
Реферат по теме выпускной работы
Содержание
- Введение
- 1. Актуальность темы
- 2. 2. Цель и задачи исследования, планируемые результаты
- 3. Обзор литературных источников
- 3.1 Центробежные насосы, их конструкция, характеристики и энергетические показатели
- 3.2 Частотное регулирование скорости электроприводов асинхронных электродвигателей
- 3.3 Состав стенда
- 3.4 Рекомендации по энергосбережению
- Список источников
Введение
В настоящее время эффективное использование энергии в целом и электричества в частности – это одна из сегодняшних глобальных проблем экономики. Энергосбережение (рационализация производства энергии, распределения и использования) в последние годы стало одним из самых важных направлений технической политики во всех странах. Нужно отметить, что использование электропривода является одним из многих средств энергосбережения. Электропривод является основным потребителем электроэнергии. Это, примерно 80% процентов от вырабатываемой электроэнергии. Использование асинхронного электропривода в механизмах и машинах составляет порядка 75 %.И эта тенденцией постоянно увеличивается. Такой рост вызван с одной стороны благодаря применению современных электропроводящих и изоляционных материалов в производстве асинхронных двигателей, а это позволяет повышать его энергетические характеристики. тем самым, обеспечивая экономию электроэнергии в традиционных областях применения асинхронных двигателей. А с другой стороны, скачок на современном уровне развития электроники обеспечивает изготовление быстродействующих, надежных, недорогих и простых в эксплуатации преобразователей частоты. Использование регулируемого электропривода помогает экономить электроэнергию. А это означает что чем точнее учет особенностей работы исполнительных механизмов, тем лучше работа самого асинхронного двигателя.
1. Актуальность темы
Очень важным пунктом является снижение энергетических расходов. Особенно это касается больших предприятий, где затраты в основном осуществляются при снабжении электродвигателей. Например, такие турбо механизмы как насосы, вентиляторы, компрессоры, используют порядка 25% всей вырабатываемой электроэнергии. Необходимо отметить, что мало внимания уделяется созданию энергоэффективных и экономных режимов работы насосных установок. Значительная часть электроэнергии используется нерационально ,с большими затратами На сегодняшний день. исследование энергетических показателей и дальнейшее уменьшение затрат является актуальной темой на сегодняшний день.
2. Цель и задачи исследования, планируемые результаты
Цель работы это исследование энергетических показателей регулируемого электропривода насосной установки и определение наиболее эффективных методов их улучшения.
Задачи исследования:
- Обзор литературных источников о конструкции, характеристиках и энергетических показателей центробежных насосов.
- Обзор литературных источников о частотном регулировании скорости электроприводов асинхронных электродвигателей.
- Разработка структуры и состава стенда для исследования энергетических показателей работы центробежного насоса с регулируемым электроприводом.
- Проведение экспериментальных исследований на лабораторном стенде.
- Разработка рекомендаций об улучшении энергетических показателей частотно регулируемого электропривода центробежных насосов.
3. Обзор литературных источников
3.1 Центробежные насосы, их конструкция, характеристики и энергетические показатели
Центробежный насос – это насос для перекачивания жидкостей, в котором движение жидкости и необходимый напор создаются за счёт центробежной силы, возникающей при воздействии лопастей рабочего колеса на жидкость.
Центробежные насосы классифицируют следующим образом:
- согласно числу ступеней (1 и 2-х ступенчатые) ;
- согласно числу входов в рабочее колесо (с 1 и 2-х сторонним входом);
- согласно расположения рабочего колеса относительно подшипниковых опор вала (межопорные, консольные);
- согласно расположения оси рабочего колеса (вертикальные и горизонтальные);
- согласно величины коэффициента быстроходности рабочего колеса (тихоходные,нормальные, быстроходные);
- согласно компоновки насосного агрегата (раздельные, моноблочные);
- согласно назначения (химические, пищевые, нефтяные, конденсатные, и др.)
Есть различные виды насосов. Самыми распространенными в промышленности являются центробежные насосы. Их преимуществами являются: равномерность подачи, высокая производительность, компактность, простота механизма и быстроходность благодаря возможности непосредственного присоединения к электродвигателю. Так же нужно упомянуть возможность изготовления насосов из химически стойких, трудно поддающихся механической обработке материалов. Преимуществами являются также возможность перекачивания загрязненных жидкостей и суспензий и установки на легких фундаментах. Недостатками таких насосов являются сравнительно низкие развиваемые напоры, а также сильное влияние сопротивления сети на производительность и КПД насоса.[1],[2]

Рисунок 1 – Графическое изображение центробежного насоса [3]
(анимация: 5 кадров, 7 циклов повторения, 164 килобайт)
Комплексная характеристика центробежного насоса представляет собой совместное графическое изображение зависимостей напора Н, потребляемой мощности N и коэффициента полезного действия h от общей производительности (подачи) Q насоса при постоянной или переменной частоте вращения рабочего колеса. Комплексная характеристика дана на рисунке 2.
