
Вступ
1. Актуальність теми
2. Цілі і завдання дослідження
3. Огляд типів БПЛА
4. Огляд завдань, які виконуються БПЛА
5. Огляд наявних на ринку технічних рішень для автономного управління БПЛА
6. Огляд компонентів для розробки програмного комплексу управління БПЛА
Висновки
Список джерел
Вступ
На даний момент безпілотні літальні апарати (БПЛА) застосовуються для вирішення різних завдань, які раніше вирішувалися із застосуванням пілотованих літальних апаратів. Одні з перших БПЛА були досить дорогі в експлуатації, але з інтенсивним стрибком у розвитку технологій вартість експлуатації БПЛА в переважній кількості випадків стала менше, а їх мала в порівнянні з пілотованими літальними апаратами собівартість і відсутність пілота на борту дозволяють їм нести велику корисне навантаження і вирушати на завдання, які мають ризик втрати літального апарату. Спочатку БПЛА пілотував оператором з землі віддалено, але дана схема має свої недоліки, наприклад, неможливість управління в зв'язку з великим видаленням, особливостями місцевості, недоступністю радіочастот, перешкодами і тощо
1. Актуальність теми
Ще кілька років тому безпілотні авіаційні системи використовувалися тільки у військовій сфері через дорожнечу і великих розмірів обчислювального обладнання, сьогодні використовуються повсюдно. Прогрес зробив крок далеко вперед, розміри і вартість комп'ютерів зменшилися, їх продуктивність збільшилася, з'явився цілий клас - мікрокомп'ютери. Тепер можна створювати не просто радіокеровані недорогі безпілотні літальні апарати (БПЛА), а й БПЛА з повноцінним комп'ютером на борту, який буде керувати ним або виконуючи команди дані оператором, або виконуючи заздалегідь завантажене польотне завдання. Також безпілотні авіаційні системи мають незаперечні переваги перед пілотованими системами - відсутність пілота, дешевизна і малі розміри, через що вони неминуче зробили крок в цивільний сектор.
Використання БПЛА є досить актуальним напрямком розвитку для проведення моніторингу промислових об'єктів, аерофотозйомки, моніторингу надзвичайних ситуацій. Всі дані виходять автономно навіть з важкодоступних місць без загрози життю людини, при цьому вартість використання БПЛА набагато нижче, ніж при використанні пілотованих апаратів.
У зв'язку з цим, використання безпілотних літальних апаратів є найбільш ефективним засобом для моніторингу промислових об'єктів. Незважаючи на величезну кількість завдань, що вирішуються безпілотними літальними апаратами, їх застосування в країнах СНД значно менше ніж за кордоном, тому пошук можливостей використання та їх реалізація в нашій країні є найбільш актуальними.
2. Цілі і завдання дослідження
Метою даної дисертації є пошук можливостей застосування БПЛА для використання в цивільному секторі.
Для досягнення результатів були поставлені наступні завдання:
вибір апаратної частини комплексу управління та середовища розробки ПО
створення принципової схеми, її збірка і тестування
програмна реалізація алгоритмів управління БПЛА
тестування комплексу в цілому
усунення недоліків
Основними проблемами є:
вибір компонентів і корпусу для БПЛА;
вибір радіомодулів і частотного діапазону для управління БПЛА;
протоколи обміну інформацією між БПЛА і оператором;
дозвіл на використання повітряного простору.
У цивільному секторі найближчим часом найбільш затребуваними завданнями БПЛА будуть моніторинг та розвідка. Моніторинг промислових об'єктів зараз є однією з найбільш актуальних завдань, і в разі використання безпілотних авіаційних систем це допоможе заощадити багато грошей і часу, оскільки на старт БПЛА йде набагато менше часу ніж на старт пілотованого літального апарату і час перебування в повітрі може бути набагато більше за рахунок малих розмірів і малої маси. З фінансової точки зору витрати на обслуговування пілотованих літальних апаратів набагато більше, ніж на обслуговування безпілотних літальних апаратів.
