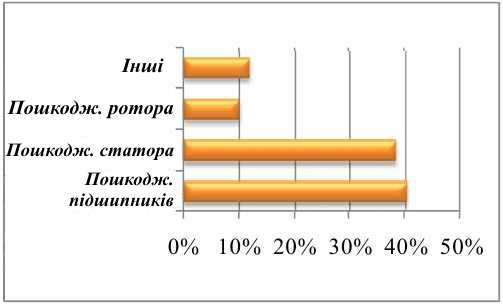
Рисунок 1 – Імовірність збоїв в АД у відсотках
Дефекти підшипників можуть бути класифіковані як розподілені
або локалізовані
. Розподілені дефекти включають в себе хвилястість, шорсткість поверхні і елементи кочення без зміни. Локалізовані дефекти включають відскоки, ями і тріщини на поверхні кочення. Ці локалізовані дефекти створюють серію ударних вібрацій в той момент, коли рухомий валик проходить по поверхні дефекту, період і амплітуда якого обчислюються за матеріальним становищем, швидкості і несучої аномалії. Пошкодженими підшипниками виробляються механічні вібрації. Ці коливання знаходяться на швидкості обертання кожного компонента. Розміри підшипника і швидкість обертання машини використовуються для визначення характерних частот, пов'язаних з доріжками кочення, а також кулями або роликами. Стан підшипника визначається шляхом вивчення цих частот. Це завдання виконується з використанням методів механічного вібраційного аналізу.
Несправності в обмотці статора, такі як межвитковое коротке замикання, обрив кола, міжфазне замикання і замикання фази з землею, є одними з найбільш поширених і потенційно руйнівних несправностей. Якщо вони не виявлені, це може привести до катастрофічного збою двигуна.
Несправності ротора можуть бути викликані електричними несправностями, такими як обрив стрижня або механічні збої, такі як неcоосніcть ротора. Перша несправність виникає через термічних напружень, гарячих точок або перенапруг під час перехідних операцій, таких як пуск, особливо в великих двигунах. Зламаний стрижень значно змінює крутильний момент і стає небезпечним для роботи електричних машин. Другий тип пошкодження ротора пов'язаний з нерівномірністю повітряного зазору. Ця помилка є загальним ефектом, пов'язаним з низкою механічних проблем в асинхронних двигунах, таких як дисбаланс навантаження або несоосність вала. Неcоосність вала означає горизонтальний, вертикальний або радіальний зсув між валом і його зчепленним навантаженням. При несоосності вала ротор буде зміщений зі свого нормального стану через постійну радіальної сили.
Типова діагностична система, показана рисунку 2, складається з вузла датчиків, який подає сигнал несправності в блок обробки сигналів, який далі відправляє його результат для аналізу експертними системами, де в підсумку виявляється відповідна несправність.

Рисунок 2 – Система діагностики АД
(анімація: 6 кадрів, 7 циклів повторення, 73,8 килобайт)
3.2 Методи діагностики асинхронного двигуна
Ідеальний сучасний спосіб діагностування електродвигунів повинен відповідати наступним вимогам:
- висока достовірність і точність виявлення несправностей і пошкоджень електродвигуна;
- можливість виявлення всіх або значної частини електричних і механічних пошкоджень електродвигуна і пов'язаних з ними механічних пристроїв;
- проведение диагностических измерений дистанционно, что актуально в тех случаях, когда доступ к оборудованию затруднен;
- проведення діагностичних вимірювань дистанційно, що актуально в тих випадках, коли доступ до обладнання затруднений;
- можливість проведення аналітичної обробки отриманих результатів вимірювань за короткий час, із застосуванням обчислювальних і програмних засобів, [5].
Ряд джерел виділяють метод аналізу спектрів струму двигуна [1], [5], [6], [7], [8], [9].Він використовується для виявлення пошкоджень ротора, несоосності а статорі і нерівномірність повітряного зазору.
Аналіз сигнатури струму двигуна заснований на виявленні струмових гармонік з частотами, які розрізняють кожну категорію несправностей. Крім того, не потрібна додаткова установка вимірювальної системи. Зламані стрижні викликають асиметрію ротора, спотворення розподілу струму ротора і, як наслідок, зміни магніторушійної сили ротора (МРС). Пошкодження стрижнів ротора має особливу характеристику частот, які можуть бути обчислені як:

На одиницю ковзання двигуна можна розрахувати, як:

де fs и fr – частота живлення и частота двигуна відповідно
р – кількість полюсів.