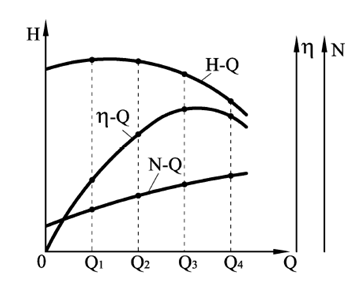
Рисунок 2 – Комплексная характеристика центробежного насоса
Наиболее важной характеристикой является взаимосвязь производительности и напора. Теоретическая характеристика напора описывается уравнением прямой линии.
где, С и Е – постоянные величины, значения которых зависят от частоты вращения, формы и размеров рабочего колеса.
Положение характеристики в координатах H – Q при заданных значениях числа оборотов n, наружного диаметра колеса D2 и ширины канала на выходе из колеса b2 зависит от лопаточного угла на выходе β2. Характеристика H – Q представлена на рисунке 3.
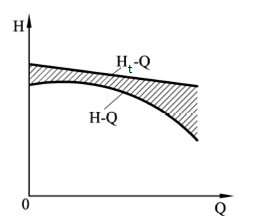
Рисунок 3 – Характеристика H–Q
Умножая левую и правую части выражения выше на величину весового секундного расхода, получаем уравнение характеристики теоретической мощности центробежного насоса:
где, Nt – теоретическая мощность; ρ – плотность перекачиваемой жидкости; Q – производительность насоса.
В зависимости от величины наклона, характеристика теоретической мощности графически выглядит в виде прямой или кривой линии, выходящей из начала координат графика N – Q. Характеристика изображена на рисунке 4.
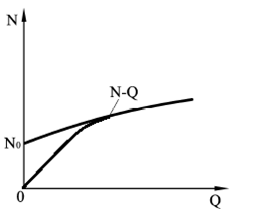
Рисунок 4 – Характеристика N – Q
Фактический напор отличается от теоретического на величину потерь в проточной части машины. Поэтому характеристика имеет форму, отличающуюся от теоретической, и на графике располагается ниже ее.
Фактическая характеристика мощности насоса может быть получена из теоретических характеристик путем суммирования (при заданных производительностях) значений теоретической мощности и ее потерь. При этом сохраняется зависимость мощности от производительности.
Основным отличием является то, что фактические характеристики мощности не выходят из начала координат вследствие потерь мощности в режиме холостого хода(Q = 0,N ≠0).
Коэффициент полезного действия насоса представляет собой отношение полезной мощности Np к потребляемой N:
Очевидно, что полный КПД равен нулю при Q = 0 и Н = 0, потому что при всех режимах работы насоса N ≠0. В пределах между Q = 0 и Q = Q max полный КПД достигает максимального значения. Характеристика η – Q приведена на рисунке 5.
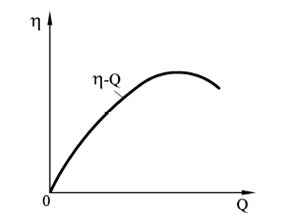
Рисунок 5 – Характеристика η – Q
Режим работы насоса, при котором его КПД достигает максимальной величины, называют оптимальным режимом. Согласно значениям Q0 и Н0, соответствующим оптимальному режиму, можно найти величину коэффициента быстроходности ns, вычисляемого по формуле:
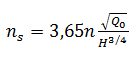
где, n – частота вращения рабочего колеса; Q0 – оптимальная производительность; H0 – оптимальный напор.
Коэффициент быстроходности является режимным критерием похожим на течение жидкости в насосах и играет важную роль в деле их создания и применения. Большие частоты вращения выгодны потому, что они обусловливают малые размеры насоса и приводного двигателя. Следовательно, экономически целесообразно применять насосы высокой быстроходности.