З цього можна зробити висновок, що БПЛА будуть користуватися попитом при моніторингу промислових об'єктів і об'єктів великої протяжності, наприклад, різних складів, аграрних угідь, магістралей і трубопроводів.
3. Огляд типів БПЛА
Безпілотні літальні апарати є одними з найважливіших нововведень останніх років. На даний момент існує багато типів і різновидів БПЛА. Це все обумовлюється відмінністю потреб і завдань для яких вони розроблялися. Одні, наприклад, необхідні для аерофотозйомки заходів, кінозйомок, інші ж для польотів на великі відстані, інспекцій і моніторингу об'єктів великої протяжності. Ця різниця визначає розмір, вага і конструкцію. Існує кілька основних типів цивільних БПЛА.
БПЛА літакового типу - мають жорстке нерухоме крило, яке створює підйомну силу. Завдяки цьому вони легкі в управлінні, стійкі до жорстких погодних умов, мають можливість нести більше корисного навантаження, а також долати великі відстані з меншими енерговитратами. Сфери їх застосування - доставка невеликих вантажів, моніторинг об'єктів великої протяжності, тривалі місії. Однак він не підходить для виконання місій, в яких необхідна висока точність позиціонування, оскільки завжди повинен бути в русі для створення підйомної сили. Зовнішній вигляд даного типу БПЛА представлений на рисунку 3.1. [1]

Рисунок 3.1 - БПЛА літакового типу
БПЛА вертолітного типу - підйомна сила створюється гвинтом або декількома гвинтами. Перевагами цього типу є вертикальний зліт і посадка, зависання в повітрі, точного маневрування, але вони мають менший запас енергії і меншу дальність ходу. Дані БПЛА підходять для місій, в яких необхідна висока точність позиціонування, на кшталт перевірки стану залізниці, трубопроводів, будівель і тощо Зовнішній вигляд даного типу БПЛА представлений на рисунку 3.2. [2]
Мультіроторние БПЛА - то ж що і БПЛА вертолітного типу, але має більше несучих гвинтів.
Мультіроторние БПЛА поділяються на:
3 несучих гвинта (трікоптери);
4 несучих гвинта (квадракоптери);
6 несучих гвинтів (гексакоптери);
8 несучих гвинтів (октокоптери).
При цьому вони мають практично такі ж якостями, як гвинтокрилі, проте набагато стійкіше, більш маневрені і легкі в керованості. Призначенням мультіроторних БПЛА є місії, що вимагають особливої точності. Зовнішній вигляд даного типу БПЛА представлений на рисунку 3.3. [3]


4. Огляд завдань, які виконуються БПЛА
Після створення літаків і вертольотів вони зарекомендували себе як відмінний засіб для створення карт місцевості, розвідки нової місцевості, пошуку будь-яких будівель. Згодом розширилося коло їх застосування, але з цим і збільшилася небезпека для пілота. Також для того, щоб нести вага пілота літальний апарат повинен володіти розмірами, достатніми для розміщення пілота, а з цим збільшується маса, розміри тягової установки (двигуна) і споживання палива. [4]
На зміну пілотованим літальним апаратам прийшли безпілотні літальні апарати, які витримують велику температуру, великі перевантаження, при цьому споживаючи менше палива, маючи менші розміри і велику маневреність. Завдяки цьому деякі типи можуть навіть зробили роботу в замкнутих просторах, наприклад, в печерах або будівлях. [4 , 5]
Основними завданнями є картографування (рисунок 4.1) [6], розвідка місцевості (рисунок 4.2) [7], моніторинг об'єктів (рисунок 4.3) [8], охорона об'єктів (рисунок 4.4) [9]. Застосування БПЛА для даних задач істотно знижує вартість проведення робіт за рахунок економії палива, обслуговування «великого» літака і оплати праці пілотові. [5]


(анімація: 5 кадрів, 5 циклів повторення, 86.2 кілобайт)

Також БПЛА допомагають при порятунку життів виробляючи пошук людей (рисунок 4.5) [10], виявлення пожеж (рисунок 4.6) [11], надаючи допомогу в проведенні рятувальних операцій (рисунок 4.7) [12].



