
Реферат
Зміст
- Вступ
- 1. Актуальність теми
- 2. Мета і задачі дослідження та заплановані результати
- 3. Опис конструкціі
- 4. Огляд досліджень та розробок
- Висновки
- Перелік посилань
Вступ
Конверторний спосіб виробництва є одним з основних
способів отримання
сталі і невід'ємною частиною сучасної металургійної промисловості.
Завданням
якісного виробництва сталі є зменшення кількості шлаку, яке потрапляє в
сталерозливних ківш. Існують різні способи відсічення конвертерного
шлаку:
газодинамическая відсічення, з використанням шиберних затворів різних
типів, з
використанням відсічних елементів.
1. Актуальність теми
Розглянемо
спосіб із
застосуванням відсічних елементів поплавкового типу. Для їх введення в
ванну
кисневого конвертера застосовують спеціальні маніпулятори. Найбільшого
поширення набули конструкції фірм «Monocon International
Refractories Ltd.»
(http://www.monocon.info) і «Yuntian Metallurgy Technology Co.,
Ltd.» (http://ytslagstopper.com).
Таке безліч
конструктивних виконань характеризується виробничими і технологічними
особливостями робочих майданчиків кисневих конвертерів.
2. Мета і задачі дослідження та заплановані результати
На
основі аналізу аналізу
конструктивних особливостей існуючих маніпуляторів:
1)
розробити конструкцію
з мінімальною кількістю приводів;
2)
розробити універсальну
конструкцію маніпулятора, для різних виробничих умов;
3)
проаналізувати роботу
маніпулятора з різними варіантами комбінацій приводів;
4)
оцінити ефективність
застосування комбінацій приводів;
3. Опис конструкції
Конструкція
маніпулятора
осьового типу для введення відсічних елементів в сталевипускного канал
конвертера при випуску стали показана на малюнку 1. Цей маніпулятор
включає
вертикальну колону 1, встановлену з можливістю повороту в нижній 2 і
верхньої 3
нерухомих підшипникових опорах і оснащену консоллю 4, на якій
змонтований
підшипниковий вузол 5 з вертикальним валом 6. На нижньому кінці цього
вала
жорстко закріплено кронштейн 7, що має дві поздовжні напрямні, в яких
розміщені
ролики каретки 8, що має можливість переміщення від носительно
напрямних і
несучої порожнисту штангу 9. На передньому кінці штанги за допомогою
подпружиненного фіксатора закріплений отсечной елемент 10. Механізм
повороту
кронштейна щодо консолі включає конічну зубчасту пару 11 передавальним
числом,
рівним 1, що зв'язує вертикальний вал із заднім кінцем горизонтального
вала 12,
на передньому кінці якого жорстко закріплено конічне зубчасте колесо
13, що має
можливість обкатування по конічної зубчастої шестірні 14.
Ця шестерня жорстко пов'язана з нерухомою верхньою опорою вертикальної колони. Причому ставлення чисел зубів нерухомою конічної шестірні і конічного зубчастого колеса становить 2: 1. Зазначені співвідношення конструктивних елементів конічних передач дозволяють автоматично забезпечити одночасно при повороті колони з консоллю на кут 90 град, з вихідного положення відносний поворот кронштейна на 180 град., В результаті чого консоль і кронштейн будуть зорієнтовані в лінію і займуть співвісний положення з кисневим конвертером, кік показано на малюнку 1б. Подальшу доставку відсічного елемента в зону розташування сталевипускного каналу конвертера (рис. 1в) здійснюють переміщенням каретки з порожнистої штангою відносно кронштейна за допомогою ланцюгового приводу.
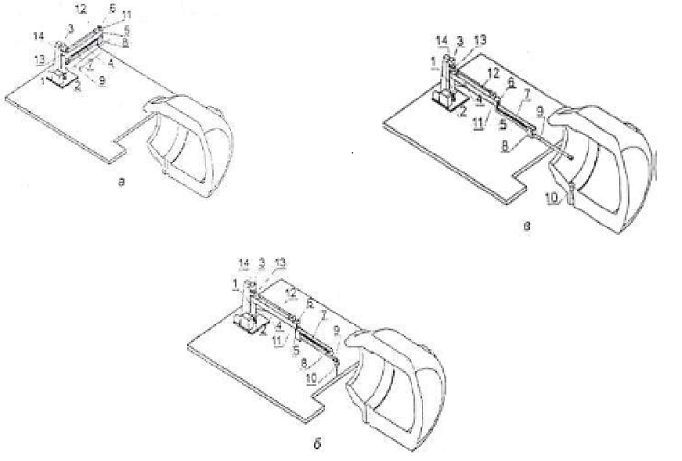
Малюнок 1 - Пристрій маніпулятора осьового типу і розташування його елементів у вихідному (а), проміжному (б), і кінцевому (в) положеннях
Малюнок
1.1 - Анімація
руху маніпулятора осьового типу: кадрів
- 24; повторень - 5; розмір
анимаціі
- 234 кб
4. Огляд досліджень та розробок
Маніпулятор
підвісного
типу з кареткою (рис.2) монтується на металеву конструкцію перекриття
цеху або
на спеціальну раму і не займає пів робочого майданчика. При роботі за
рахунок
використання системи важеля маніпулятор опускається в робоче положення,
після
чого каретка вводить штангу з відсічним елементом в порожнину
конвертера. Дана
конструкція має в своєму складі два приводи - один для
підняття-опускання
маніпулятора, другий для переміщення каретки зі штангою для її введення
в
кисневий конвертер.