При заданной частоте вращения видно, что чем коэффициент быстроходности выше, тем больше производительность и меньше напор. Поэтому насосы с высоким коэффициентом быстроходности являются низконапорными и высокопроизводительными.[4]
3.2 Частотное регулирование скорости электроприводов асинхронных электродвигателей
В настоящее время широко применяется частотное регулирование угловой скорости вращения электропривода с асинхронным двигателем. Это позволяет плавно изменять обороты вращения ротора в широком интервале как выше, так и ниже номинальных значений.
Частотные преобразователи являются современными, высокотехнологичными устройствами. Они обладают большим диапазоном регулирования, и имеет обширный набор функций для управления асинхронными двигателями. Высочайшее качество и надежность дают возможность применять их в различных отраслях для управления приводами насосов, вентиляторов, транспортеров и т.д.
Частотные преобразователи по напряжению питания подразделяются на однофазные и трехфазные, а по конструкции на электромашинные вращающиеся и статические. В электромашинных преобразователях переменная частота получается за счет использования обычных или специальных электрических машин. В статических частотных преобразователях изменение частоты питающего тока получают за счет применения не имеющих движения электрических элементов.
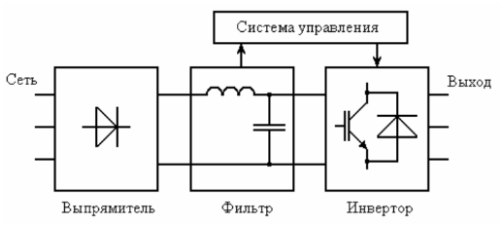
Рисунок 6 – Схема частотного преобразователя асинхронного двигателя
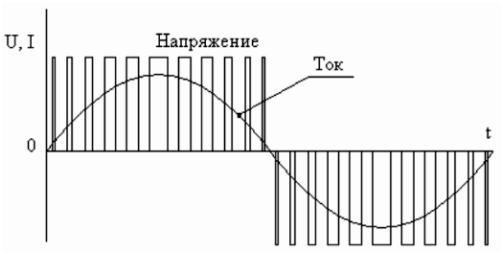
Рисунок 7 – Выходной сигнал преобразователя частоты
Преобразователи частоты для однофазной сети позволяют обеспечить электропривод производственного оборудования мощностью до 7,5 кВт. Особенностью конструкции современных однофазных преобразователей является то, что на входе имеется одна фаза с напряжением 220В, а на выходе – три фазы с тем же значением напряжения. Это позволяет подключать к устройству трехфазные электродвигатели без применения конденсаторов.
Преобразователи частоты с питанием от трехфазной сети 380В выпускаются в диапазоне мощностей от 0,75 до 630 кВт. В зависимости от величины мощности устройства изготавливаются в полимерных комбинированных и металлических корпусах. Самой популярной стратегией управления асинхронными электродвигателями является векторное управление. В настоящее время большинство частотных преобразователей реализуют векторное управление или даже векторное бездатчиковое управление (это направление встречается в частотных преобразователях, первоначально реализующих скалярное управление и не имеющих клемм для подключения датчика скорости). Исходя из вида нагрузки на выходе, преобразователи частоты подразделяются по типу исполнения:
- для насосного и вентиляторного привода;
- для общепромышленного электропривода;
- эксплуатируется в составе электродвигателей, работающих с перегрузкой.
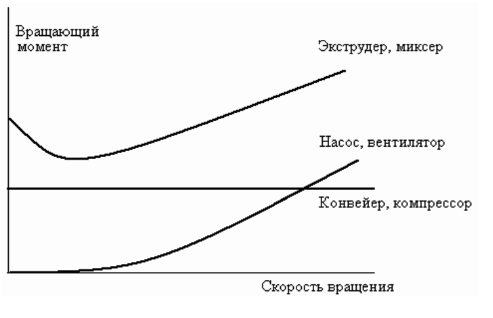
Рисунок 8 – Механические характеристики типичных нагрузок
Современные преобразователи частоты обладают разнообразным набором функциональных особенностей, например, имеют ручное и автоматическое управление скоростью и направлением вращения двигателя, а также встроенный потенциометр на панели управления. Наделены возможностью регулирования диапазона выходных частот от 0 до 800 Гц.
Преобразователи способны выполнять автоматическое управление асинхронным двигателем по сигналам с периферийных датчиков и приводить в действие электропривод по заданному временному алгоритму. Они поддерживают функции автоматического восстановления режима работы при кратковременном прерывании питания. Они выполняют управление переходными процессами с удаленного пульта и осуществляют защиту электродвигателей от перегрузок.
