
Introduction
1. Theme urgency
2. Aims and objectives of the study
3. Overview of UAV types
4. Review of the tasks performed by the UAV
5. Review of available on the market technical solutions for autonomous control of UAVs
6. Overview of the components for the development of the UAV control software
Conclusions
References
Introduction
At the moment, unmanned aerial vehicles (UAVs) are used to solve various tasks, that were previously solved using manned aircraft. Some of the first UAVs were quite expensive to operate, but with an intensive leap in technology development, the cost of operating UAVs in the vast majority of cases became less, and their cost in comparison with manned aircrafts and the absence of a pilot on board allowed them to carry a large payload and go on tasks that have the risk of losing an aircraft. Initially, the UAV was piloted by the operator from the ground remotely, but this scheme has its drawbacks, for example, inability to control due to large deletions, terrain features, inaccessibility of radio frequencies, interference, etc.
1. Theme urgency
Until a few years ago, unmanned aerial systems were used only in the military sphere because of the high cost and large size of computing equipment, today they are used everywhere. Progress took a step forward, the size and cost of computers decreased, their productivity increased, there was a whole class - microcomputers. Now you can create not just radio-controlled inexpensive unmanned aerial vehicles (UAVs), but also UAVs with a full-fledged computer on board that will control it either by executing commands by the operator, or by performing a pre-loaded flight mission. Also, unmanned aerial systems have undeniable advantages over manned systems - lack of a pilot, cheapness and small size, which is why they inevitably stepped into the civil sector.
The use of UAV is quite a topical direction for the development of monitoring of industrial facilities, aerial photography, monitoring of emergencies. All data is obtained autonomously even from hard-to-reach places without endangering human life, while the cost of using UAVs is much lower than when using manned vehicles.
In this regard, the use of unmanned aerial vehicles is the most effective means for monitoring industrial facilities. Despite the huge number of tasks solved by unmanned aerial vehicles, their use in the CIS countries is much less than abroad, so the search for use opportunities and their implementation in our country is the most urgent.
2. Aims and objectives of the study
The purpose of this thesis is to find ways to use UAVs for use in the civil sector.
To achieve the results, the following tasks were set:
selection of the hardware of the management complex and the software development environment
the creation of a schematic diagram, its assembly and testing
software implementation of control algorithms of UAV
testing of the complex as a whole
elimination of shortcomings
The main problems are:
choice of components and housing for the UAV;
selection of radio modules and frequency range for UAV control;
protocols for the exchange of information between the UAV and the operator;
permission to use airspace.
In the civil sector in the near future the most demanded tasks of UAV will be monitoring and reconnaissance. Monitoring of industrial facilities is now one of the most urgent tasks, and in the case of unmanned aerial systems this will save a lot of money and time, since it takes much less time to start a UAV than to start a manned aircraft and the time spent in the air can be much higher for account of small size and small weight. From a financial point of view, the cost of servicing manned aircraft is much greater than the maintenance of unmanned aerial vehicles.
From this it can be concluded that UAVs will be in demand when monitoring industrial facilities and long-range facilities, for example, various warehouses, agricultural lands, highways and pipelines.
3. Overview of UAV types
Unmanned aerial vehicles are one of the most important innovations of recent years. At the moment there are many types and varieties of UAVs. This is all due to the difference in needs and tasks for which they were developed. Some, for example, are necessary for aerial photography of events, filming, others for long-distance flights, inspections and monitoring of long-range objects. This difference determines the size, weight and design. There are several basic types of civilian UAVs.
UAVs of aircraft type - have a rigid fixed wing, which creates a lifting force. Due to this, they are easy to operate, they are resistant to harsh weather conditions, they can carry more payloads, and also overcome long distances with less energy consumption. Areas of their application - delivery of small loads, monitoring of long-range objects, long missions. However, it is not suitable for missions in which high positioning accuracy is required, as it must always be in motion to create a lifting force. The appearance of this type of UAV is shown in Figure 3.1. [1]

Figure 3.1 - Airborne UAV
UAVs of helicopter type - the lifting force is created by a bolt or several screws. Advantages of this type are vertical takeoff and landing, hovering in the air, accurate maneuvering, but they have less energy and less range. These UAVs are suitable for missions in which high positioning accuracy is required, such as checking the condition of the railway, pipelines, buildings, etc. The appearance of this type of UAV is shown in Figure 3.2. [2]
Multi-rotor UAV is the same as UAV helicopter type, but has more rotors.