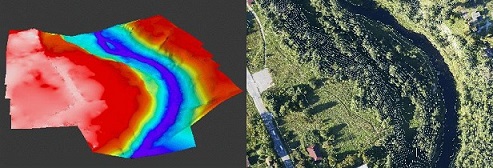
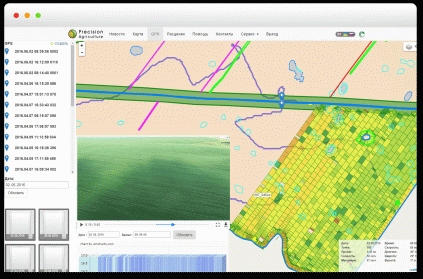
Сільське господарство також використовує БПЛА для обстеження полів (рисунок 4.8) [13], що дозволяє уникнути помилок в розрахунках на закупівлю зерен близько 10-20%, які неминучі при використанні карт, а також для оцінки стану посівів (рисунок 4.9) [14] і моніторингу аграрних заходів (рисунок 4.10) [15]. [16]
Застосування БПЛА для сільського господарства допомагає вирішувати наступні завдання: [15]
створення і оновлення в електронному вигляді карт і планів оброблюваних земель
облік сільськогосподарських угідь
планування посівних робіт по виробничих дільниць
контроль обсягу і якості проведення польових робіт
ведення оперативного моніторингу стану посівних культур
оцінка схожості сільськогосподарських культур
прогноз врожайності сільськогосподарських культур
контроль якості збору врожаю
охорона посівів від крадіжки
економічна оцінка
ведення екологічного моніторингу сільськогосподарських угідь
розрахунок обсягу внесених добрив і т.п.


5. Огляд наявних на ринку технічних рішень для автономного управління БПЛА
В даний момент на ринку представлено досить багато рішень для автономного управління БПЛА. Деякі мають відкриту платформу з можливістю доопрацювання під конкретні цілі та завдання, інші ж мають закриту платформу і дозволяють робити тільки те, що заклав в неї виробник, не дозволяючи модифікувати систему. Далі будуть розглянуті обидва різновиди систем
Відкриті системи представлені такими:
ArduPilot Mega 2.6;
Openpilot CC3D;
MultiWii SE v2.5.
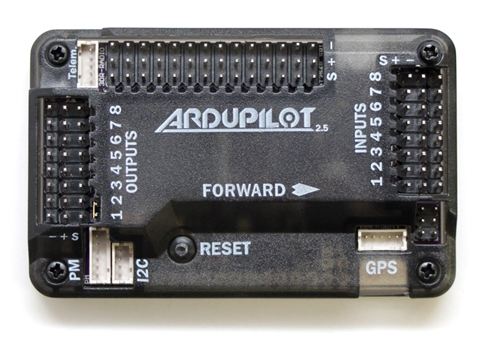
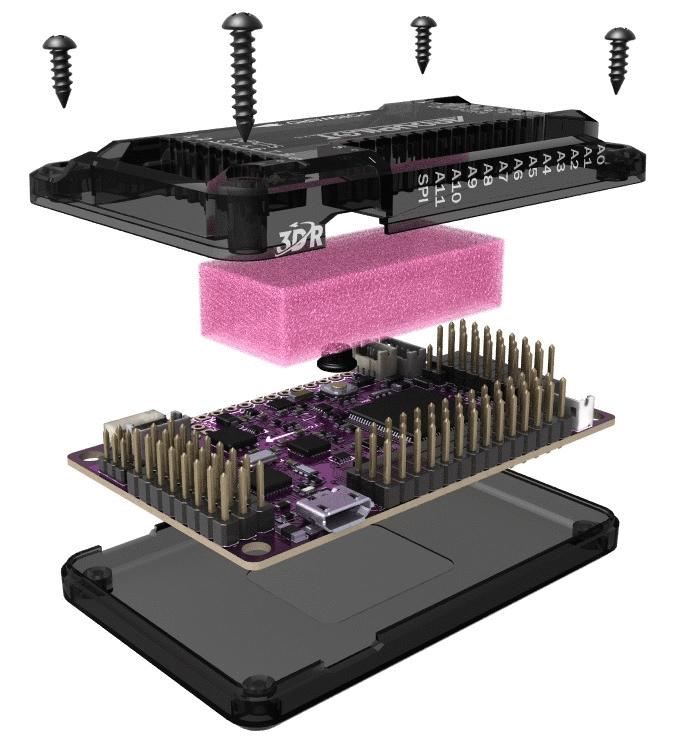
ArduPilot Mega 2.6 є одним з найпотужніших і популярних комплексів управління БПЛА. Містить в собі не тільки керуючий мікроконтролер, але і набір різних датчиків, а саме - барометр і акселерометр-гіроскоп, на підставі даних, отриманих з цих датчиків, виконується управління польотом. Зовнішній вигляд контролера представлений на рисунках 5.1 і 5.2. [17]
Даний контролер може управляти не тільки БПЛА, а й наземними, водними і підводними безпілотними апаратами, що є в дуже малій кількості контролерів