Из уравнения ω0 = 2πf1/p получаем связь между угловой скоростью вращения и частотой питающего тока. При неизменном напряжении источника питания U1 и изменении частоты изменяется магнитный поток асинхронного двигателя. При этом для лучшего использования магнитной системы при снижении частоты питания необходимо пропорционально уменьшать напряжение, иначе значительно увеличатся намагничивающий ток и потери в стали.
Аналогично при увеличении частоты питания следует пропорционально увеличивать напряжение, чтобы сохранить магнитный поток постоянным, так как в противном случае (при постоянном моменте на валу) это приведет к нарастанию тока ротора, перегрузке его обмоток по току, снижению максимального момента.
Рациональный закон регулирования напряжения завит от характера момента сопротивления.
При постоянном моменте статической нагрузки (Mс = const) напряжение должно регулироваться пропорционально его частоте U1/f1 = const. Для вентиляторного характера нагрузки соотношение принимает вид U1/f²1 = const.
При моменте нагрузки, обратно пропорциональном скорости U1/√f1 = const.
На рисунках ниже представлены упрощенная схема подключения и механические характеристики асинхронного двигателя при частотном регулировании угловой скорости.
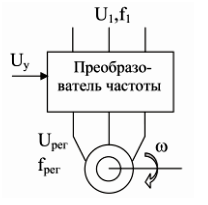
Рисунок 9 – Схема подключения частотного преобразователя к асинхронному электродвигателю
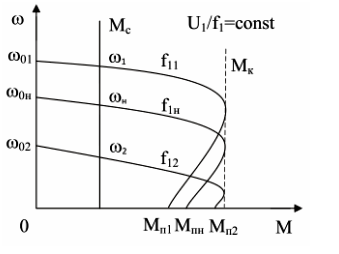
Рисунок 10 – Характеристики для нагрузки с постоянным статическим моментом сопротивления
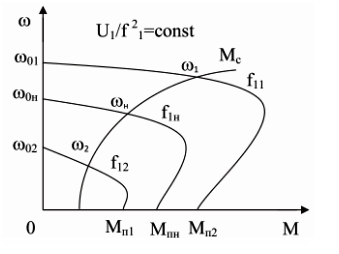
Рисунок 11 – Характеристики для нагрузки вентиляторного характера
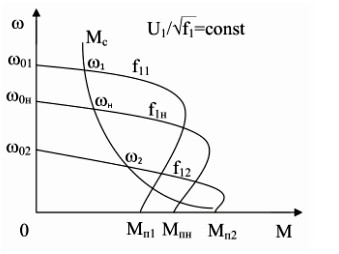
Рисунок 12 – Характеристики при статическом моменте нагрузки обратно пропорциональны угловой скорости вращения
Частотное регулирование скорости асинхронного двигателя позволяет изменять угловую скорость вращения в диапазоне – 20...30 к 1. Регулирование скорости асинхронного двигателя вниз от основной, осуществляется практически до нуля.
При изменении частоты питающей сети верхний предел частоты вращения асинхронного двигателя зависит от ее механических свойств, тем более что на частотах выше номинальной асинхронные двигатель работает с лучшими энергетическими показателями, чем на пониженных частотах. Поэтому, если в системе привода используется редуктор, это управление двигателем по частоте следует производить не только вниз, но и вверх от номинальной точки, вплоть до максимальной частоты вращения, допустимой, по условиям механической прочности ротора.
Частотный способ является наиболее перспективным для регулирования асинхронного двигателя с короткозамкнутым ротором. Потери мощности при таком регулировании невелики, поскольку не сопровождаются увеличением скольжения.[5]
3.3 Cостав стенда
В состав оборудования стенда входят следующие компоненты: бак 125л,электронасос центробежный СP 130(Номинальная скорость вращения nН =2900 об/мин).
Трансформатор TR60 (понижающий трансформатор) – трансформатор с корпусом из термоусадочного пластика, корпус – ударопрочный, негорючий термопластик серого цвета. Крепится на 35 мм рейке стандарта DIN. Трансформатор имеет двойную изоляцию и не требуют защитного заземления. Вторичная обмотка трансформаторов защищена двумя предохранителями[6]
Преобразователь частоты Altivar 312 [7] предназначен для управления асинхронными двигателями мощностью от 0,18 до 15 кВт. Он отличается надежностью и компактностью, простотой ввода в эксплуатацию. Преобразователь Altivar 312 располагает функциями, подходящими для наиболее частых применений, в частности: транспортное оборудование (небольшие конвейеры, электротали и т.д.); фасовочно-упаковочное оборудование; специальные механизмы (мешалки, смесители, текстильные машины и т.д.); насосы, компрессоры и вентиляторы. На рисунке 13 изображен преобразователь частоты Altivar 312.