Multi-rotor UAVs are divided into:
3 supporting screws (tricopters);
4 rotor screws (quadcopters);
6 rotors (hexacopters);
8 rotor screws (octocopters).
At the same time they have practically the same qualities as rotorcraft, but they are much more stable, more maneuverable and easier to control. The mission of multi-rotor UAVs is missions requiring special accuracy. The appearance of this type of UAV is shown in Figure 3.3. [3]


4. Review of the tasks performed by the UAV
After the creation of aircraft and helicopters, they proved to be an excellent tool for creating terrain maps, reconnaissance of new terrain, and search for any structures. Over time, the range of their application expanded, but with this the danger to the pilot increased. Also, in order to carry the weight of the pilot, the aircraft must have the dimensions sufficient to accommodate the pilot, and with this the mass, dimensions of the propulsion system (engine) and fuel consumption increase. [4]
The piloted aircraft were replaced by unmanned aerial vehicles that withstand high temperatures, large overloads, while consuming less fuel, having smaller dimensions and greater maneuverability. Due to this, some types can even work in confined spaces, for example, in caves or buildings. [4 , 5]
The main tasks are mapping (figure 4.1) [6], reconnaissance of terrain (figure 4.2) [7], object monitoring (Figure 4.3) [8], object protection (Figure 4.4) [9]. The use of UAVs for these tasks significantly reduces the cost of work by saving fuel, servicing a "large" aircraft and paying the pilot. [5]


(animation: 5 frames, 5 repetitions, 86.2 kilobytes)

UAVs also help people save lives by searching people (Figure 4.5) [10], detecting fires (Figure 4.6) [11], assisting in carrying out rescue operations (Figure 4.7) [12].



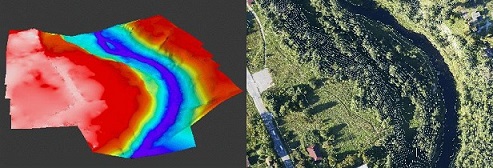
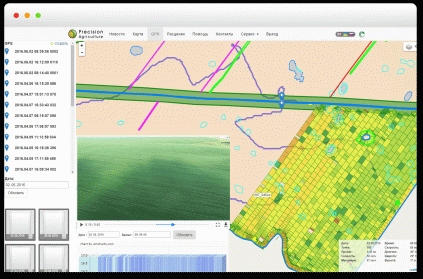
Agriculture also uses UAVs to survey fields (Figure 4.8) [13], which allows to avoid mistakes in the calculation of the purchase of grains of about 10-20%, which are unavoidable when using maps, as well as for assessing the condition of crops (Figure 4.9) [14] and monitoring of agricultural activities (Figure 4.10) [15]. [16]
The application of UAV to agriculture helps to solve the following problems: [15]
creation and updating in electronic form of maps and plans of cultivated lands
accounting of agricultural land
planning of sowing works on production sites
control of the volume and quality of fieldwork
maintenance of operational monitoring of the state of sowing crops
assessment of germination of crops
crop yield forecast
quality control of harvesting
protection of crops from theft
economic valuation
conducting ecological monitoring of agricultural land
calculation of the volume of fertilizers applied, etc.


5. Review of available on the market technical solutions for autonomous control of UAVs
At the moment, the market presents quite a lot of solutions for autonomous control of the UAV. Some have an open platform with the ability to refine for specific purposes and tasks, while others have a closed platform and allow you to do only what the manufacturer put into it, not allowing you to modify the system. Next, we will consider both types of systems
Open systems are represented by the following:
ArduPilot Mega 2.6;
Openpilot CC3D;
MultiWii SE v2.5.
