
Реферат по теме выпускной работы
Содержание
- Введение
- 1. Актуальность темы
- 2. Воздействие на момент турбины средствами противоаварийного управления
- 3. Воздействие противоаварийного управления на системы возбуждения синхронных генераторов
- 4. Программное обеспечение для исследования средств противоаварийного управления
- Выводы
- Список источников
Введение
Противоаварийное управление должно решать следующие задачи:
- Избежание нарушения устойчивости параллельной работы энергосистемы.
- Ликвидация асинхронного режима, если предотвратить нарушение устойчивости не удалось.
- Величины напряжений, токов и частоты не должны выйти за допустимые пределы.
Главной и первостепенной задачей выступает первая из вышеперечисленных, так как удержание устойчивости в большинстве случаев является главным фактором, который обеспечивает решение и других задач.
Решить задачу обеспечения динамической устойчивости – это значит предотвратить переход относительных углов между векторами ЭДС синхронных машин за пределы допустимых значений на протяжении всего аварийного процесса до наступления нового установившегося режима.
1. Актуальность темы
Главные аспекты исправного функционирования электроэнергетической системы – надёжность или устойчивоспособность (надежность параллельной работы – определяется в качестве ущерба у потребителей, который является следствием аварийного недоотпуска электроэнергии в течение заданного периода времени) и живучесть (свойство энергосистемы, благодаря которому энергосистема может противостоять тяжелым аварийным возмущениям, предотвращая дальнейшее развитие аварий) обеспечиваются, как правило, рядом таких мероприятий:
- Такие, при которых должны быть зарезервированы генерирующие мощности и пропускные способности ЛЭП ;
- Оптимизация режимов работы энергосистем с учетом балансов гидроресурсов и топливных ресурсов;
- Рациональным расположением энергетических объектов;
- Доработка и модификация автоматизации диспетчерского управления;
- Повышением уровня квалификации и производственной дисциплины персонала, работающего на энергообъектах и др.
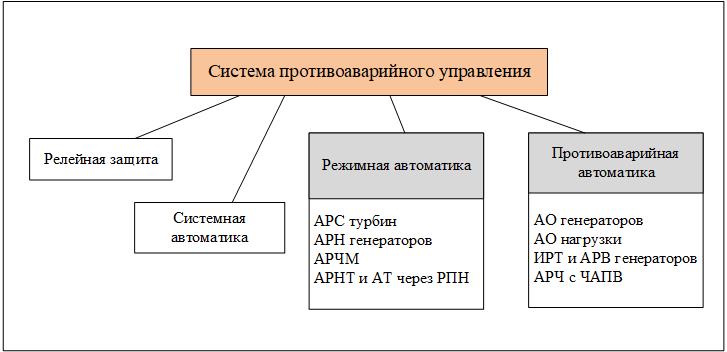
Рисунок 1 – Элементы системы противоаварийного управления
Различают следующие средства управления: коммутационного типа (включение-отключение элементов энергосистемы); с изменением момента турбины путем увеличения или уменьшения подачи пара или воды; изменением возбуждения синхронных генераторов и компенсаторов; изменением режима работы преобразовательных устройств в системе передачи, распределения и потребления электроэнергии. [1]
Усовершенствование и улучшение качества работы основных средств автоматического противоаварийного управления является залогом правильного и бесперебойного функционирования элементов ЭЭС, также не стоит забывать, что необходимо разрабатывать и внедрять новые дополнительные управляющие устройства непосредственного воздействия на переходные процессы в энергосистемах.
