Назад в библиотеку
Фильтрация сигналов аналоговых датчиков в системах автоматизированного электропривода
Автор:А. И. Садовский, Д. В. Бажутин
Источник:
Электронный архив Донецкого национального технического университета (г. Донецк)
В работе рассмотрены вопросы фильтрации сигналов аналоговых датчиков с использованием программных средств. На примере датчика ускорения проведён
сравнительный анализ работы стандартных фильтров, реализованных в среде LabView.
С развитием вычислительной и измерительной техники всё более расширяется и усложняется круг задач, выполняемый электромеханическими системами. При
этом качество работы таких систем зависит, в том числе, и от точности измерения регулируемых величин, на которую влияют как погрешности при
изготовлении устройств, так и условия их размещения.
В наибольшей степени подвержены воздействию внешних помех устройства измерения электрических величин. Так, электромагнитные преобразователи
подвержены воздействию внешних полей, что приводит к наложению на измеренный сигнал дополнительных составляющих помех. В отдельных случаях измеряемый
сигнал уже содержит помехи, обусловленные работой силовых преобразовательных устройств. На рис. 1 приведён график сигнала, снятого с
датчика тока на выходе преобразователя постоянного напряжения. использующего принцип широтно – импульсной модуляции.
Кроме того, помеха может возникнуть и при передаче аналогового сигнала вследствие электромагнитной индукции. Применение цифровых датчиков позволяет
существенно снизить влияние данного эффекта, однако, данный подход не всегда возможен. Таким образом, возникает необходимость внедрения
средств фильтрации измеряемых сигналов.
Фильтр представляет собой математическую модель стационарной системы, частотная характеристика которой синтезируется исходя из требований, предъявляемых
к фильтр.
При этом задаются следующими параметрами:
- границы полосы пропускания;
- амплитуда пульсаций в частотной характеристике;
- порядок фильтра.
Пример частотной характеристики фильтра приведён на рис. 2.
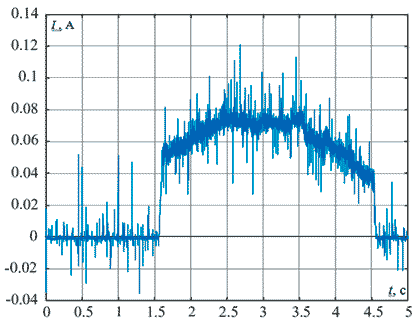
Рисунок 1 – Сигнал аналогового датчика тока.p>
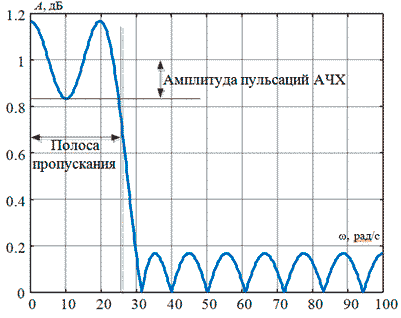
Рисунок 2 – Частотная характеристика фильтра.
С учётом того, что обработка информации выполняется в цифровом виде на микропроцессорных устройствах, синтез фильтров целесообразно проводить в
дискретной форме, дополнительно задаваясь частотой дискретизации.
В рамках данной работы рассматривался проект лабораторного стенда по исследованию упругих колебаний протяжённых механических конструкций. Измерение амплитуды
колебаний осуществляется с помощью аналогового датчика ускорения (акселерометра). Перевода измеренного сигнала в дискретный вид и его дальнейшая
обработка осуществляется с помощью микроконтроллера Arduino Due. В виду специфики данной модели микроконтроллера в качестве среды проектирования фильтров и визуализации
результатов их работы был выбран программный пакет LabView. Схема взаимодействия программной и аппаратной части приведена на рис. 3.

Рисунок 3 – Система передачи информации.
В рамках данной работы был создан инструментарий для исследования работы фильтров Баттерворта, Бесселя, Чебышева
1 – го и 2 – го рода и эллиптических фильтров. На рис. 4 приведена структурная схема созданного виртуального
инструмента, а на рис. 5 – приборная панель.

Рисунок 4 – Структурная схема исследования фильтров.
Поскольку передача информации от микроконтроллера происходит в конкретные моменты времени, все фильтры были синтезированы в дискретном виде. При
проектировании фильтров были приняты такие параметры:

Рисунок 5 – Панель управления и визуализации.
- Частота дискретизации – 500 Гц, задаётся при программировании микроконтроллера.
- Ширина полосы пропускания – от 0 до 20 Гц. Ожидается, что частоты упругих колебаний исследуемой
лабораторной установки будут лежать в диапазоне до нескольких Гц. При этом минимальная частота наводимых в сигнале помех – 50 Гц.
- Порядок фильтра – 4. Чем выше порядок, чем интенсивнее будет спадать частотная характеристика вне полосы пропускания. Учитывая
тот факт, что частоты колебаний достаточно далеко отстоят от частот помех, было принято решение ограничиться этим значением.
- Амплитуда пульсаций в частотной характеристике – 0,05 дБ.
- Ослабление сигнала вне полосы пропускания – 80 дБ.
На рис. 6 приведены полученные графики измеренных и отфильтрованных сигналов.
Анализ результатов показывает, что амплитуда помех значительно уменьшилась, однако фильтрация создаёт дополнительную инерционность в системе. Чем
выше порядок фильтра, тем эта инерционность выше. Особый интерес вызывают результаты работы фильтра Чебышева 2 – го рода. Данный
фильтр показал наилучшее качество подавления помех, однако фазовый сдвиг между измеренным и отфильтрованным сигналом составляет 0,05 с. При использовании
данного фильтра в системах автоматического регулирования с данной инерционностью необходимо считаться.
В дальнейшем планируется оптимизировать параметры каждого из рассмотренных фильтров и обосновать оптимальный вариант фильтрации сигнала имеющегося аналогового акселерометра.

Рисунок 6 – Сравнение измеренных (светлые линии) и отфильтрованных (тёмные линии)
сигналов: а – фильтр Бесселя; б – фильтр Баттерворта; в – фильтр Чебышева
1 – го рода; г – фильтр Чебышева 2 – го рода; д – эллиптический фильтр.
Выводы
При использовании аналоговых датчиков в системах автоматического регулирования электроприводами необходимо предусматривать меры по фильтрации измеряемых сигналов. Для
этой цели можно применять дискретные фильтры, реализуемые программно в микроконтроллере или внешней среде обработки информации. Структура и параметры таких
фильтров выбираются исходя из поставленной задачи и условий работы. Если частота измеряемого сигнала близка по значению к частотам помех, качество фильтрации
существенно снижается. Кроме того, фильтры имеют свою инерционность, которую необходимо учитывать при синтезе систем регулирования.
Перечень ссылок
- Сергиенко А. Б. Цифровая обработка сигналов / А. Б. Сергиенко – СПб. : Питер, 2002. – 608 с.
- Федосов В. П., Нестеренко А. К. Цифровая обработка сигналов в LabVIEW:
учеб. пособие / под ред. В. П. Федосова. – М.: ДМК Пресс, 2007. – 456 с.