Введение
В настоящее время в мире наблюдается тенденция активного внедрения средств автоматизации и различных инновационных технологий во все сферы человеческой деятельности. В большой мере технический прогресс коснулся области здравоохранения и медицины, в которые ведущие страны мира в последние десятилетия инвестируют значительные средства. Одним из приоритетных направлений в этой области является разработка и усовершенствование средств ухода для людей с ограниченными физическими возможностями, способность к самостоятельному передвижению которых ограничена. В частности, во многих лабораториях мира ведутся работы по созданию роботов в виде инвалидных кресел. Использование искусственного интеллекта в них позволяет облегчить управление ими [6].
1. Объект исследования
Инвалидное кресло с электроприводом Invacare Storm XS, с двумя ведущими независимыми колёсами, каждое из которых приводятся в движение двигателем постоянного тока.
2. Постановка и цель работы
Инвалидное кресло с электроприводом является сложной управляемой электромеханической системой, состоящей из ходовой части и многоуровневой системы управления движением. В нём одновременно протекают механические процессы – движение кресла, и информационные процессы – обработка сигналов измерительных устройств и формирование управляющих сигналов. Модель инвалидного кресла рассматривается как нелинейный динамический объект.

Рисунок 1 – Инвалидное кресло с электроприводом Invacare Storm XS
Управление инвалидным креслом с электроприводом, в большинстве случаев, осуществляется двумя способами: либо при помощи джойстика, либо сопровождающим лицом, которое также называют третья персона. В данной работе рассматривается второй способ, о котором в дальнейшем будет идти речь.
При управлении третьей персоной инвалидное кресло будет двигаться согласно закону движения, который воспроизводится сопровождающим лицом на основании восприятия информации об окружающем мире и субъективной моторики. Человек генерирует желаемую траекторию, основываясь на различной информации об окружающей среде, а передать информацию о желаемой траектории он может тактильно, через величину прикладываемого усилия на ручки управления креслом.
Основным неудобством при управлении третьей персоной является большая масса кресла-каталки. Так, например, масса исследуемого кресла Invacare Storm XS составляет около 70 кг, вместе с аккумуляторами – 103 кг. Также следует учитывать тот факт, что в кресле будет находиться человек, что в совокупности делает управление креслом очень сложным и неудобным.
Цель работы – на базе аппарата искусственных нейронных сетей (ИНС) разработать способ управления инвалидным креслом, облегчающий воздействие со стороны сопровождающего лица и компенсирующий прикладываемые им усилия к креслу.
3. Принцип и краткое описание работы
Для приведения в движения кресла–каталки сопровождающим лицом прикладывается некоторое усилие, которое измеряется при помощи тензорезистивных датчиков, расположенных на ручках управления креслом. Принцип действия таких датчиков основан на изменении их сопротивления в зависимости от деформации конструкции, на которой они закреплены, с дальнейшим преобразованием в пропорциональный электрический сигнал. Таким образом можно измерить значение силы, прикладываемой третьей персоной к креслу. Полученный сигнал будет очень маленьким по амплитуде, поэтому его необходимо усилить при помощи тензометрического усилителя, схема которого представлена на рис.2 (в данной работе используется усилитель, разработанный аспирантами В.Н. Хоменко и А.А. Мельником, с коэффициентом усиления 500 и питающийся от двух батареек «Крона» напряжением в 9 В).
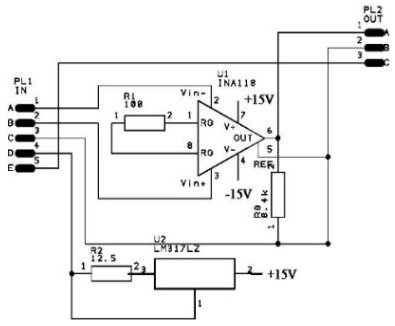
Рисунок 2 – Электрическая схема тензометрического усилителя на базе микросхемы Ina118
Сигнал с тензодатчиков является аналоговым сигналом. Полученный сигнал поступает на джойстик, где происходит его преобразование в цифровой сигнал. Цифровой сигнал – это дискретный сигнал по уровню и времени, причём число дискретных значений уровней у него конечно. Так как в этом случае уровни дискретного сигнала можно пронумеровать числами с конечным числом разрядов, то такой дискретный сигнал называется цифровым.
Усиленный и оцифрованный сигнал поступает на микроконтроллер, в составе которого будет находиться нейронная сеть в виде программы. В таком случае нейронная сеть должна выполнять функции нейроконтроллера, а именно на основе полученных данных сформировать управляющий сигнал на исполнительные приводы, тем самым корректируя воздействия сопровождающего лица.
