
Реферат за темою магістерської роботиЗміст
ВступВ теперішній час в світі спостерігається тенденція активного впровадження засобів автоматизації і різних інноваційних технологій в усі сфери людської діяльності. У великій мірі технічний прогрес зачепив й галузі охорони здоров'я та медицини, в які провідні країни світу в останні десятиріччя інвестують значні кошти. Одним з пріоритетних напрямків у цій галузі є розробка та удосконалення засобів догляду для людей з обмеженими фізичними можливостями, здатність до самостійного пересування яких обмежена. Зокрема, у багатьох лабораторіях світу ведуться роботи зі створення роботів у вигляді інвалідних крісел. Використання штучного інтелекту в них дозволяє полегшити керування ними [6]. 1. Об'єкт дослідженняІнвалідне крісло з електроприводом Invacare Storm XS, з двома повідними незалежними колесами, кожне з яких приводиться в рух двигуном постійного струму. 2. Постановка і мета роботиІнвалідне крісло з електроприводом є складною керованою електромеханічною системою, що складається з ходової частини і багаторівневої системи керування рухом. В ньому одночасно протікають механічні процеси – рух крісла, та інформаційні процеси – обробка сигналів вимірювальних пристроїв і формування керуючих сигналів. Модель інвалідного крісла розглядається як нелінійний динамічний об'єкт. 
Рисунок 1 – Інвалідне крісло з електроприводом Invacare Storm XS Керування інвалідним кріслом з електроприводом, в більшості випадків, здійснюється двома способами: або за допомогою джойстика, або особою, що супроводжує, яку також називають третя персона. У даній роботі розглядається другий спосіб, про який надалі буде йти мова. При керуванні третьою персоною інвалідне крісло буде рухатися відповідно до закону руху, який відтворюється особою, що супроводжує, на підставі сприйняття інформації про навколишній світ і суб'єктивної моторики. Людина генерує бажану траєкторію, грунтуючись на різній інформації про навколишнє середовище, а передати інформацію про бажану траєкторію вона може тактильно, через величину зусилля, що прикладається на ручки керування кріслом. Основною незручністю при керуванні третьою персоною є велика маса крісла-каталки. Так, наприклад, маса досліджуваного крісла Invacare Storm XS складає близько 70 кг, разом з акумуляторами – 103 кг. Також слід враховувати той факт, що в кріслі буде знаходитися людина, що в сукупності робить керування кріслом дуже складним і незручним. Мета роботи – на базі апарату штучних нейронних мереж (ШНМ) розробити спосіб керування інвалідним кріслом, що полегшує вплив з боку особи, що супроводжує і компенсує зусилля, що прикладаються нею до крісла. 3. Принцип і короткий опис роботиДля приведення до руху крісла-каталки особою, що супроводжує прикладається деяке зусилля, яке вимірюється за допомогою тензорезистивних датчиків, розташованих на ручках керування кріслом. Принцип дії таких датчиків заснований на зміні їхнього опору в залежності від деформації конструкції, на якій вони закріплені, з подальшим перетворенням в пропорційний електричний сигнал. Таким чином можна виміряти значення сили, що прикладається третьою персоною до крісла. Отриманий сигнал буде дуже маленьким за амплітудою, тому його необхідно підсилити за допомогою тензометричного підсилювача, схема якого представлена на рис.2 (у даній роботі використовується підсилювач, розроблений аспірантами В.Н. Хоменко і А.А. Мельником, з коефіцієнтом підсилення 500, що живиться від двох батарейок «Крона» напругою в 9 В). 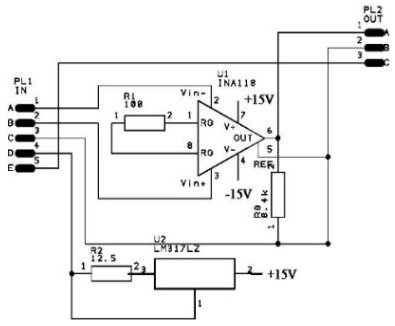
Рисунок 2 – Електрична схема тензометричного підсилювача на базі мікросхеми Ina118 Сигнал з тензодатчиків є аналоговим сигналом. Отриманий сигнал надходить на джойстик, де відбувається його перетворення у цифровий сигнал. Цифровий сигнал – це дискретний сигнал за рівнем і часом, причому число дискретних значень рівнів у нього скінченно. Так як в цьому випадку рівні дискретного сигналу можна пронумерувати числами з кінцевим числом розрядів, то такий дискретний сигнал називається цифровим. Підсилений і оцифрований сигнал надходить на мікроконтролер, у складі якого буде знаходитись нейронна мережа у вигляді програми. В такому випадку нейронна мережа повинна виконувати функції нейроконтролера, а саме на основі отриманих даних сформувати сигнал керування на виконавчі приводи, тим самим корегуючи впливи особи, що супроводжує. 4. Проблемы та методіки їх рішенняЗадачу проекту можна розглядати, як задачу адаптивного нейрокерування нелінійним динамічним об'єктом в режимі реального часу. Її особливість полягає у відсутності точних знань про математичну модель об'єкта керування, будь то диференціальні рівняння або щільності ймовірностей випадкових зовнішніх впливів. В задачах нейрокерування для представлення об'єкта керування використовують модель «чорного ящика», в якому спостережуваними є тільки поточні значення входу і виходу. При цьому стан самого об'єкта вважається недоступним для зовнішнього спостереження. Мета системи керування (СК) полягає в тому, щоб вже в процесі функціонування визначити закон регулювання, що забезпечує оптимальну поведінку об'єкта. Для вирішення цієї задачі на додаток до основного контуру в систему керування вводиться контур адаптації[3]. 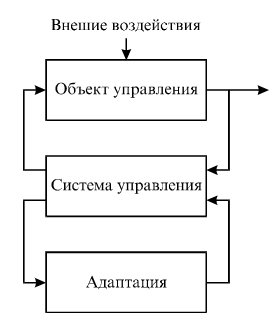