У разі пошкодження стрижня можна очікувати бічні смуги навколо частоти живлення в спектрі потужності фазного струму. В результаті бічні смуги (гармоніки) першого порядку (k=1) мають особливе значення в виявлення несправності пошкодженого стрижня. Ліва бічна смуга fs(1-2ks) обумовлена електричною або магнітною асиметрією ротора, викликана ушкодженнями стрижнів ротора, в той час як права бічна смуга fs(1+2ks) обумовлена пульсацією швидкості або вібрацією.
Амплітуди і присутність бічних смуг залежать від фізичного стану несправних стрижнів ротора, швидкості і навантаження. Розташування бічних смуг буде зміщуватися назовні, якщо швидкість і навантаження збільшуються. Доведено, що бічні смуги можуть спостерігатися, коли електродвигун не має пошкоджених стрижнів ротора. Це обумовлено тим, що еліптичність ротора і несоосність вала можуть певною мірою викликати асиметрію ротора. Проте, амплітуди бічних смуг, сформовані в цих випадках, набагато менші в порівнянні з тими, які виникають при пошкоджених стрижнях ротора. В роботі [6] використовувалися два несправних двигуна, один з одним зламаним стрижнем ротора, інший двигун – з двома зламаними стрижнями. Ротори цих двигунів були просвердлені і використані в випробуваннях для імітації пошкоджень стрижнів ротора, а потім порівнювалися з справним двигуном.
Рисунок 3 и рисунок 4 показують два випробовуваних ротора з одним і двома пошкодженими стрижнями відповідно. Несправності були викликані дбалим свердлінням в стрижнях уздовж їх висоти таким чином, щоб отвір наскрізь пронизав стрижень.

Рисунок 3 – Ротор з одним пошкодженим стрижнем

Рисунок 4 – Ротор с двома пошкодженими стрижнями
На рисунку 5 показані спектри струму справного і несправного двигунів при різних навантаженнях. Амплітуди бічних смуг справного двигуна рівні -27,27 дБ (зліва) і -34,38 дБ (зправа), тоді як вони складають -16,19 дБ (зліва) і -19,03 дБ (зправа)в разі одного пошкодженого стрижня і -13,01 дБ (зліва) і -14,80 дБ (зправа) в разі двох пошкоджених стрижнів. Різниця амплітуд лівих бокових смуг в разі справного ротора і ротора з двома пошкодженими стрижнями становить 14,26 дБ при 75% від повного навантаження. Зрозуміло, що амплітуда бокового діапазону збільшується в міру збільшення навантаження і ступеня серйозності несправності, і що несправність може бути краще за все виявлена при більш високих навантаженнях.
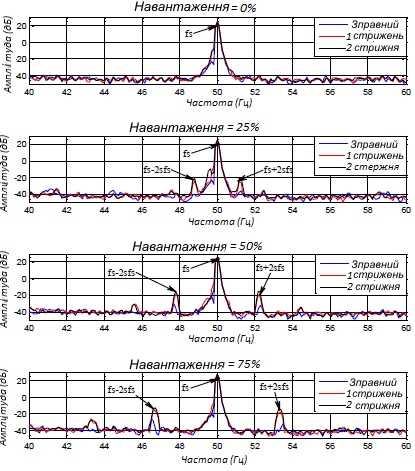
Рисунок 5 – Спектри струму асинхронного двигуна при різних навантаженнях
У роботі [7] був проведений схожий експеримент, але з трьома пошкодженими стрижнями ротора.
Ефективним є і метод заснований на аналіз вібрації двигуна [6], [7], [9]. Використовуючи спектр вібрації двигуна, можна визначити точну швидкість і частоту мережі, а також частоти, пов'язані з помилками. Завжди наявний дисбаланс маси ротора і несоосність вала, що призводить до пікових компонентів в частоті обертання двигуна і до виникнення гармонік в його вібраційному спектрі. Як згадувалося раніше, в разі пошкодження стрижня ротора відбувається коливання швидкості з частотою 2sfs. Це коливання діє як частотна модуляція на частоті обертання і на двох частотах бічних смуг (fr - 2sfr) и (fr + 2sfr), які проявляють fr в спектрі вібрації. Коли дисбаланс кола ротора збільшується, величина коливання швидкості, а також величини частоти бічної смуги теж збільшуються. Отже, величини (fr ± 2sfr) можуть бути добре виміряні при виявленні пошкоджень стрижня. В роботі [6] представлений результат проведення цього методу виявлення пошкодженого стрижня з використанням вібрації.
