
Реферат по теме выпускной работы
Содержание
- Введение
- 1. Актуальность темы
- 2. Цель и задачи исследования, планируемые результаты
- 3. Обзор электромеханических кресел
- 3.1. Зарубежные производители электромеханических инвалидных кресел
- 3.2. Отечественные производители электромеханических инвалидных кресел
- 3.3. Электромеханическое инвалидное кресло-коляска Invacare Strom XS
- 4. Разработка аппаратной части
- 5. Разработка программной части
- Список источников
Введение
Среди изделий, предназначенных для людей с ограниченными физическими возможностями, в особый класс выделяют технические средства, компенсирующие нарушения опорно-двигательной системы человека, например, трости, костыли, протезы нижних конечностей, кресла-каталки и кресла-коляски. Кресло-коляска, в отличие от кресла-каталки, предназначено для управления инвалидом самостоятельно, а не сопровождающим лицом. Кресла-коляски могут иметь механический привод, при котором колёса приводятся в движение силой рук, а также электрический привод, в состав которого входят: аккумулятор, силовой преобразователь, микроконтроллер, устройство ввода и редуктор.
Такие инвалидные кресла предназначены для передвижения не только в помещении, но и на улице, поэтому важно, чтобы в микроконтроллер была заложена удобная и надежная система управления, также предусматривающая отсутствие датчика скорости.
1. Актуальность темы
Проблема помощи людям с ограниченными физическими способностями остаётся одной из самых сложных, требующих от общества не только её понимания, но и участия в этом процессе многих специализированных учреждений и структур. Реабилитацией инвалидов являются не только лечение и улучшение состояние здоровья, но и процесс достижения человеком максимальной самостоятельности в обществе. Одними из приспособлений, наибольшим образом способствующими этому, являются протезы конечностей и электромеханические инвалидные кресла.
2. Цель и задачи исследования, планируемые результаты
Целью магистерской работы является изучение существующих инвалидных кресел-колясок с электроприводом и разработка системы управления электроприводом для электромеханического инвалидного кресла-коляски Invacare Storm XS.
Для достижения поставленной цели необходимо решить следующие задачи:
- Изучить существующие системы электроприводов на современных инвалидных креслах-колясках с электроприводом;
- Выбрать аппаратные составляющие системы (контроллер, силовой преобразователь, датчики, устройство ввода);
- Разработать математическую модель системы регулирования скорости кресла-коляски;
- Разработать исполняемую программу для контроллера;
- Проверить работоспособность реализованной системы.
Планируемые результаты:
- Математическая модель системы регулирования скорости электромеханической инвалидной коляски;
- Рабочая система электропривода в инвалидном электромеханическом кресле-коляске Invacare Storm XS.
3. Обзор электромеханических кресел
Электромеханическое кресло-коляска (ЭМК) предназначено для самостоятельного передвижения в помещении и на улице инвалидов с нарушением функций верхних и нижних конечностей. Оно приводится в движение электроприводом. ЭМК может быть дополнено такими различными функциями, как наклон всего кресла, наклон спинки, подъем сидения и другими полезными или необходимыми для здоровья функциями.
Коляски с электроприводом классифицируют по ведущим колёсам: с задней, передней, центральной осями либо всеми четырьмя ведущими колёсами. Каждый тип обладает своими характеристиками движения. Также ЭМК отличаются типом сидения: одни выглядят как обычные сидения инвалидных колясок, а другие похожи на автомобильные сидения.
Конструкция ЭМК обладает широким спектром моделей, от маленьких переносимых колясок, которые могут быть сложены или разобраны, до очень больших и тяжелых с полным набором функций (такие обычно называют реабилитационными креслами).
Пользователь обычно управляет скоростью и направлением с помощью джойстика, подключенного к контроллеру и расположенного на одном из подлокотников в зависимости от того, какой рукой человеку предпочтительнее управлять коляской. В случае невозможности управления с помощью рук, могут использоваться другие устройства ввода, например, устройство для управления коляской с помощью подбородка.
Сначала инвалидные кресла разрабатывались без учета возможности их транспортировки, поэтому было очень тяжело их разбирать. На сегодняшний день, многие ЭМК транспортабельны, а некоторые очень просты в разборке. С растущими запросами пользователей появились ЭМК одинаково приспособленные как для уличного использования, так и для домашнего.