Рисунок 3 – Загальна схема адаптивної системи керування На рис.4 представлена деяка динамічна система (об'єкт керування). В адаптивній постановці задачі об'єкт керування описується своєю функціональною моделлю ([3], стор. 45): 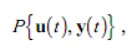
яка пов'язує вектор вхідних впливів u(t) з вектором вихідних сигналів y(t). Такий опис бере свій початок від ідеї «чорного ящика» і не є портретом динамічної поведінки об'єкта, а відображає лише його функціональні зв'язки. 
Рисунок 4 – Представлення динамічної системи в адаптивній теорії керування Динаміку поведінки об'єкта керування можна представити в дискретному виді ([3], стор. 46): 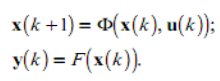
де х(k) – значення вектора стану об'єкта на k-му такті; u(k) – значення вектора керування; y(k) – значення виходу об'єкту керування; Ф і F – вектори функцій статичних нелінійних перетворень. Дане рівняння представляє динаміку системи, як перетворення «вхід-вихід». Використання штучних нейронних мереж дозволяє вирішувати задачу керування нелінійним динамічним об'єктом шляхом створення адаптивної системи керування з нейроконтролером, що навчається. Тут під навчанням мається на увазі процес вироблення в системі керування бажаної реакції на зовнішні сигнали шляхом багаторазових впливів на систему і зовнішнього коригування. Під зовнішнім коригуванням розуміють контрольоване навчання, при якому відома бажана реакція нейроконтролера на певні впливи ([3], стор. 49). 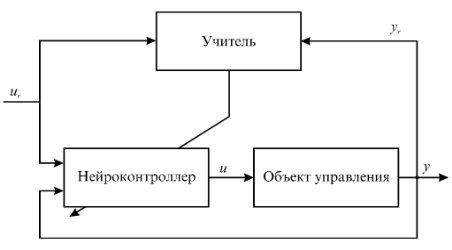
Рисунок 5 – Система керування з нейроконтролером, що навчається При адаптації навчання використовується для отримання інформації про стан і характеристики системи керування, необхідної для оптимального керування в умовах невизначеності зовнішнього середовища. Існує безліч підходів до застосування нейронних мереж в якості нейроконтролерів. При керуванні нелінійними динамічними об'єктами перевагу мають рекурентні нейронні мережі (РНМ). Наявність зворотних зв'язків і елементів часової затримки надає таким мережам власні нелінійні динамічні властивості, що також позначається на їх здатності до навчання. Одним з головних застосувань РНМ є нейроемулятори динамічних об'єктів, тобто їх нейромережеві моделі, які навчаються моделювати динаміку об'єкта керування. Але використання рекурентних нейронних мереж для задач керування нелінійними динамічними об'єктами викликає також певні труднощі. До основних недоліків традиційних рекурентних нейронних мереж, що утрудняє їх застосування, слід віднести низьку швидкість навчання, заснованого на процедурі зворотного поширення помилки, і складність забезпечення стійкості, пов'язану з відсутністю аналітичних методів дослідження стійкості нелінійних динамічних систем. Подолати ці недоліки можна за допомогою нейронних ехо мереж, характерною особливістю яких є використання «обчислювального резервуара» [1]. Поняття обчислювальний резервуар вперше було запропоновано Вольфгангом Массом і Гербертом Егером в 2001 році під назвою Liquid-state machine та Echo state network. Структурна схема обчислювального резервуара представлена на рисунку 6. 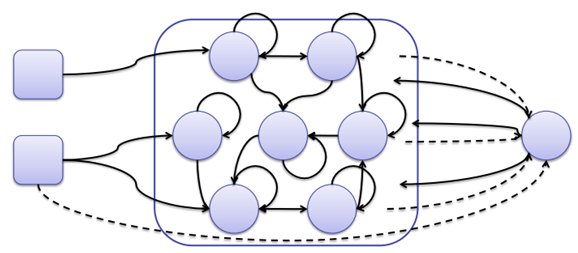
Рисунок 6 – Структурна схема обчислювального резервуара В загальному вигляді, обчислювальний резервуар – це рекурентна нейронна мережа, вагові коефіцієнти і синаптичні з'єднання в якій розподілені випадковим чином (як правило, з 1% зв'язністю); вони задаються один раз при ініціалізації мережі і не змінюються в процесі її функціонування. Обчислювальний резервуар служить для розповсюдження і стабілізації сигналів нейронів вхідного шару та передачі їх комбінованих сигналів на вихідний шар мережі. Головна перевага обчислювального резервуара перед нейронними мережами з часовою затримкою – велика сукупність динамічного відображення «вхід-вихід». Архітектура нейронної ехо мережі представлена на рис. 7. Мережа містить вхідний шар, прихований шар, охоплений зворотними зв'язками і який називають також «динамічним резервуаром», і вихідний шар, що зчитує інформацію з прихованого шару. Основна особливість нейронних ехо мереж полягає в тому, що налаштованими є тільки синаптичні ваги вихідного шару [7]. 