На рисунку 6 показаний спектр вібрації двигуна при різному навантаженні. На малюнку видно різницю в бічних смугах між справним станом і зламаним стрижнем ротора на обох сторонах спектра вібрації при 75% повного навантаження. При нормальному стані амплітуди бічних смуг першого порядку складають -59,47 дБ (слева) и -55,18 дБ (справа) відповідно. При одному пошкодженому стрижні ротора амплітуда бічних смуг збільшується до -57,81 дБ и -54,52 дБ, різниця складає 4,29 дБ, а в разі двох пошкоджених стрижнів бічні смуги досягають -53,35 и -49,05 дБ.
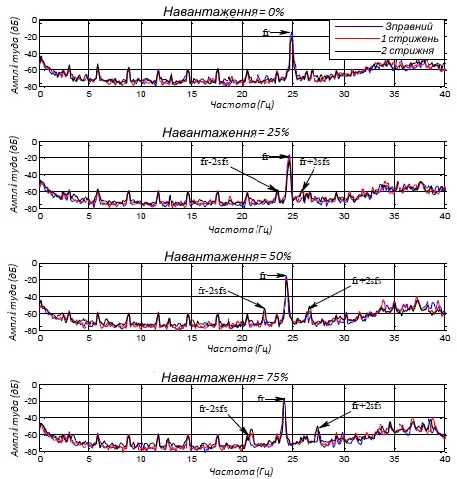
Рисунок 6 – Спектри вібрації асинхронного двигуна при різних навантаженнях
В роботі [7] с помощью спектра вибрации показаны обнаружения повреждений в подшипниках двигателя.
В роботах [7], [8] виділяються також інтелектуальні методи. До них відносять системи з фазі логікою, штучні нейронні мережі, а також фазі-нейронні мережі. Нейронна мережа може бути використана, щоб виявити, власну асиметрію і негативну частоту опору.
На рисунку 7 представлена схема нейронних мереж для моніторингу стану асинхронного двигуна [7].
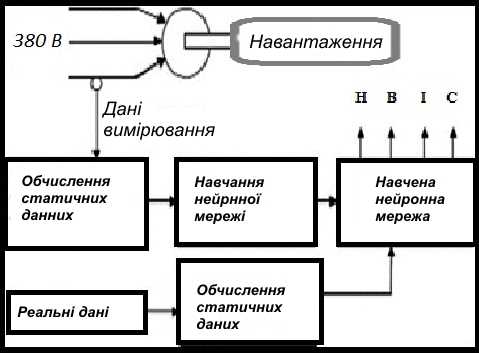
Рисунок 7 – Система діагностики АД з нейронною мережею
Робота [8] представляє власний метод виявлення несправностей і діагностики несправності перемикає пристрої в асинхронному електродвигуні з інвертором напруги ШІМ. Метод заснований на стандартній моделі струму статора (рисунок 8)

Рисунок 8 – Система діагностики АД з інвертором напруги ШІМ
Також відомі методи, засновані на аналізі акустичних коливань, створюваних працюючою машиною, методи, засновані на вимірі і аналізі магнітного потоку в зазорі двигуна і зовнішнього магнітного поля, методи, засновані на вимірі і аналізі температури окремих елементів машини, методи діагностики механічних вузлів (зокрема підшипників) засновані на аналізі вмісту заліза в маслі, методи діагностики стану ізоляції [9].
У порівнянні всіх технічних, методологічних і економічних факторів можна зробити висновок, що для практичної реалізації найбільш перспективними є методи діагностики АД, засновані на аналізі електричних параметрів двигуна, а саме спектрів напруг і струмів.
4. Технічні вимоги до параметрів пристрою діагностики по сигналах струмів і напруг статора асинхронного двигуна
Для виведення технічних вимог до параметрів пристрою діагностики по сигналам струмів і напруг статора асинхронного двигуна, було розглянуто і проаналізовано ряд джерел.
Так в публікації [10] основні дослідження проводилися з такими частотами: спектр струму при невідбалансованому роторі – 120 Гц, вібрація підшипників – 180 Гц, при зносі підшипників – 1000 и 3000 Гц.
В статті [11] вказується, що в загальному випадку при цифровії реєстрації струмів задовільна точність має місце при частотах їх фіксації в (20 ÷ 30) раз більше частоти мережі f1.