Маніпулятор пантографного типу (рис.3) монтується так само на металеву конструкцію перекриття цеху. В паркувальному положенні знаходиться над робочою площадкою, в робоче положення наводиться в один рух з використанням одного приводу.
Маніпулятор
бічного типу
в стані парковки розташований на робочому майданчику стаціонарно, збоку
від
кисневого конвертера (рис.4). У робочому положенні маніпулятор заводить
штангу
з відсічним елементом за допомогою одного приводу. Після операції
пристрій
повертається у вихідне положення.
Маніпулятор телескопічного типу розташовується навпроти кисневого конвертера і встановлений на робочому майданчику стаціонарно (рис.5), в своєму складі має два приводи. При виконанні робочої операції телескопічна штанга заводить отсечной елемент в конвертер. Після виконання операції по скиданню отсечного елемента маніпулятор повертається в паркувальне положення.
Представлена на (рис.6) конструкція є різновидом телескопічного маніпулятора, на рухомому візку. Маніпулятор знаходиться на паркувальному місці збоку від конвертера і по команді викочується в робоче положення навпроти горловини, телескопічна штанга вводить отсечной елемент в порожнину кисневого конвертера.
Телескопічний маніпулятор підвісного типу (рис.7) кріпиться до металевих конструкцій верхніх перекриттів цеху. Пристрій має в своєму складі два приводи - один для підняття-опускання маніпулятора, другий приводить в рух телескопічну штангу для її введення в кисневий конвертер.
Різновид телескопічного маніпулятора підвісної типу на рухомому візку (рис.8) вимагає спеціальну раму для переміщення візка маніпулятора уздовж кисневого конвертера. Маніпулятор наводиться в робоче положення двома приводами - один для переміщення візка, другий для розкладання телескопічної штанги.
Маніпулятор наступної конструкції (рис.9) виготовляють фірми «Monocon International Refractories Ltd.» і «Yuntian Metallurgy Technology Co., Ltd.», він являє собою невелику кабіну з пультом управління всередині і закріпленої на ній штангою з відсічним елементом. Маніпулятор розташовується навпроти конвертера на рейковому шляху, що дає йому можливість під'їжджати і від'їжджати до конвертору для виконання операції по скиданню отсечного елемента.
Співробітниками
кафедри
«Механічне обладнання заводів чорної металургії ім. професора
Седуш В.Я.
»(МОЗЧМ) була розроблена універсальна конструкція маніпулятора
для введення
відсічних елементів в ванну кисневого конвертера (рис.10), яка може
розташовуватися як навпроти, так і збоку від конвертера, крім того може
встановлюватися як стаціонарно, так і на рухомому візку [2].
Висновки
Таким
чином, аналізуючи
конструктивні особливості маніпуляторів зарубіжних фірм, можна виділити
ряд
характерних ознак:
1)
Кожен з них в своєму
складі має як мінімум два приводи, один - для виходу з паркувального
позиції,
інші - для здійснення робочої операції по введенню штанги з відсічним
елементом
в порожнину кисневого конвертера;
2)
Конструкція кожного
маніпулятора є індивідуальною, пристосованої під певні виробничі умови;
3)
Деякі конструкції навіть
в паркувальному стані мають великі габарити;
4)
Ряд конструкцій можуть
бути використані тільки для новозбудованих конвертерних цехів.
Конструкція маніпулятора кафедри «Механічне обладнання заводів чорної металургії ім. професора Седуш В.Я. »має меншу енергоємність, меншими габаритами, і може бути використана і адаптована під різну локацію щодо кисневого конвертера.
Перелік посилань
- Опыт разработки систем отсечки шлака для сталеплавильных агрегатов / С.П. Еронько, А.Ю. Цупрун, С.А. Бедарев, С.В. Мечик // «Черметинформация». Бюллетень «Черная металлургия», 2007. – вып. 9, – С. 81 – 87.
- Еронько С. П., Смирнов А.Н., Кукуй Д.П. Разработка эффективных схем отсечки шлака при сливе металла из конвертера // Металлургическая и горнорудная промышленность. - 2003. - №8. - С. 33 – 37.
- Опыт разработки систем отсечки шлака для сталеплавильных агрегатов / С.П. Еронько, А.Ю. Цупрун, С.А. Бедарев и др. // ОАО «Черметинформация». Бюлл. «Черная металлургия» - 2007 - № 9 - С. 81 – 87.
- Исследование напряженно-деформированного состояния звеньев манипулятора для ввода отсечных элементов в выпускной канал конвертера / Еронько С.П., Ошовская Е.В., Бедарев С.А., Мечик С.В. // Металлургическая и горнорудная промышленность. – 2007.– №5. – С. 107 – 111.
- Теплофизические свойства веществ. Справочник / Под ред. Н.Б. Варгафтика. – Л.: Гос.энергетическое изд-во, 1956. – C. 367.
- Использование математического моделирования и САПР при разработке устройства устройства для отсечки конвертерного шлака / С.П. Еронько, Е.В. Ошовская, В.В. Киселев и др. // Прогрессивные технологии и системы машиностроения: Сборник научных трудов - Донецк: ДонГТУ, 2002 - № 23 - С. 52 – 56.
- Исследование напряженно-деформированного состояния звеньев манипулятора для ввода отсечных элементов в выпускной канал конвертера / Еронько С.П., Ошовская Е.В., Бедарев С.А., Мечик С.В. // Металлургическая и горнорудная промышленность. – 2007.– №5. – С. 107 – 111.