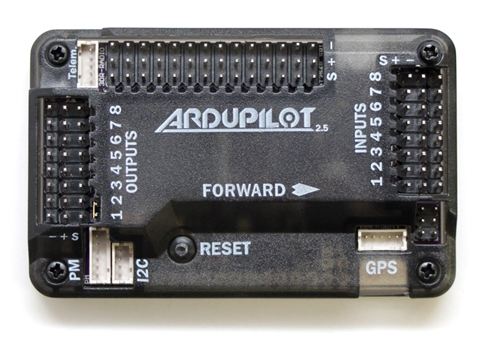
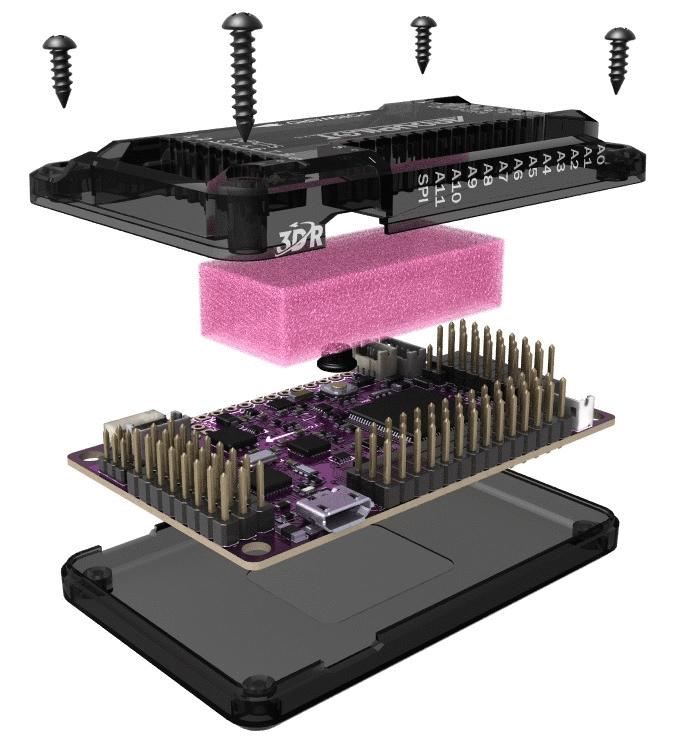
ArduPilot Mega 2.6 is one of the most powerful and popular control systems of UAVs. It contains not only the control microcontroller, but also a set of various sensors, namely the barometer and the accelerometer-gyroscope, based on the data received from these sensors, flight control is performed. The appearance of the controller is shown in Figures 5.1 and 5.2. [17]
This controller can control not only UAVs, but also ground, water and underwater unmanned vehicles, which is available in a very small number of controllers
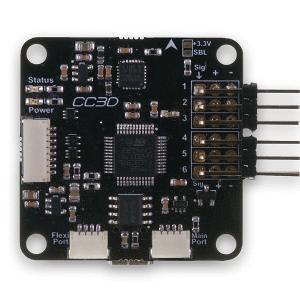
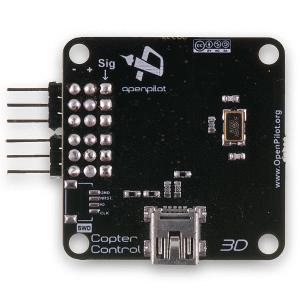
Openpilot CC3D - built on the basis of a more powerful than ArduPilot Mega 2.6, microcontroller STM32. Also allows you to manage a large number of unmanned vehicles, but only flying. Due to a more powerful microcontroller, it can execute commands more quickly, which is important for completely autonomous control of the UAV. Appearance is presented in Figures 5.3 and 5.4. Dimensions and weights are smaller than ArduPilot Mega 2.6, but also a set of sensors, too. There is no barometer used to determine altitude. [18]
Due to its weight and size characteristics it is ideally suited for use in micro-UAVs, for example, for flight in buildings or inspection of tunnels
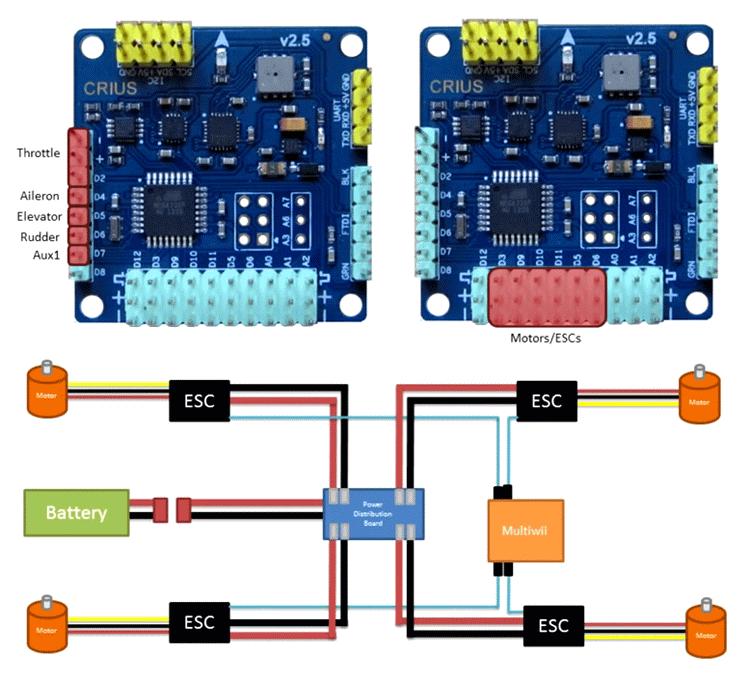
MultiWii SE v2.5 is based on Arduino, like ArduPilot Mega 2.6, but inferior to it in features, although it has the same set of sensors. Originally only suited for UAV amateur level, but due to open source software with the help of the community has developed to a decent level and can compete with others. Also, like the Openpilot CC3D, it is small in size and weight and can be used in micro-UAVs. Appearance is presented in figure 5.5
The characteristics and capabilities of these controllers are presented in the form of comparative tables - Table 5.1 and Table 5.2, respectively. [19]