3.1. Зарубежные производители электромеханических инвалидных кресел
Крупнейшими зарубежными производителями электромеханических инвалидных кресел считаются Invacare Corp., Permobil AB и Pride Mobility Products Corp.
Invacare – крупнейшая компания по производству медицинской техники и реабилитационного оборудования во всем мире. Качество продукции и ее соответствие конкретным требованиям людей с ограниченными возможностями позволили компании завоевать лидирующие позиции на многих рынках.
Invacare обладает широкой линейкой инвалидных колясок с ручным и электрическим управлением. Их продукция характеризуется функциональностью, качеством, надежностью и безопасностью. Invacare не раз удостаивалась наградами за исследовательскую и инновационную деятельность.

Электрические коляски Invacare работают за счет аккумуляторных батарей и способны преодолевать от 23 до 42 км, в зависимости от модели и дополнительных опций. Аккумуляторы заряжаются от обычной розетки. За расходом батарей позволяет следить светодиодный индикатор заряда.
Высота препятствий, преодолеваемых электрическими колясками Invacare варьируется от 10 до 60 мм (коляска увеличенной проходимости). Скорость передвижения от 6 до 10 км/ч, но при этом важно помнить, что тормозной путь коляски составляет 1 м, что особенно актуально при домашнем использовании. Следует тщательно следить за зарядом батарей, это можно делать с помощью специального светодиода, расположенного около кнопки включения. Когда заряд кончится, коляску можно использовать как транзитную. Минимальный радиус разворота придает креслу-коляске маневренность и проходимость.
Более 45 лет компания Permobil занимает одно из лидирующих позиций в индустрии электромеханических кресел. Эта компания характеризуется большим количеством инноваций и влиянием в развитии решений для инвалидов.
Производимые компанией инвалидные кресла с электроприводом делятся на две большие группы: для уличного пользования и для домашнего. Их продукция для уличного использования сильно отличается от обычных электрических кресел. Эти мощные электромеханические кресла могут безопасно доставить пользователя далеко от ровной дороги. Они оснащены мощными электродвигателями, энергоёмкой подвеской и объемными аккумуляторами, что обеспечивает пользователю длительную и плавную поездку на скорости до 15 км/ч. Система улучшенного управления (Enhanced Steering Perfomance) делает уличные модели инвалидных кресел Permobil одними из лучших для движения как по дороге, так и вне её.

Подобные модели могут перевозить людей весом до 136 кг, могут проходить от 30 до 45 км от одного заряда при максимальной скорости до 15 км/ч. Также они могут преодолевать препятствия высотой до 110 мм и имеют радиус разворота 1680 мм. Для комфорта пользователя кресло обладает системой наклона кресла целиком и отдельно сидения и спинки.
Модели для домашнего пользования более маневренны. Комбинация удобства пользования, современного дизайна и комфорта делает эти модели пригодными не только для домашнего пользования, но и для уличного использования на ровном дорожном покрытии. Ими легко управлять в замкнутых пространствах, а мощные двигатели в сочетании с продвинутой базой дают электрокреслу хорошую производительность на улице. Такие модели являются универсальным выбором для большинства случаев.
Pride Mobility Products является одним из ведущих в мире разработчиков и производителей мобильных средств передвижения для малоподвижных людей. Продукты этой компании тщательно спроектированы и испытаны, содержат технологически инновационные функции для удобства пользователя.
Электроколяски этой компании обладают маленьким весом и очень высокой маневренностью, что делает их удобными для повседневного использования как внутри помещения, так и на улице на ровном покрытии.

Jazzy Select 6 обеспечивает максимальную стабильность в сочетании с преимуществами переднего привода. Подвеска Active-Trac и 6-дюймовые передние и задние колеса обеспечивают хорошую производительность в закрытом помещении и на улице. Широкий выбор стандартных удобных функций делают эту инвалидную коляску простой для использования.
3.2. Отечественные производители электромеханических инвалидных кресел
Среди отечественных производителей не такой большой выбор инвалидных кресел с электроприводом. Крупнейшими отечественными производителями таких кресел являются компании Мега-Оптим
и Ortonica
.