4. Проблемы и методики их решения
Задачу проекта можно рассматривать, как задачу адаптивного нейроуправления нелинейным динамическим объектом в режиме реального времени. Её особенность состоит в отсутствии точных знаний о математической модели объекта управления, будь то дифференциальные уравнения или плотности вероятностей случайных внешних воздействий. В задачах нейроуправления для представления объекта управления используют модель «черного ящика», в котором наблюдаемыми являются только текущие значения входа и выхода. При этом состояние самого объекта считается недоступным для внешнего наблюдения. Цель системы управления (СУ) состоит в том, чтобы уже в процессе функционирования определить закон регулирования, обеспечивающий оптимальное поведение объекта. Для решения этой задачи в дополнение к основному контуру в систему управления вводится контур адаптации [3].
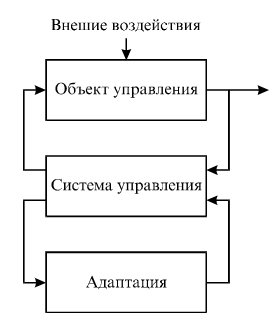
Рисунок 3 – Общая схема адаптивной системы управления
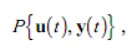
На рис.4 представлена некоторая динамическая система (объект управления). В адаптивной постановке задачи объект управления описывается своей функциональной моделью ([3], стр. 45):
которая связывает вектор входных воздействий u(t) с вектором выходных сигналов y(t). Такое описание берет свое начало от идеи «черного ящика» и не является портретом динамического поведения объекта, а отражает только его функциональные связи.
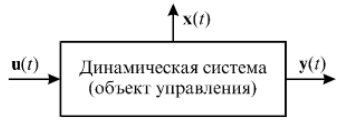
Рисунок 4 – Представление динамической системы в адаптивной теории управления
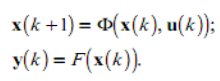
Динамику поведения объекта управления можно представить в дискретном виде ([3], стр. 46):
где х(k) – значение вектора состояния объекта на k-м такте; u(k) – значение вектора управления; y(k) – значение выхода объекта управления; Ф и F – векторы функций статических нелинейных преобразований.
Данное уравнение представляет динамику системы, как преобразование «вход-выход».
Использование искусственных нейронных сетей позволяет решать задачу управления нелинейным динамическим объектом путем создания адаптивной системы управления с обучаемым нейроконтроллером.
Здесь под обучением подразумевается процесс выработки в системе управления желаемой реакции на внешние сигналы путем многократных воздействий на систему и внешней корректировки. Под внешней корректировкой понимают контролируемое обучение, при котором известна желаемая реакция нейроконтроллера на определённые воздействия ([3], стр. 49).
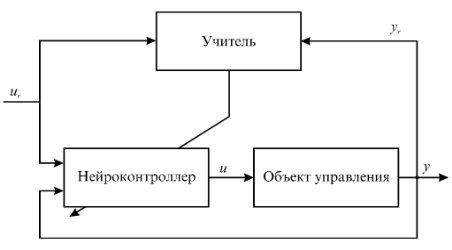
Рисунок 5 – Cистема управления с обучаемым нейроконтроллером
При адаптации обучение используется для получения информации о состоянии и характеристиках системы управления, необходимой для оптимального управления в условиях неопределенности внешней среды.
Существует множество подходов к применению нейронных сетей в качестве нейроконтроллеров. При управлении нелинейными динамическими объектами преимущество имеют рекуррентные нейронные сети (РНС). Наличие обратных связей и элементов временной задержки придает таким сетям собственные нелинейные динамические свойства, что также сказывается на их способности к обучению. Одним из главных применений РНС являются нейроэмуляторы динамических объектов, т.е. их нейросетевые модели, которые обучаются моделировать динамику объекта управления. Но использование рекуррентных нейронных сетей для задач управления нелинейными динамическими объектами вызывает также определенные трудности. К основным недостаткам традиционных рекуррентных нейронных сетей, затрудняющим их применение, следует отнести низкую скорость обучения, основанного на процедуре обратного распространения ошибки, и сложность обеспечения устойчивости, связанную с отсутствием аналитических методов исследования устойчивости нелинейных динамических систем.
Преодолеть эти недостатки можно при помощи нейронных эхо сетей, характерной особенностью которых является использование «вычислительного резервуара» [1].
Понятие вычислительный резервуар впервые было предложено Вольфгангом Массом и Гербертом Эгером в 2001 году под названием Liquid-state machine и Echo state network. Структурная схема вычислительного резервуара представлена на рисунке 6.
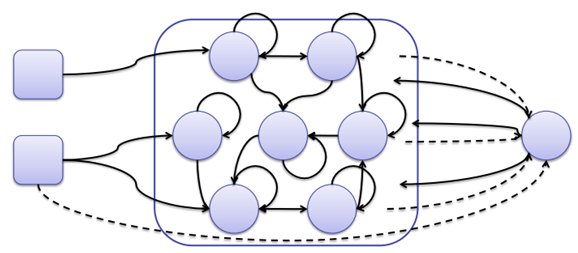
Рисунок 6 – Структурная схема вычислительного резервуара
В общем виде, вычислительный резервуар – это рекуррентная нейронная сеть, весовые коэффициенты и синаптические соединения в которой распределены случайным образом (как правило, с 1% связностью); они задаются один раз при инициализации сети и не изменяются в процессе её функционирования. Вычислительный резервуар служит для распространения и стабилизации сигналов нейронов входного слоя и передачи их комбинированных сигналов на выходной слой сети. Главное преимущество вычислительного резервуара перед нейронными сетями с временной задержкой – большая совокупность динамического отображения «вход-выход».
