
Abstract
IntroductionActuellement il y a une tendance de l'intervention active des moyens d'automatisation et des diverses technologies innovatives dans tous les domaines de l'activité de l'humaine. Dans une large mesure le progrès technique a touché le domaine de la santé publique et de la médecine. L'une des priorités dans ce domaine est le développement et l'amélioration des soins pour les personnes handicapées, la capacité de déplacer de façon indépendante est limitée. En particulier, dans de nombreux laboratoires du monde les chercheurs travaillent sur construction des robots sous forme du fauteuil roulant. L'utilisation d'intelligence artificielle permet de faciliter la commande par l'objet á structure complexe [6]. 1. Objet d'étudeUn fauteuil roulant électrique du modèle Invacare Storm XS, avec deux roues principales indépendantes, chacune de qui est mis en marche par un moteur á courant continu. 2. Objectifs du travailLe fauteuil roulant est le système complexe électromécanique comprenant le train de roulement et le système de commande aux mouvements á plusieurs niveaux. Dans lui passent simultanément les processus mécaniques – le mouvement du fauteuil, et les processus d'information – le traitement des signaux des installations de mesure (les capteurs) et la formation des signaux du commande. Le modèle du fauteuil roulant électrique on examine comme l'objet non linéaire dynamique. 
Figure 1 – Fauteuil roulant électrique Invacare Storm XS La commande du fauteuil roulant électrique, dans la plupart de cas, se réalise par deux moyens: ou á l'aide du joystick, ou la personne accompagnant, qui s’appellent d'habitude une tierce personne. Dans ce travail on examine le deuxième moyen, sur qui il y aura par la suite des paroles. A la commande par une tierce personne le fauteuil roulant avancera en vertu de la loi du mouvement, qui se reproduire par la personne accompagnant, en vertu de la perception de l'information sur le monde environnant et la motricité subjective. La personne génère la trajectoire désirée á la base de l'information perceptive du milieu. Ensuit, la personne transmet l'information de la trajectoire désirée par voie tactile au fauteuil roulant. C'est la valeur de l'effort appliqué aux leviers de commande qui determine le trajectoire du mouvement réel du fauteuil roulant. L'inconvénient principale de la commande par une personne c'est une grande masse du fauteuil roulant motorisé. Ainsi, par exemple, la masse du fauteuil éxaminé du modèle Invacare Storm XS est égal 70 kg environ, la masse complete avec les accumulateurs – 103 kg. Il faut prendre en compte aussi le fait que dans le fauteuil il y aura une personne que fait au total la commande du fauteuil très difficile et incommode. But du travail – sur la base de l'appareil des réseaux neurones artificielles élaborer la méthode de la commande du fauteuil roulant électrique pour faciliter l’action par une tierce personne. 3. Principe et description brève du travailPour la mise en action du fauteuil roulant la personne accompagnante fait un certain effort, lequel est mesurè á l'aide des jauges des contraintes. On les disposent sur les leviers de la commande par fauteuil roulant. Le principe du fonctionnement des ces capteurs consiste á une variation de leur résistance ohmique en fonction de la déformation d'une construction, sur laquelle ils sont fixés. Ainsi on peut mesurer la valeur de la force laquelle est appliquée par une tierce personne au fauteuil roulant. L'amplitude du signal reçu nécessite de l'adaptation á l'aide de l'amplificateur extensométrique. Le schéma de ce apareil est présenté sur la fig.2 (Dans ce travail on utilise de l'amplificateur élaboré par les doctorants Khomenko V. et Melnik A. Les données techniques: le facteur d'amplification 500 ; alimentation bipolaire 9 V). 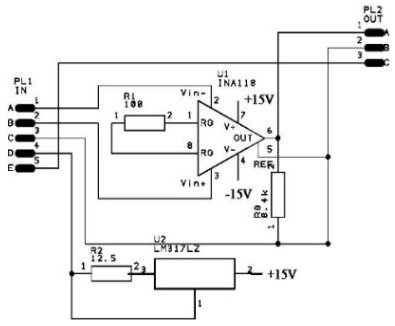