Компания Мега-Оптим
является признанным российским производителем и поставщиком технических средств реабилитации инвалидов. Среди предлагаемых товаров преобладают небольшие складывающиеся инвалидные кресла с электроприводом, рассчитанные для передвижения как в помещении, так и на улице. Они оснащены откидными подлокотниками, амортизаторами и антиопрокидывателями. Некоторые модели снабжены вертикализаторами, а некоторые наоборот могут принимать горизонтальное положение. Однако минусом этих электрокресел является их относительно большой вес (от 40 до 65 кг), что снижает их грузоподъемность и дальность хода от одного заряда
В основу создания компании Ortonica
легла идея обеспечения комфортной среды для людей, имеющих особенные потребности. Каждое их изделие проходит долгий период разработки, тестовые испытания и соответствует российским стандартам качества. Их изделия отличаются от электроколясок Мега-Оптим
более современных дизайном и наличием в некоторых моделях привода передней оси, а не задней.

Ortonica
Также они имеют более высокую грузоподъемность и больший запас хода от одного заряда, однако развивают скорость до 5 км/ч, что ниже, чем у большинства моделей других производителей. Они могут проходить препятствия высотой до 5 см и снабжаются ремнями безопасности, что делает их хорошо приспособленными для уличного использования.
Интересной разработкой для инвалидных кресел активного типа является устройство Una Wheel (рисунок 5), позволяющее прикрепить к инвалидному креслу приводное колесо.

Устройство Una Wheel представляет собой мотор-колесо мощностью 350 Вт, рама которого крепится к инвалидному креслу спереди. Оно подходит для большинства кресел-колясок активного типа (с несъёмными подножками). Монтаж не требует помощи ассистента и занимает около 30 секунд. Небольшой вес в совокупности с ёмкой аккумуляторной батареей позволяет проехать до 35 км на одном зарядке при массе пользователя до 100 кг.
3.3. Электромеханическое инвалидное кресло-коляска Invacare Strom XS
Целью дипломной работы является разработка системы управления электрическим инвалидным креслом Storm XS компании Invacare (рисунок 6). Это одна из первых моделей серии. Это кресло-коляска комбинированного типа (подходит как для передвижения в закрытом помещении, так и для уличного использования) с индивидуальным приводом задних колёс.

В качестве двигателей используются коллекторные моторы-редукторы GP8040SB-SRG1 постоянного тока мощностью 350 Вт с номинальным напряжением 24 В, номинальным током 14 А и номинальной скоростью 4000 об/мин. Передаточное число редуктора равно 25,1, а диаметр ведущих колёс составляет 36 см. В комплекте имеется две аккумуляторные батареи номинальным напряжением 12 В каждая и ёмкостью 40 А⋅ч. Это кресло-коляска удобно тем, что подлокотники и подножка регулируются по высоте, также имеется амортизация задних колёс. К двигателям прикреплены электромагнитные тормоза с номинальным усилием 2,2 Н⋅м. Вес кресла-коляски составляет около 70 кг без аккумуляторов и 103 кг с аккумуляторами. Номинальная грузоподъемность – 110 кг.
4. Разработка аппаратной части
Для реализации системы управления имеющимся электромеханическим инвалидным креслом-коляской, необходимо дополнить систему недостающими элементами: микроконтроллером, задающим устройством и силовой частью (драйвером для H-моста). Также для обеспечения хорошего качества управления, необходимо дополнить систему датчиками тока и скорости для их регулирования. Регулирование тока обеспечит качественные переходные процессы и ограничение тока, что приведет к меньшей скорости разряда аккумуляторов. Регулирование скорости обеспечит синхронизацию скоростей колёс при неравномерной нагрузке на них и плавные пуск и торможение кресла-коляски.
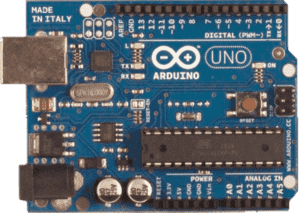
В качестве микроконтроллера был выбран микроконтроллер Arduino Uno R3, показанный на рисунке 7. В его состав входят: 14 цифровых входов/выходов (из них 6 могут использоваться в качестве ШИМ-выходов), 6 аналоговых входов, кварцевый резонатор на 16 МГц, разъем USB, разъем питания и кнопка сброса. Для начала работы с устройством достаточно просто подать питание от AC/DC-адаптера или батарейки, либо подключить его к компьютеру посредством USB-кабеля. Тактовой частоты 16 МГц вполне хватит для вычислительных операций рабочего алгоритма, а количества входов/выходов достаточно для подключения всех необходимых периферийных устройств, что в совокупности с невысокой стоимостью платы, делает этот микроконтроллер хорошим выбором для дипломной работы.