Анімація: 6 кадрів, дтривалість кожного кадру – 50 мс, 63.6 Кб При подачі на вхід такої мережі деякого сигналу він фіксується у вхідному шарі. Потім відбувається кілька ітерацій в прихованому шарі мережі, поки його вихідні сигнали не стабілізуються. При цьому в прихованому шарі спостерігаються ослаблені за амплітудою образи попередніх станів мережі u(n), u(n-1), ..., звідки і пішла назва «ехо мережа» (echo-state network). Налаштування синаптичних ваг і формування бажаного сигналу проводиться в вихідному шарі нейронної мережі. Рис.8 графічно протиставляє класичний метод рекурентних нейронних мереж і підхід з використанням обчислювального резервуара ([7], стор. 129). 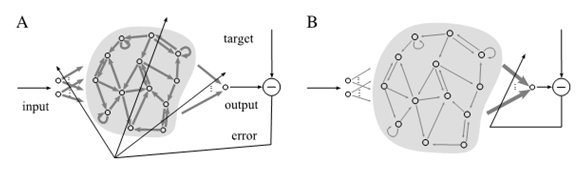
Рисунок 8 – А – Класичне навчання рекуррентной нейронної мережі методом градієнтного спуску налаштовує вагові коефіцієнти у всіх шарах мережі; В – Налаштування ваг в обчислювальному резервуарі відбувається тільки в вихідному шарі Таке розділення дозволяє уникнути недоліків традиційних рекурентних нейронних мереж і забезпечує високу швидкість навчання. При використанні нейронної ехо мережі для задачі керування нелінійним динамічним об'єктом, прихований шар мережі виконує функцію нейроемулятора, який навчається моделювати динаміку об'єкта керування, а вихідний шар мережі – функцію нейроконтролера, який формує керуючі сигнали. Навчання нейроконтролера відбувається в реальному часі (в режимі on-line). У випадку, коли u(n) і ytarget(n) – дискретні сигнали, задача навчання полягає у вивченні функції y(n) = y(..., u(n-1), u(n)), з умови, щоб функція помилки E(y, ytarget) зводилася до мінімуму. В якості функції помилки зазвичай використовують нормалізовану середньоквадратичну помилку: 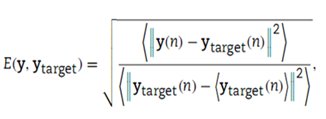
Для навчання вихідного шару нейронної ехо мережі може бути застосований популярний метод зворотного поширення помилки. Значення станів сигналів в прихованому і вихідному шарах мережі обчислюються відповідно [4]: 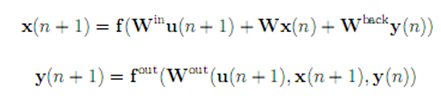
де f = (f1, ..., fN) – функція активації нейронів прихованого шару (як правило, сигмоїдальна функція); Win, W, Wback, Wout – матриця вагових з'єднань вхідного шару, прихованого шару, ваг зворотних зв'язків нейронів прихованого шару та вагові коефіцієнти вихідного шару; fout – функція активації нейронів вихідного шару. Таким чином, можна зробити висновок, що нейронна ехо мережа може бути застосована для вирішення завдань керування інвалідним кріслом з електроприводом в режимі реального часу, забезпечуючи високу якість керування при досить великій швидкості навчання. Висновки та подальші етапи роботиВ момент написання реферату магістерська робота знаходиться в стадії розробки. Остаточне завершення роботи відбудеться в грудні 2012 року. На даному етапі роботи я займаюся установкою тензорезистивних датчиків для проведення експерименту з отримання найбільш точного сигналу при керуванні інвалідним кріслом з електроприводом особою, що супроводжує. На основі значень отриманих сигналів я збираюся сформувати вибірку, яка буде використана для навчання нейронної мережі. Подальші етапи і послідовність виконання роботи
Перелік посилань
|