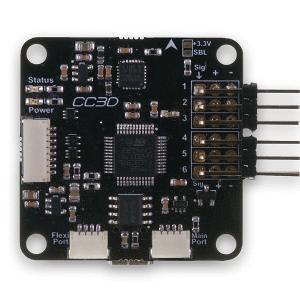
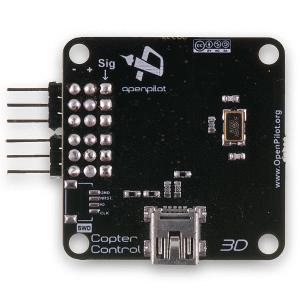
Openpilot CC3D - побудований на базі більш потужного, ніж ArduPilot Mega 2.6, мікроконтролера STM32. Також дозволяє управляти великим числом безпілотних апаратів, але тільки літальних. За рахунок більш потужного мікроконтролера може швидше виконувати команди, що важливо для повністю автономного управління БПЛА. Зовнішній вигляд представлений на рисунках 5.3 і 5.4. Розміри і вага менше, ніж у ArduPilot Mega 2.6, але і набір датчиків теж, тому що відсутній барометр, який використовується для визначення висоти. [18]
За рахунок своїх масогабаритних характеристик ідеально підходить для використання в мікро-БПЛА, наприклад, для польотів в будівлях або обстеження тунелів
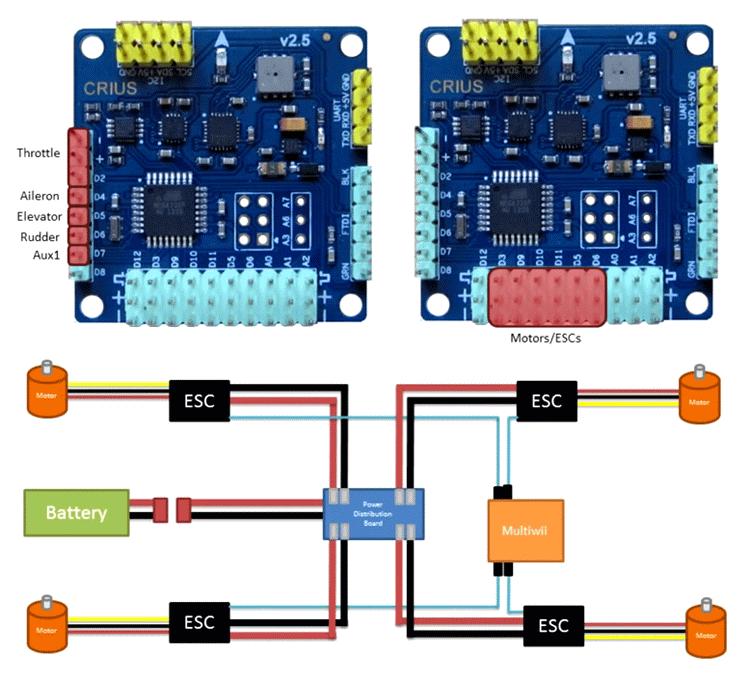
MultiWii SE v2.5 заснований на Arduino, як і ArduPilot Mega 2.6, але поступається йому за можливостями, хоча і має такий же набір датчиків. Спочатку підходив тільки для БПЛА аматорського рівня, але за рахунок відкритості вихідного коду ПЗ за допомогою спільноти розвинувся до пристойного рівня і може конкурувати з іншими. Також, як і Openpilot CC3D, має малі розміри і вага і може використовуватися в мікро-БПЛА. Зовнішній вигляд представлений на рисунку 5.5
Характеристики та можливості даних контролерів представлені у вигляді порівняльних таблиць - таблиця 5.1 і таблиця 5.2 відповідно. [19]
Таблиця 5.1 - Характеристики відкритих польотних контролерів
|
№ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблиця 5.2 - Можливості відкритих польотних контролерів
|
№ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Windows / Mac / |
Windows / Mac / |
Windows / Mac / |
Також є поділ за типами безпілотних апаратів, якими може керувати комплекс. Ці типи представлені в таблиці 5.3. [19]
Таблиця 5.3 - Типи безпілотних апаратів, якими може керувати комплекс
|
№ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таким чином, за даними таблиць можна зробити Висновки, що комплекс управління ArduPilot Mega 2.6 має більший набір можливостей, ніж Openpilot CC3D і MultiWii SE v2.5, але при цьому має великі розміри і вага