В качестве задающего устройства был выбран двухосевой джойстик KY-023, имеющий два 5 В аналоговых выхода (по одному на ось) и один цифровой выход для тактовой кнопки. Данный джойстик прост в подключении и удобен в использовании.
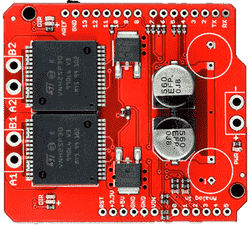
В качестве силового преобразователя была выбрана плата Monster Moto Sheild VNH2SP30 (рисунок 8), где VNH2SP30 – это название мостового драйвера для мощных коллекторных двигателей постоянного тока. Этот драйвер рассчитан на двигатели с номинальным напряжением до 41 В и током до 30 А. В качестве ключей в нём используются транзисторы типа MOSFET производства STMicroelectronics, которые поддерживают управление с помощью ШИМ частотой до 20 кГц. Особенностью таких драйверов является наличие встроенного датчика тока, выходом которого является токовый сигнал, пропорциональный току двигателя. Сама плата специально разработана для Arduino Uno, что значительно упрощает её использование в данном случае.
В качестве датчика тока планировалось использовать встроенный в драйвер датчик, однако из-за производственного брака лишь один драйвер имеет рабочий датчик тока, поэтому было принято решение использовать внешние датчики тока ACS758. Выбранная модель LCB-050B является биполярным датчиком, может измерять до 50 А и имеет на выходе сигнал напряжения 40 мВ/А. Поскольку датчик биполярный, необходимо заметить, что выходной сигнал при нулевом токе будет равен половине напряжения питания и от этого значения будет происходить отсчет. Был выбран именно этот датчик, потому что он прост в использовании, является биполярным и покрывает весь необходимый диапазон токов.
Для создания двухконтурной системы регулирования скорости не обойтись без измерения скорости двигателя, однако возможности подключения датчика скорости нет, поэтому было принято решение использовать косвенное измерение скорости через ЭДС двигателя. Этот метод не требует большого количества подключений, имеет несложный алгоритм, однако накладывает некоторые ограничения на систему. Поскольку измерение ЭДС возможно только при закрытых транзисторах верхнего плеча, угол открытия ШИМ не может составлять 100%, чтобы обеспечить возможность получения величины ЭДС. Это несколько снизит максимальную скорость (около 2%), однако метод даст необходимую точность вычисления скорости двигателя при достаточной частоте ШИМ.
Разработка программной части
В качестве системы управления электроприводом была выбрана двухконтурная система управления скоростью с обратной связью через ЭДС двигателя. Использование контура тока позволит ограничить величину тока, что обезопасит элементы платы, а также уменьшит скорость разряда аккумуляторов. Контур скорости позволит пользователю легко управлять движением кресла-коляски, обеспечит плавность режимов пуска и торможения, а также убирает необходимость в реализации синхронизации скоростей колёс, что было бы одним из важнейших пунктов при разомкнутой системе. Функциональная схема системы представлена на рисунке 9. На ней представлены следующие блоки: ЗИ – задатчик интенсивности; РЭ – пропорционально-интегрально-дифференциальный регулятор ЭДС; РТ – пропорционально-интегральный регулятор тока; АКБ – аккумуляторная батарея; ДТ – датчик тока; ДН – датчик напряжения; ВС – вычислитель скорости.
На задатчик интенсивности приходит сигнал задания скорости с устройства задания, в данном случае это двухосевой джойстик. Задатчик интенсивности необходим для обеспечения плавных режимов пуска и торможения двигателя. От сигнала задатчика интенсивности вычитается вычисленный сигнал скорости. Процесс вычисления скорости через ЭДС описан ниже. Сигнал рассогласования подается на ПИД-регулятор ЭДС, выходом которого является сигнал задания тока. От него отнимается сигнал тока, полученный с датчика тока, и полученное значение подаётся на ПИ-регулятор тока. Выходом регулятора тока будет сигнал управления ШИМ, который подается на силовой преобразователь Monster Moto Shield.