Рисунок 13 – Преобразователь частоты Altivar 312
Altivar 21 – это преобразователь частоты для управления асинхронными электродвигателями на мощности от 0,75 кВт до 75 кВт. Он специально разработан для наиболее часто встречающихся применений в зданиях обслуживающего сектора: отопление, вентиляция, кондиционирование воздуха и насосы. Благодаря Altivar 212, обеспечивается экономия электроэнергии до 70% [8]. На рисунке 14 изображен преобразователь частоты Altivar 212.

Рисунок 14 – Преобразователь частоты Altivar 212
Еще в оборудование стенда входят: контакторы, электромеханический клапан, автоматические выключатели, AC-DC сетевой преобразователь, датчик давления, наборное поле, панель для построения схемы организации стенды, кнопка Пуск
и кнопка СТОП
. Согласно правил, безопасности кнопка стоп
выполнена грибообразной и яркого красного цвета и т.д.
В лицевую панель входят: переключатели; сигнальные лампы; пакетный переключатель ATV 212/ATV 312; разъемы клемм для подключения.
3.4 Рекомендации по энергосбережению
Процесс регулирования осложняется несоответствием характеристик центробежных насосов и трубопроводов. Чтобы подать увеличенный расход воды по трубопроводу, напор на насосной станции надо увеличивать, а характеристики центробежных насосов таковы, что при увеличении подачи воды напор, развиваемый насосом, падает. В то же время при уменьшении подачи воды напор насоса следовало бы тоже уменьшить, а он увеличивается. Поэтому в периоды уменьшенного водопотребления системы водоснабжения работают с избыточным напором, который гасится в дросселирующих устройствах или в водоразборной арматуре у потребителя. При этом энергия, потребляемая насосами, нерационально расходуется на создание избыточных напоров, под воздействием которых увеличиваются утечки и непроизводительные расходы воды, возникают повышенные механические напряжения в стенках труб. Аналогичные явления имеют место в теплофикационных, оросительных и других системах. Несоответствие в режимах работы насосов и трубопроводов может быть устранено изменением частоты вращения насосов, которая должна регулироваться в соответствии с изменениями водопотребления или притока сточных вод. При уменьшении частоты вращения насоса уменьшается его подача воды и развиваемый им напор. При увеличении частоты вращения напор увеличивается одновременно с увеличением подачи воды. Регулированием частоты вращения насоса его рабочие параметры приводятся в соответствие с режимом работы обслуживаемой системы. Чтобы изменить частоту вращения насоса, необходим регулируемый электропривод. Значение частоты вращения насоса, с которой он должен работать в тот или иной момент времени, определяется системой САУ насосной установки. Требуемое значение частоты вращения устанавливается в зависимости от многих факторов. К ним относятся: расход жидкости в системе, её уровень в резервуарах, значения статического и динамического противодавления, количество параллельно работающих насосов и насосных установок, подающих жидкость в систему, и т. д.
На момент написания данного реферата магистерская работа еще не завершена. Ориентировочная дата завершения магистерской работы: июнь 2018 года. Полный текст работы и материалы по теме могут быть получены у автора или его руководителя после указанной даты.
Список источников
- Центробежный насос // Википедия. – Режим доступа: "https://ru.wikipedia.org/wik...".
- Разинов А.И. Гидромеханические и теплообменные процессы и аппараты химической технологии: учебное пособие /А.И. Разинов, О.В. Маминов, Г.С. Дьяконов. – Казань: изд-воКГТУ, 2007. – 212с.: ил.
- Центробежный насос – схема и принцип работы устройства // Moikolodets – Режим доступа: "https://moikolodets.ru/centrobezhnyj-nasos-shema-368".
- Черкасский В.М. Насосы, вентиляторы, компрессоры: Учебник для теплоэнергетических специальностей вузов. – М.: Энергоатомиздат, 1984.-416 с.: ил.
- Частотное регулирование асинхронного двигателя // Школа для электрика. – Режим доступа: "http://electri...".
- Иванов Г.М., Онищенко Г.Б. Автоматизированный электропривод в химической промышленности. М.: Машиностроение, 1975.-312 с.:ил.
- Altivar 312. Преобразователи частоты для асинхронных двигателей. Руководство по установке. Schneider Electric 01/2010.
- Altivar 21 Привод с регулируемой частотой вращения для асинхронных электродвигателей. Краткое руководство.