Table 5.1 - Characteristics of open flight controllers
|
No. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Table 5.2 - Features of open flight controllers
|
No. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Windows / Mac / |
Windows / Mac / |
Windows / Mac / |
There is also a division of the types of unmanned vehicles that the complex can control. These types are presented in Table 5.3. [19]
Table 5.3 - Types of unmanned vehicles that the complex can control
|
No. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Thus, according to the tables, it can be concluded that the ArduPilot Mega 2.6 management complex has a greater set of capabilities than the Openpilot CC3D and MultiWii SE v2.5, but it has large dimensions and weight
6. Overview of the components for the development of the UAV control software
The main component of the UAV control system is the main computer center. Previously, we used microcontrollers that had little functionality, but with the development of technology, computers with the size of a little more microcontrollers - microcomputers appeared.
The first mass one was Raspberry Pi Model A, after which improved versions appeared whose characteristics are presented in Table 6.1, and the appearance is shown in Figure 6.1. [20 , 21]
Table 6.1 - Characteristics of Raspberry Pi
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|

This microcomputer revolutionized the world of electronics, allowing the use of relatively large computing power in small devices, which made it possible to create stand-alone systems without using a PC
In the wake of the popularity of Raspberry Pi, many of its "clones" began to appear, with more performance, but insufficient support from the manufacturer. Over time, normally-working microcomputers began to be manufactured, which, in terms of price / performance, significantly exceed the original.