2. Воздействие противоаварийного управления на момент турбины
К средствам противоаварийного управления воздействия на момент турбины относятся: импульсная разгрузка турбин, ограничение мощности турбины, форсирование мощности турбины. Сила воздействия на момент турбины зависит от характеристик котлотурбинного агрегата. На рис. 3 приведена упрощенная схема энергоблока, в которой использованы следующие сокращения наименований агрегатов и устройств регулирования: ЦВД – цилиндр высокого давления(турбина активного типа) ЦСД – цилиндр среднего давления(включает в себя корпус с выхлопными патрубками, ротор и направляющий аппарат) ЦНД – цилиндр низкого давления турбины; БРОУ – быстродействующая редукционная охладительная установка; АРС – автоматический регулятор скорости турбины; ЭГП – электрогидравлический преобразователь; РДП – регулятор давления пара; СРПГ – система регулирования парогенератора (котла). Каждый энергоблок оснащается автономной системой регулирования скорости вращения, и непосредственно включен в систему автоматического регулирования частоты и мощности (АРЧМ). Автоматическая частотная разгрузка (АЧР) является важнейшей составной частью автоматики. Если произошло снижение частоты, она не позволит выйти за недопустимые пределы. Если при этом в части, которая оказалась отделенной, не запасен резерв мощности в виде недогруженных агрегатов, то очень вероятно, что может произойти недопустимое снижение частоты. При этом следует иметь виду, что котельные агрегаты должны обеспечивать резерв мощности турбоагрегатов. Возможность и скорость ввода резерва на тепловых электростанциях зависит от многих факторов: принятого способа регулирования мощности турбин, типа исполнения котельного агрегата (прямоточный, барабанный, с естественной циркуляцией, с принудительной циркуляцией), технического состояния теплового оборудования. [3]
При некотором снижении частоты вследствие возникновения дефицита активной мощности, должен сработать АЧР и отключить часть тех потребителей электроэнергии, которые являются наименее ответственными. Наиболее распространённая в современных энергосистемах причина дефицита мощности – это аварийное отключение линии электропередач, которая обеспечивает связь дефицитного района с остальной частью энергосистемы.
Как известно, каждый энергоблок может быть включен в систему автоматического регулирования частоты и мощности (АРЧМ). Автоматическое регулирование скорости вращения турбины способно не только обеспечить требуемое качество электроэнергии, но и предотвратить такое явление,как лавина частоты, являясь таким образом очень важным и часто неотъемлемым средством по обеспечению надежности. [3]
Повышение устойчивости при помощи изменения мощности турбин достигается двумя способами – увеличение мощности турбины или путём уменьшения (разгрузки) мощности турбины. Разгрузка турбин используется для сохранения статической и динамической устойчивости параллельной работы энергосистемы и позволяет резко ускорить ресинхронизацию станции или энергосистемы.
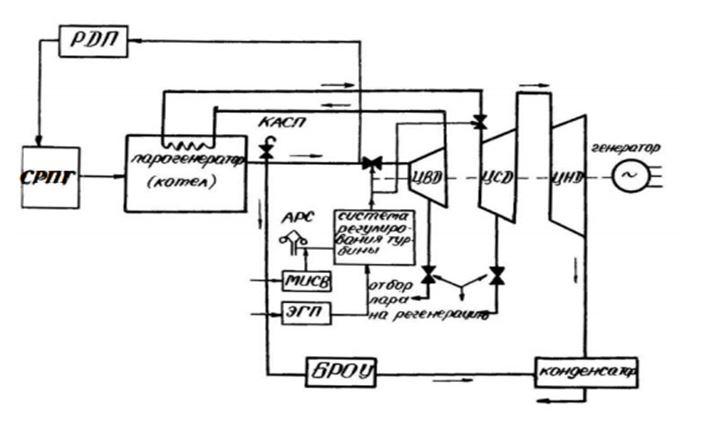
Рисунок 2 – Упрощенная схема энергоблока
В некоторых ситуациях при регулировании турбин может произойти ощутимое перераспределение мощности в послеаварийном режиме, уменьшая эффекты как от отключения нагрузки, так и от отключения генераторов. Неблагоприятным также может оказаться воздействие системы регулирования частоты. Вместе с тем АРЧМ благодаря наличию системы ограничения перетоков, которая очень часто способна предотвратить нарушение устойчивости при внезапных аварийных перегрузках линии. Котельная автоматика также может оказывать неблагоприятное воздействие, в частности она осуществляет регулирование давления пара для поддержания стабильного давления перед самой турбиной. Если произойдет снижение частоты, давление пара перед турбиной начнёт падать и при этом срабоает регулятор, который закроет клапана и, тем смым, снизит мощность турбины. [3].После этого, через несколько минут возникнет самопроизвольная разгрузка энергоблоков, что вновь приведет к снижению частоты и чревата возникновением различных нарушений устойчивости и развития аварий.Однако если регулировать энергоблок при полностью открытых клапанах с управляя мощностью через изменение параметров пара, то колебания частоты практически исчезнут. Из-за всего этого существенно снижается регулирующий эффект генерации в энергосистеме, средства противоаварийной автоматики теперь будут главным средством поддержания частоты при сильных возмущениях в аварийных условиях. [4]