Figure 2 – Schéma de l'amplificateur extensométrique sur la base du micromontage Ina118 Le signal des jauges des contraintes est le signal analogique. Le signal reçu s'achemine sur le joystick, où il y a sa transformation en le signal numérique. Le signal numérique est un signal discontinu selon le niveau et le temps, et en outre le nombre des valeurs discontinues des niveaux chez lui est finale. Puisque dans ce cas on peut numeriser les niveaux du signal discontinu par les nombres avec le nombre fini des catégories, un tel signal discontinu s'appelle numérique. Le signal amplifié et numérique s'achemine sur le microcontrôleur, dans la composition de qui se trouvera le réseau neurone en forme du programme. Dans un tel cas le réseau neurone doit exercer les fonctions du contrôleur neuronal, á savoir á la base des données reçu former le signal de commande sur les entraînement exécutives, en corrigeant alors des actions par une tierce personne. 4. Problèmes posé et méthodes de leurs resolution
Dans le cas general on peut examiner le problème du projet, comme le problème du neurocontrôle adaptif par l'objet non linéaire dynamique en régime du temps réel (on-line). Cette particularité comprend dans l'absence des connaissances précises sur le modèle mathématique de l'objet de la commande, que ce soit les équations différentielles ou les densités des probabilités des influences accidentelles extérieures. Dans les problèmes du neurocontrôle pour la représentation de l'objet de la commande utilisent le modèle de 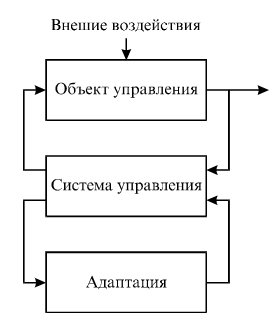
Figure 3 – Schèma principal du système de commande adaptive Sur la fig. 4 on présente un certain système dynamique (l'objet de la commande). Dans l'organisation adaptive du problème l'objet de la commande est décrit par le modèle fonctionnel ([3], p. 45): 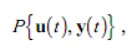
qui lie le vecteur des influences d'entrée u(t) au vecteur des signaux de sortie y(t). Une telle description prend source de l'idée de 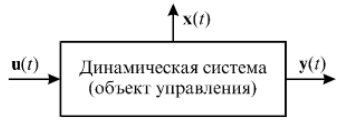
Figure 4 – Représentation du système dynamique dans la théorie de la commande adaptive Le dynamique de l'objet de la commande on peut être présentée sous la forme discontinue ([3], p. 46): 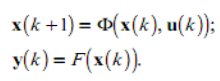
où х(k) – un vecteur d'état de l'objet durant le tact k; u(k) – un vecteur de la commande; y(k) – un vecteur de la sortie de l'objet de la commande; Ф et F – les vecteurs des fonctions des transformations statiques non linéaires.
Cette équation présente le dynamique du système, comme la transformation L'utilisation du réseau neurone permet de résoudre le problème de la commande par l'objet dynamique non linéaire par la méthode de la création du système de commande adaptive avec contrôleur neuronale appris (CN). L'apprentissage du réseau neurones est considéré comme le processus de la production dans le système de commande la réaction désirée sur les signaux extérieurs par de la méthode des influences multiples sur le système et la correction extérieure. Par la correction extérieure comprennent l'apprentissage supervisé, auquel est connue la réaction désirée du contrôleur neuronal sur les influences définies ([3], p. 49). 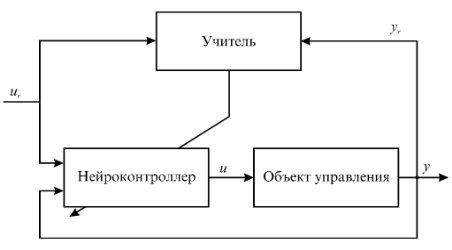
Figure 5 – Schéma du système de commande avec contrôleur neuronale appris En phase de l'adaptation un apprentissage est utilisé pour la réception de l'information sur l'état et les caractéristiques du système de commande qui est nécessaire pour la commande optimale dans les conditions de l'imprécision de l'environnement. Il existe multitude d'approches de l'application des réseaux neurones en qualité du contrôleur neuronale. A la commande des objets non linéaires dynamiques l'avantage ont les réseaux neurones récurrents (RNR). La présence des rétroactions et les éléments du retard temporaire donne â tels réseaux les propriétés non linéaires dynamiques personnelles que se fait sentir aussi leur capacité de l'apprentissage. Une de principales applications RNR sont les émulateurs neuronales des objets dynamiques, i.e. eux modèles des réseaux neurones qui apprennent â modeler le dynamique de l'objet de la commande. Mais l'utilisation des réseaux neurones récurrents pour les problèmes de la commande des objets non linéaires dynamiques provoque aussi les difficultés définies. Vers les défauts principals des réseaux neurones récurrents traditionnels, qui embarrasse leur application, il faut référer à la vitesse basse de l'apprentissage fondé sur la méthode de rétropropagation du gradient, et la complexité de la garantie de la stabilité, lié avec l'absence des méthodes analytiques de l'étude de la stabilité des systèmes non linéaires dynamiques.