Процесс вычисления скорости через ЭДС двигателя выходит из уравнений (1) и (2).
 |
(1) | |
 |
(2) |
где U – напряжение питания, В; Eя – ЭДС двигателя, В; Iя – ток якоря двигателя, А; RΣ – суммарное сопротивление якоря, Ом; C – конструктивная постоянная двигателя; ω – угловая скорость вращения двигателя, рад/с
Для вычисления конструктивной постоянной двигателя, необходимо сначала вычислить номинальную ЭДС двигателя. Когда ротор двигателя вращается, ЭДС, наводимая в обмотке, работает против напряжения питания, также нужно учитывать падение напряжения на обмотке. Таким образом, номинальную ЭДС можно вычислить по формуле (3).
 |
(3) |
После этого, используя формулу (2), можно вычислить конструктивную постоянную двигателя, C. Далее, зная конструктивную постоянную, можно вычислить скорость двигателя, измерив ЭДС, сняв значение напряжения с клемм двигателя, когда ключи верхнего плеча драйвера закрыты и отняв от этого значения падение напряжения на обмотке и умножив полученное значение на конструктивную постоянную.
Особенностью такого метода является то, что снимать напряжение с обмоток для определения ЭДС двигателя нужно только в те моменты, когда на него не подаётся напряжение, то есть, когда ключи полупроводников верхних плеч H-моста находятся в закрытом состоянии. Это несколько усложняет алгоритм управления тем, что необходимо синхронизировать работу АЦП микроконтроллера с ШИМ-сигналом, подаваемым на ключи. Также, такой подход к управлению скоростью накладывает некоторые ограничения на ШИМ-сигнал:
- Угол открытия ШИМ не может составлять 100%, чтобы дать возможность замерять величину ЭДС двигателя;
- Частота ШИМ должна быть не менее 2 кГц, чтобы обеспечить достаточную точность вычисления скорости.
Также необходимо учесть, что измеряемая ЭДС двигателя является сигналом напряжения и после прохождения делителя напряжения станет значительным влияние шумов на этот сигнал. Чтобы избавиться от шумов, тем самым улучшив качество регулирования, необходимо установить RC-цепочку параллельно снимаемому напряжению. Она будет служить фильтром низких частот. Частоту среза рекомендуется настраивать в таком случае на 700-1000 Гц, выбрав соответствующим образом значения сопротивления резистора и ёмкости конденсатора.
Для повышения точности вычисления скорости можно использовать среднее значение вычисленной скорости за несколько периодов ШИМ. Это важно при использовании ПИД-регуляторов скорости.
Список источников
- Electric Wheelchairs: Types & Reviews of Powerchairs. Режим доступа:
Disabled World
- Инвалидная коляска. Материал из Википедии – свободной энциклопедии. Режим доступа:
ru.wikipedia.org
- Инвалидные коляски и пути их совершенствования. Режим доступа:
www.metodolog.ru
- Оффициальный дистрибьютор Invacare в Украине. Режим доступа:
invacare.kiev.ua
- Permobil General Product Info. Режим доступа:
www.permobil.com
- Официальный дилер завода по разработке и сборке американских мобильных скутеров Pride Mobility для малоподвижных людей в России. Режим доступа:
mobilityscooter.ru
- Компания
Мега-Оптим
– технические средства реабилитации. Режим доступа:www.mega-optim.ru
- Компания
Ортоника
– технические средства реабилитации. Режим доступа:store.ortonica.ru
- Микроконтроллер Arduino Uno, общие сведения. Режим доступа:
arduino.ua
- Ипанов Дмитрий Александрович –
Компенсация и облегчение воздействия сопровождающего лица при управлении инвалидным креслом с электроприводом
– Реферат по теме магистерской работы. Режим доступа:masters.donntu.ru
- VNH2SP30-E Driver Data Sheet. Режим доступа:
www.pololu.com
- ACS758xCB Current Sensor Data Sheet. Режим доступа:
www.allegromicro.com
- AB-021: Measuring RPM From Back EMF. Режим доступа:
www.precisionmicrodrives.com
- Сайт компании UNA Wheel. Режим доступа:
unawheel.ru
- Усольцев А.А. Общая электротехника: Учебное пособие. – СПб: СПбГУ ИТМО, 2009. – 301 с.
- Анучин А.С. Системы управления электроприводов: учебник для вузов. – М.: Издательский дом МЭИ, 2015. – 373 с.