One of the most successful analogs of Raspberry Pi for embedded systems, i.e. systems in which there is no need to display images on the monitor, is Orange Pi Zero. The characteristics of which are presented in Table 6.2, and the appearance in Figure 6.2. [22]
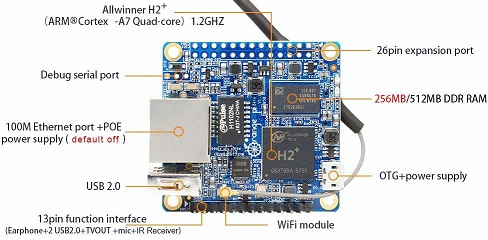
Table 6.2 - Characteristics of Orange Pi Zero
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
This microcomputer has 3 USB ports, which allows you to connect to it various peripheral devices, for example, cameras, various modules, memory devices, etc. I also have 26 general purpose I / O ports, among which there are I2C, SPI, UART, thanks to which it is possible to connect various sensors, radio modules, cameras, etc. [22]
Of the sensors necessary are position sensors in space, namely accelerometer-gyroscope, compass, barometer and GPS-module, and as a radio module can be used as a WiFi radio module, or any other, since there is the possibility of interaction with virtually any transmission protocol.
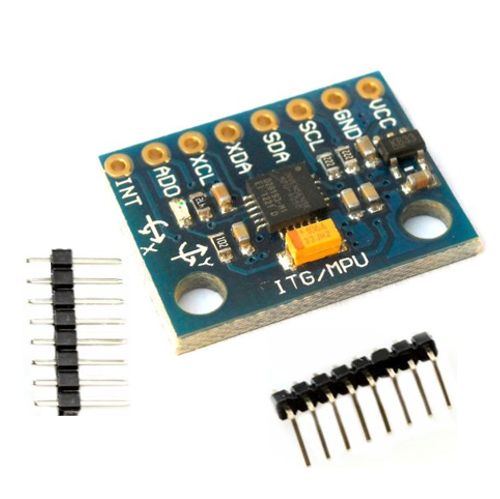
Accelerometer-gyroscope is designed to determine the angles of deflection of an aircraft relative to the Earth's plane. This is necessary for the possibility of automatic control or control with poor visibility. As an accelerometer-gyro sensor, you can use the MPU6050 accelerometer-gyroscope module, whose appearance is shown in Figure 6.3, and the characteristics in Table 6.3. [23]
Table 6.3 - Characteristics of the accelerometer-gyroscope module MPU-6050
|
No. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
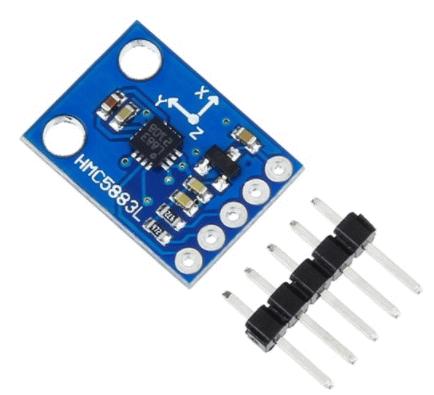
An electronic compass is used to determine the angle of the direction of motion of the aircraft and the possibility of changing the direction of motion. There are few options for the electronic compass modules on the market, but one of the known is the HMC5883L, whose characteristics are presented in Table 6.4, and the appearance is shown in Figure 6.4. [24]
Table 6.4 - Characteristics of the compass module HMC5883L
|
No. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
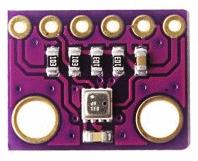
The electronic barometer is designed to measure atmospheric pressure, but since pressure varies at different heights, it is still possible to measure the barometric altitude necessary for autonomous control of the UAV, tracking its height and avoiding unplanned contact with the Earth's surface. For the control complex, it is proposed to use the Bosch BMP-280 barometer module. The characteristics are indicated in Table 6.5, the appearance is shown in Figure 6.5. [25]
Table 6.5 - Characteristics of the BMP-280 Barometer Module
|
No. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
The most important module, without which it becomes impossible to autonomously control the UAV is the GPS module. It serves to determine the coordinates of the current position of the aircraft, its speed and direction of motion. There are many different modules on the market, most of them support work not only with GPS, but also with GLONASS and Beidou. This increases the accuracy, but the cost of these modules is quite high. As a GPS-module it is possible to use Ublox NEO-6M. The characteristics are shown in Table 6.6, and the appearance in Figure 6.6. [26]
Table 6.6 - Characteristics of the GPS module of the barometer Ublox NEO-6M
|
No. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Conclusions
Thus, the UAV under development will be able to conduct almost continuous monitoring of the state of objects with small size and cost, without requiring constant monitoring by the staff. Due to the modular system, it is possible to re-equip it for other tasks.