3. Воздействие противоаварийного управления на системы возбуждения синхронных генераторов
Форсировка возбуждения даётся не регулятором возбуждения (АРВ) и не специальным устройство форсирования, а дополняет всё это и обеспечивается устройствами АПНУ(Автоматика предотвращения нарушения устойчивости). Такой вид ФВ требуется только в том случае, если АРВ не даёт форсировки в тех условиях, когда она необходима.[1]
Автоматические регуляторы возбуждения сильного действия применяют для того, чтобы повысить устойчивость параллельной работы турбо и гидрогенераторов на электростанциях, которые связяны с энергосистемой длинными и чрезвычайно загруженными линиями электропередачи. Из-за несколько увеличенных реактивных опротивлений современных мощных турбогенераторов, имеющих непосредственное охлаждение обмоток, на устойчивость энергосистемы может оказываться неблагоприятное влияние, однако использование АРВ сильного действия позволяют сгладить и компенсировать эти возмущения.[2]
В основном используются непрерывные системы регулирования. Эти системы, особенно регуляторы возбуждения (АРВ) сильного действия обеспечивают значительное повышение статической устойчивости и достаточно корректное управление возбуждением во время переходных процессов. По принципу формирования управляющего воздействия, их разделяют на две группы. Одна из них в качестве входных параметров использует отклонение напряжения ΔU на шинах генератора или на сборных шинах высшего напряжения от заданного значения отклонения частоты Δf на зажимах генератора от исходного значения и их производные. Вторая группа использует отклонения тока генератора или электропередачи ΔI от исходного значения и производные от тока. [2]
По сути форсировка возбуждения генератора – это ничто иное как стремительное увеличение тока возбуждения до его максимального предельного значения. Именно благодаря этому достигается повышение динамической устойчивости электропередачи. С помощью устройств релейного автоматического также осуществляется форсировка возбуждения генератора. [6]
Регулирование возбуждения генератора как средство влияния на динамическую устойчивость можно рассмотреть качественно. На рис 1.3, жирной линией показаны площадки в случае нарушения устойчивости при работе без регулирования возбуждения. [7]
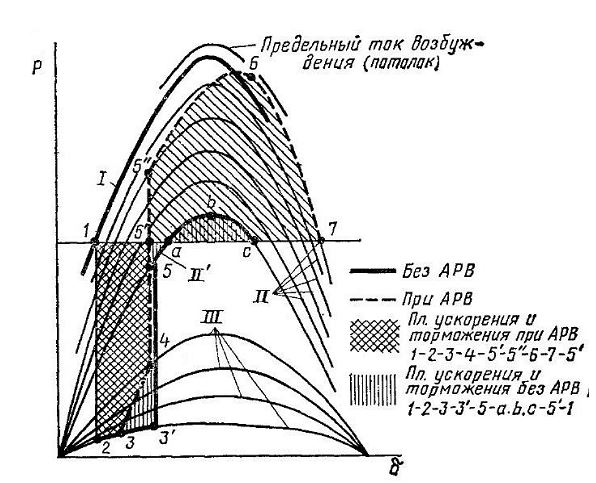
Рисунок 3 – Эффект форсирования возбуждения (функция P=f(δ))
Форсировка возбуждения позволяет удержать генератор в синхронизме в первом цикле качаний. Во втором цикле качаний форсировку возбуждения необходимо снимать. Если этого не сделать, то очень вероятно, что произойдёт нарушение устойчивости во втором цикле качаний (рис. 1.3). [7]
Анализ противоаварийного управления, которое воздействует на возбуждение генератора даёт возможность сделать вывод о том, что целесообразность необходимо обосновывать на основании предварительных исследований в зависимости от конкретных условий работы электроэнергетической системы. [8].
4. Программное обеспечение для исследования средств противоаварийного управления.
Разрабатываемое в данной работе программное обеспечение должно удовлетворять следующим требованиям:
- Программное обеспечение (ПО) должно давать возможность осуществлять оценку влияния на характеристики турбины и генератора на основе расчетов электромеханических переходных процессов в электроэнергетической системе.
- На основе соотношений избыточных кинетических энергий, которые ротор эквивалентного генератора приобретает в течение всего переходного процесса (
метод площадей
), с использованием угловых характеристик мощности, должна производится оценка условий сохранения или нарушения синхронной динамической устойчивости. - Должен быть предусмотрен расчет угловых характеристик мощности для всех исследуемых режимов работы электрической системы:
- нормальный исходный режим, когда включены все возможные связи между передающей и приемной частями электроэнергетической системы;
- аварийный режим, вызванный возникновением коротких замыканий на линиях электропередачи;
- послеаварийный режим, наступающий после отключения всех линий, на которых произошло повреждение;
- Программное обеспечение должно предусматривать возможность исследования влияния ИРТ при различных длительностях импульса и разном количестве неравномерности этих импульсов, их своевременность, а также возможность исследования форсировки возбуждения генератора во втором и третьем циклах качаний.