Архитектура нейронной эхо сети представлена на рис. 7. Сеть содержит входной слой, скрытый слой, охваченный обратными связями и называемый также «динамическим резервуаром», и выходной слой, считывающий информацию из скрытого слоя. Основная особенность нейронных эхо сетей заключается в том, что настраиваемыми являются только синаптические веса выходного слоя [7].
Анимация: 6 кадров, длительность каждого кадра – 50 мс, 63.6 Кб
При подаче на вход такой сети некоторого сигнала он фиксируется во входном слое. Затем производится несколько итераций в скрытом слое сети, пока его выходные сигналы не стабилизируются. При этом в скрытом слое наблюдаются ослабленные по амплитуде образы предыдущих состояний сети u(n), u(n-1), …, откуда и произошло название «эхо сеть» (echo-state network). Настройка синаптических весов и формирование желаемого сигнала производится в выходном слое нейронной сети.
Рис.8 графически противопоставляет классический метод рекуррентных нейронных сетей и подход с использованием вычислительного резервуара ([7], стр. 129).
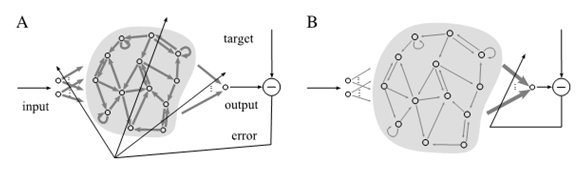
Рисунок 8 – А – Классическое обучение рекуррентной нейронной сети методом градиентного спуска настраивает весовые коэффициенты во всех слоях сети; В – Настройка весов в вычислительном резервуаре происходит только в выходном слое
Такое разделение позволяет избежать недостатков традиционных рекуррентных нейронных сетей и обеспечивает высокую скорость обучения.
При использовании нейронной эхо сети для задачи управления нелинейным динамическим объектом, скрытый слой сети выполняет функцию нейроэмулятора, который обучается моделировать динамику объекта управления, а выходной слой сети – функцию нейроконтроллера, который формирует управляющие сигналы.
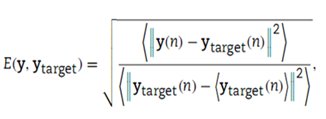
Обучение нейроконтроллера происходит в реальном времени (в режиме on-line). В случае, когда u(n) и ytarget(n) – дискретные сигналы, задача обучения состоит в изучении функции y(n) = y(…, u(n-1), u(n)), из условия чтобы функция ошибки E(y, ytarget) сводилась к минимуму. В качестве функции ошибки обычно используют нормализованную среднеквадратичную ошибку:
Для обучения выходного слоя нейронной эхо сети может быть применен популярный метод обратного распространения ошибки.
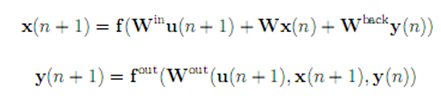
Значение состояний сигналов в скрытом и выходном слоях сети вычисляются соответственно [4]:
где f = (f1, … , fN) – функция активации нейронов скрытого слоя (как правило, сигмоидальная функция); Win, W, Wback, Wout – матрица весовых соединений входного слоя, скрытого слоя, весов обратных связей нейронов скрытого слоя и весовые коэффициенты выходного слоя; fout – функция активации нейронов выходного слоя.
Таким образом, можно сделать вывод, что нейронная эхо сеть может быть применена для решения задач управления инвалидным креслом с электроприводом в режиме реального времени, обеспечивая высокое качество управления при достаточно большой скорости обучения.
Выводы и дальнейшие этапы работы
В момент написания реферата магистерская работа находится в стадии разработки. Окончательное завершение работы состоится в декабре 2012 года. На данном этапе работы я занимаюсь установкой тензорезистивных датчиков для проведения эксперимента по получению наиболее точного сигнала при управлении инвалидным креслом с электроприводом сопровождающим лицом. На основе значений полученных сигналов я собираюсь сформировать выборку, которая будет использована для обучения нейронной сети.
Дальнейшие этапы и последовательность выполнения работы
- Моделирование нейронной сети в программной среде Matlab, обучение нейронной сети на основе полученных данных, тестирование сети и дальнейшее её применение для управления инвалидным креслом с электроприводом;
- Создание нейроконтроллера на базе платы Arduino, написание программы-контроллера, тестирование контроллера на инвалидном кресле Invacare Storm XS;
- Анализ полученных результатов.
|