At the current stage of the study, the following results were obtained:
The existing control systems of UAV are analyzed, advantages and disadvantages are studied;
selected components and developed a structural diagram of the hardware component of the UAV control system, which was assembled and launched;
describes the basic algorithms for reading information from sensors and control UAV;
The materials of the hull and type of UAV are chosen to provide low weight and the necessary flight characteristics.
At the next stage it is planned to build a UAV by installing a control complex on it, and to conduct flight tests with subsequent modification of both the software and hardware parts.
When writing this essay, the master's thesis is not yet complete. Final completion: May 2018. The full text of the work and materials on the topic can be obtained from the author or his supervisor after the specified date.
References
АВАКС [Электронный ресурс]: GAMMA – электронные данные, – режим доступа http://uav-siberia.com/catalog/product/gamma/ – дата доступа: сентябрь 2017.
"КБ ИНДЕЛА" [Электронный ресурс]: Беспилотный летательный аппарат INDELA-I.N.SKY – электронные данные, – режим доступа http://www.indelauav.com/product_insky.html – дата доступа: сентябрь 2017.
DJI Drone.UA-официальный дилер DJI в Украине [Электронный ресурс]: Inspire 2 – электронные данные, – режим доступа http://drone.ua/dji/shop/dronyi-dji/inspire/kvadrokopteryi-inspire/inspire-2/ – дата доступа: сентябрь 2017.
ZALA AERO GROUP [Электронный ресурс]: Применение беспилотников (беспилотных летательных аппаратов, БПЛА) – электронные данные, – режим доступа http://zala.aero/primenenie/ – дата доступа: сентябрь 2017.
Моисеев В.С. Основы теории эффективного применения беспилотных летательных аппаратов: монография. – Казань: Редакционно-издательский центр «Школа», 2015. 444 с. (Серия «Современная прикладная математика и информатика»).
Современные геоинформационные решения [Электронный ресурс]: Аэрофотосъемка с использованием беспилотного летательного аппарата – электронные данные, – режим доступа http://www.ark-on.ru/about/item119/ – дата доступа: сентябрь 2017.
Российская авиация [Электронный ресурс]: Тактический БПЛА «ГрАНТ» – электронные данные, – режим доступа http://авиару.рф/aviamuseum/aviatsiya/rf/bpla/takticheskij-bpla-grant/ – дата доступа: октябрь 2017.
РУСГЕОКОМ [Электронный ресурс]: Мониторинг трубопроводов и объектов нефтегазовой промышленности – электронные данные, – режим доступа http://www.rusgeo.com/distanczionnyij-kontrol-za-sostoyaniem-obektov-nefte-i-gazodobyivayushhej-promyishlennosti – дата доступа: сентябрь 2017.
ОАО «АГАТ-системы управления» [Электронный ресурс]: Услуги с использованием беспилотных летательных аппаратов (БЛА) – электронные данные, – режим доступа http://www.agat.by/products/robotic-platforms/unmanned-aircraft-complex/uav-service/ – дата доступа: сентябрь 2017.
AEROSCANAVIA [Электронный ресурс]: Аэрофотосъемка с БПЛА в разных сферах бизнеса – электронные данные, – режим доступа http://aeroscanavia.ru/ – дата доступа: октябрь 2017.