- Должен быть предусмотрен расчет коротких замыканий различных видов (трехфазное, двухфазное, двухфазное на землю и однофазное) на любом расстояния от управляемого объекта (турбогенератора).
- Для оценки условий сохранения СДУ в программном обеспечении должно быть предусмотрено определение зависимостей отдаваемых генератором активных мощностей, а также зависимости изменения во времени угловых положений ротора в течение переходного процесса.
- Расчет изменения угла вылета ротора во времени необходимо производить на основе интегрирования дифференциального уравнения движения ротора генератора численными методами.
- Длительность расчета переходного процесса должна охватывать 2 – 3 цикла качаний ротора в переходном режиме, так как при определенных условиях возможно нарушение динамической устойчивости не в первом, а во втором или третьем цикле качаний.
- Программное обеспечение должно разрабатываться с использованием пакетов прикладных программ для ПЭВМ, позволяющих наиболее простоосуществлять решение дифференциальных уравнений и наглядно выполнять графические зависимости угловых характеристик мощности и изменения во времени угловых положений ротора генератора.
Программное обеспечение создавалось в математическом пакете Mathcad. Он позволяет решенать алгебраические и дифференциальные уравнения как с постоянными, так и с переменными параметрами, позволяет проводить анализ функций, поиск их экстремумов, численное и аналитическое дифференцирование и интегрирование, вывод таблиц и графиков при анализе найденных решений. В пакете есть также элементы программирования. Встроенный в пакет язык программирования легко осваивается и позволяет решать самые различные и достаточно сложные задачи и также является серьезным инструментом для расчетов. Встроенный в последние версии MathCAD язык программирования достаточно мощный и весьма элегантный. MATHCAD - универсальный математический пакет,который предназначен для выполнения инженерных и научных расчетов. Основным преимуществом пакета является естественный и легко усваиваемый математический язык, на котором формируются поставленные задачи. Пакет обладает широкими графическими возможностями. Возможность создания анимаций очень помогло при написании данной работы. Так, при проверки электроэнергетической системы на устойчивость очень легко определить, при каких значениях эта устойчивость была нарушена.
Выводы
Разработанное программное обеспечение является программным средством и позволяет исследовать влияние воздействия на момент турбины и возбуждение генератора и оценить динамическую устойчивость энергосистемы. С помощью этих программ было выполнено исследование противоаварийной автоматики. Такое исследование позволяет выполнить оценку параметров для настройки устройств воздействия на момент турбины и форсировку возбуждения генераторов в различных аварийных ситуациях при больших возмущениях в системе.
Магистерская работа на данный момент ещё не завершена.В данный реферат в течение завершения работы будут вноситься изменения. Ориентировочное завершение работы: май 2018 года. Готовая работа может быть получена у автора работы или его руководителя после официальной защиты магистерской диссертации при наличии соответствующего разрешения.
Список источников
- Кощеев, Л.А. Автоматическое противоаварийное управление в электроэнергетических системах / Л.А. Кощеев. – Л.:Энергоатомиздат, 1990. – 145 с.
- Глускин, И.З. Противоаварийная автоматика в энергосистемах / И.З. Глускин, Б.И. Иофьев. – М.:
Знак
. 2009. – 568 с. - Окин, А.А Противоаварийная автоматика энергосистем / А.А. Окин. – М.: Издательство МЭИ, 1995. – 212 с.
- Совалов, С.А. Противоаварийное управление в энергосистемах / С.А. Совалов, В.А. Семенов. – М.: Энергоатомиздат, 1980. – 416 с.
- Веников, В.А. Переходные электромеханические процессы в электрических системах / В.А. Веников. – М.: ВШ, 1985. – 536 с.
- Овчаренко, Н.И. Автоматика энергосистем: учебник для вузов.– 3-е изд., исправленное / Н.И. Овчаренко; под ред. чл.-корр. РАН, докт. техн. наук, проф. А.Ф. Дьякова.– М.: Издательский дом МЭИ, 2009. – 476 с.
- Куликов, Ю.А. Переходные процессы в электрических системах: Учеб. пособие / Ю.А. Куликов. – Новосибирск: НГТУ, М.: Издательство
Омега-Л
, 2013. – 384 с. - Колесник, Г.П. Переходные электромеханические процессы в электроэнергетических системах : учеб. пособие / Г. П. Колесник ; Владим. гос. ун-т. – Владимир : Изд-во Владим. гос. ун-та, 2008. – 116 с.