В статтях [5] и [9] для порівняння роботи нового двигуна і двигуна, який прослужив якийсь час, був обраний діапазон частоти в 1000 Гц, а конкретні приклади діагностики дефектів двигуна проводилася на меншому діапазоні (150 Гц и ниже).
На підставі вищенаведеної інформації робимо висновок, що частота дискретизації вимірювального каналу повинна знаходиться в межах від 1500 до 3000 Гц.
Висновки
На сьогоднішній день вже існує безліч методів діагностики стану асинхронного двигуна в процесі його експлуатації. Всі вони досі удосконалюються, що підтверджує їх актуальність і практичну працездатність.
У даній роботі були розглянуті найбільш відомі з них, і виділено, що найбільш перспективними для практичної реалізації є методи діагностики асинхронного двигуна, засновані на аналізі електричних параметрів двигуна, а саме спектрів напруг і струмів. А також висунуто вимогу до частоти дискретизації вимірювальних каналів для цього методу.
Подальші дослідження спрямовані на наступні аспекти:
- Вибір оптимальної структури схеми практичної реалізації методу діагностики асинхронного двигуна;
- Розрахунок і вибір необхідного обладнання;
- Представлення робочої схеми для практичної реалізації діагностики асинхронного двигуна в процесі його експлуатації.
На момент написання даного реферату магістерська робота ще не завершена. Орієнтовна дата завершення магістерської роботи: червень 2017 року. Повний текст роботи та матеріали по темі можуть бути отримані у автора або його керівника після зазначеної дати.
Перелік посилань
- Fang Duan Diagnostics of rotor and stator problems in industrial induction motors// Adelaide University: [Электронный ресурс]. – URL: https://digital.library.adelaide.edu.au/dspace/bitstream/2440/65202/8/02whole.pdf
- Ширман А.Р., Практическая вибродиагностика и мониторинг состояния механического оборудования/ Ширман А.Р., Соловьев А.Б. – Москва, 1996. 276с.
- Полковниченко Д.В. Послеремонтная оценка технического состояния короткозамкнутых асинхронных электродвигателей// eNTUKhPIIR: [Электронный ресурс]. – URL: http://repository.kpi.kharkov.ua/bitstream/KhPI-Press/11713/1/EE_2005_1_Polkovnichenko_Posleremontnaya.pdf .
- Генкин М.Д. Виброакустическая диагностика машин и механизмов/ Генкин М.Д., Соколова А.Г. – М.: Машиностроение, 1987. 288 с.
- Петухов В.С Диагностика состояния электродвигателей на основе спектрального анализа потребляемого тока/ Петухов В.С Соколов В.А.// [Электронный ресурс]. – URL: http://www.tesla.ru/publications/files/051.pdf .
- A. Alwodai, F. Gu, A.D. Ball A Comparison of different techniques for induction motor rotor fault diagnosis/ 25th International Congress on Condition Monitoring and Diagnostic Engineering, IOP Publishing, Journal of Physics: Conference Series 364, 012066, 2012.
- Partha Sarathee Bhowmik, Sourav Pradhan, Mangal Prakash Fault diagnostic and monitoring methods of induction motor: a review/ International Journal of Applied Control, Electrical and Electronics Engineering (IJACEEE), Vol. 1, no. 1.
- Demba Diallo, Mohamed Benbouzid, Denis Hamad, Xavier Pierre Fault detection and diagnosis in an induction machine drive: A pattern recognition approach based on concordia stator mean current vector// Archive Ouverte HAL-UPMC: [Электронный ресурс]. – URL: http://hal.upmc.fr/file/index/docid/526691/filename/IEEE_TEC_2005_DIALLO.pdf.
- Сидельников Л.Г. Контроль технического состояния асинхронных двигателей в процессе эксплуатации/ Сидельников Л.Г., Афанасьев Д.О. – Пермский национальный исследовательский политехнический университет.
- Habtler T.G. и Harley R.G. Diagnostics and intelligent controls in electrical systems – Georgia Institute of Technolgy/ АРЕС 25 February 2004.
- Сивокобыленко В.Ф. Диагностика асинхронного электропривода по данным измерений рабочего режима/ Сивокобыленко В.Ф. Полковниченко Д.В., Кукуй К.А. – Донецкий национальный технический университет: [Электронный ресурс]. – URL: http://ea.donntu.ru/bitstream/123456789/7204/1/7_2003.pdf.