СъемкаСВоздуха.РФ [Электронный ресурс]: АЭРОФОТОСЪЕМКА В ЛЕСНОМ ХОЗЯЙСТВЕ – электронные данные, – режим доступа http://СъемкаСВоздуха.РФ/otrasli/bpla-v-leskhoze-i-rybnadzore.html – дата доступа: октябрь 2017.
РИЦ [Электронный ресурс]: ЧРЕЗВЫЧАЙНЫЕ СИТУАЦИИ – электронные данные, – режим доступа http://dronesystems.ru/application/alert – дата доступа: октябрь 2017.
PreAgri [Электронный ресурс]: Возможности PreAgri – электронные данные, – режим доступа https://preagri.com/features.htm – дата доступа: октябрь 2017.
MIT Technology Review [Электронный ресурс]: Six Ways Drones Are Revolutionizing Agriculture – электронные данные, – режим доступа https://www.technologyreview.com/s/601935/six-ways-drones-are-revolutionizing-agriculture/ – дата доступа: октябрь 2017.
РУСГЕОКОМ [Электронный ресурс]: Использование беспилотников для нужд сельского хозяйства – электронные данные, – режим доступа http://www.rusgeo.com/ispolzovanie-bpla-dlya-nuzhd-selskogo-xozyajstva – дата доступа: октябрь 2017.
РИЦ [Электронный ресурс]: СЕЛЬСКОЕ ХОЗЯЙСТВО – электронные данные, – режим доступа http://dronesystems.ru/application/sh – дата доступа: ноябрь 2017.
ArduPilot.org [Электронный ресурс]: Archived:APM 2.5 and 2.6 Overview – электронные данные, – режим доступа http://ardupilot.org/copter/docs/common-apm25-and-26-overview.html – дата доступа: ноябрь 2017.
LibrePilot/OpenPilot Wiki [Электронный ресурс]: CopterControl / CC3D / Atom Hardware Setup – электронные данные, – режим доступа http://opwiki.readthedocs.io/en/latest/user_manual/cc3d/cc3d.html – дата доступа: ноябрь 2017.
MosHobby [Электронный ресурс]: Полётные контроллеры – электронные данные, – режим доступа http://moshobby.ru/magazin-2/folder/poletnyye-kontrollery – дата доступа: ноябрь 2017.
Raspberry Pi – Википедия, свободная энциклопедия [Электронный ресурс]: – режим доступа https://ru.wikipedia.org/wiki/Raspberry_Pi – дата доступа: декабрь 2017.
Adafruit Industries, Unique & fun DIY electronics and kits [Электронный ресурс]: Raspberry Pi Model A – электронные данные, – режим доступа https://www.adafruit.com/product/1344 – дата доступа: декабрь 2017.
Orangepi [Электронный ресурс]: OrangePi Zero – электронные данные, – режим доступа http://www.orangepi.org/orangepizero/ – дата доступа: декабрь 2017.
emartee.com [Электронный ресурс]: MPU-6050 3 Axis Gyroscope And Accelerometer Module – электронные данные, – режим доступа http://www.emartee.com/product/42257/MPU%206050%203%20Axis%20Gyroscope%20And%20Accelerometer%20Module – дата доступа: декабрь 2017.
addicore.com [Электронный ресурс]: HMC5883L Triple-Axis Magnetometer Compass Module GY-273 – электронные данные, – режим доступа https://www.addicore.com/HMC5883L-Module-p/ad306.htm – дата доступа: декабрь 2017.
ARDU.NET [Электронный ресурс]: Модуль датчик давления arduino module bmp280 Pressure Sensor – электронные данные, – режим доступа http://ardu.net/ru/datchiki-i-sensory/363-modul-bmp280-i2c-datchik-davleniya-i-temperatury-module-pressure-novinka-spi-120768573.html – дата доступа: декабрь 2017.
addicore.com [Электронный ресурс]: u-blox NEO-6M GY-GPS6MV2 GPS module with on board EEPROM – электронные данные, – режим доступа https://www.addicore.com/NEO-6M-GPS-p/231.htm – дата доступа: декабрь 2017.