Ces défauts on peut vaincre â l'aide de echo state network. Ils possedent par la particularité caractéristique qui consiste en utilisation d'un La notion de réservoir computing était proposée pour la première fois par Wolfgang Mass et Herbert Jeager en 2001, sous le nom de Liquid-state machine et Echo state network. Le schéma structural du réservoir computing est présenté sur la fig.6. 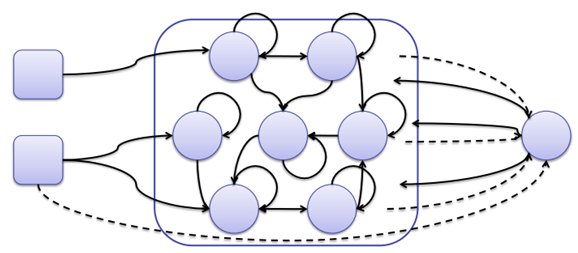
Figure 6 – Schéma structural du réservoir computing En vue générale, le réservoir computing est un réseau neurones récurrent, les coefficients du poid et les liaisons synaptiques à qui sont distribuées accidentellement (en général, avec 1 % par la connectivité); ils sont donnés une fois à l'initialisation du réseau et ne changent pas en processus de son fonctionnement. Le réservoir computing sert pour la propagation et la stabilisation des signaux des neurones de la couche d'entrée et la transmission de leurs signaux combinés sur la couche de sortie du réseau. L'avantage principal du réservoir computing devant des réseaux neurones avec le retard temporaire – un grand ensemble de la représentation dynamique l'entrée-sortie.
L'architecture echo state network est présentée sur la fig 7. Le réseau contient la couche d'entrée, la couche cachée embrassée par les rétroactions et appelée aussi par 
Animation: 6 cadres, durée de chaque cadre – 50 ms, 63.6 Kb
A l'amenée sur l'entrée d'un tel réseau d'un certain signal il est fixé dans la couche d'entrée. Puis on produit quelques itérations dans la couche cachée du réseau neurone pendant que ses signaux de sortie ne sont pas stabilisés. De plus dans la couche cachée on observe affaiblies selon l'amplitude des états précédents du réseau u(n), u(n-1), …, d'où provien le nom La fig. 8 oppose graphiquement la méthode classique des réseaux neurones récurrents et l'approche avec l'utilisation du réservoir computing ([7], p. 129). 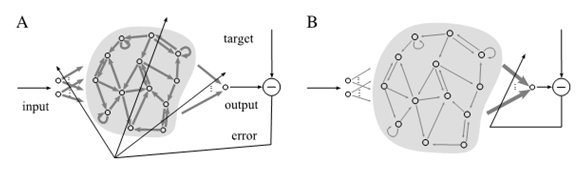
Figure 8 – А – Apprentissage classique du réseau neurone récurrent par la méthode de rétropropagation du gradient régle les poids synaptiques dans toutes les couches du réseau; B – Réglage des poids dans le réservoir computing se passe seulement dans la couche de sortie Une telle division permet d'éviter les défauts traditionnels du réseau neurone récurrent et assure la grande vitesse de l'apprentissage. A l'utilisation echo state network pour le problème de la commande par l'objet dynamique non linéaire, la couche cachée du réseau accomplit la fonction d'émulateur neuronale, qui apprend à modeler la dynamique de l'objet de la commande et la couche de sortie du réseau – la fonction du contrôleur neuronale, qui forme les signaux des commandes. L'apprentissage du contrôleur neuronale se passe en temps réel (en régime on-line). Dans le cas où u(n) et ytarget(n) – les signaux discontinus, le problème de l'apprentissage comprend dans l'étude de la fonction y(n)=y(…, u(n-1), u(n)), de la condition pour que la fonction de l'erreur E(y, ytarget) était réduite au minimum. A titre de la fonction de l'erreur utilisent d'habitude l'erreur normalisée quadratique moyenne (NRMSE): 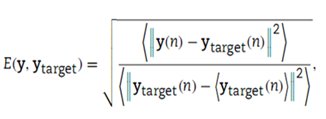
Pour l'apprentissage de la couche de sortie echo state network on peut appliquer la méthode populaire de rétropropagation du gradient. Les valeurs des états des signaux dans la couche cachée et couche de sortie du réseau neurone sont calculés en conséquence [4]: 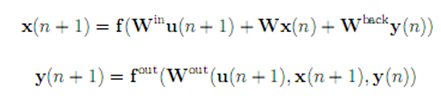
où f = (f1, … , fN) – la fonction d'activation des neurones de la couche cachée (en général, la fonction sigmoïde); Win, W, Wback, Wout – la matrice des poids de la couche d'entrée, la couche cachée, les poids des rétroactions des neurones de la couche cachée et les coefficients au poids de la couche de sortie; fout – la fonction d'activation des neurones de la couche de sortie. Ainsi, on peut faire la conclusion que echo state network peut être appliqué pour la résolution du problème de la commande de l'objet non linéaire dynamique en régime on-line en assurant une haute qualité de la commande à assez de grande vitesse de l'apprentissage. Conclusions et prochaines étapes du travailAu moment de la rédaction du compte rendu le travail magistère est en cours. L'achèvement définitif de l'oeuvre de magistére a lieu en décembre 2012. A l'étape actuelle de l'exécution du travail je m'occupe de l'installation des jauges des contraintes pour la possibilité de la réalisation de l'expérience de la réception du signal le plus précis à la commande du fauteuil roulant électrique par une tierce personne. A la base des valeurs des signaux reçus je vais former l'échantillonnage, qui sera utilisé pour l'apprentissage du réseau neurone. Les étapes prochaines de l'exécution du travail
Références
|