6. Огляд компонентів для розробки програмного комплексу управління БПЛА
Головним компонентом програмного комплексу управління БПЛА є головний обчислювальний центр. Раніше використовувалися мікроконтролери, які мали малий функціонал, але з розвитком технологій з'явилися комп'ютери розміром з трохи більше мікроконтролерів - мікрокомп'ютери.
Першим масовим з них став Raspberry Pi Model A, після якого почали з'являтися вдосконалені версії, характеристики яких представлені в таблиці 6.1, а зовнішній вигляд представлений на рисунку 6.1. [20 , 21]
Таблиця 6.1 - Характеристики Raspberry Pi
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|

Цей мікрокомп'ютер зробив революцію в світі електроніки, дозволивши використовувати відносно великі обчислювальні потужності в маленьких пристроях, що дало можливість створювати автономні системи без використання ПК
На хвилі популярності Raspberry Pi почали з'являтися безліч його «клонів», з більшою продуктивністю, але недостатньою підтримкою з боку виробника. Згодом стали випускатися нормально працюють мікрокомп'ютери, які по співвідношенню ціна / можливості значно перевершують оригінал.
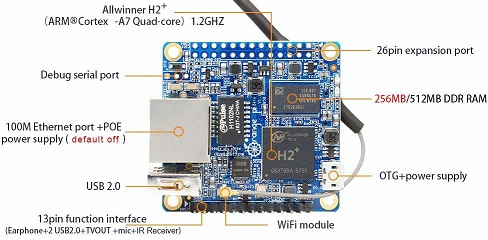
Одним з найбільш вдалих аналогів Raspberry Pi для вбудованих систем, тобто систем в яких нема потреби виведення зображення на монітор, є Orange Pi Zero. Характеристики якого представлені в таблиці 6.2, а зовнішній вигляд на рисунку 6.2. [22]
Таблиця 6.2 - Характеристики Orange Pi Zero
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Даний мікрокомп'ютер володіє 3 USB портами, що дозволяє підключати до нього різні периферійні пристрої, наприклад, камери, різні модулі, що запам'ятовують пристрої і тощо Також маю 26 портів введення-виведення загального призначення, серед яких є I2C, SPI, UART, завдяки яким є можливість підключати різні датчики, радіомодулі, камери і тощо [22]
З датчиків необхідними є датчики положення в просторі, а саме акселерометр-гіроскоп, компас, барометр і GPS-модуль, а в якості радиомодуля можна використовувати як WiFi радіомодуль, так і будь-який інший, оскільки є можливість взаємодії з практично будь-яким протоколом передачі.
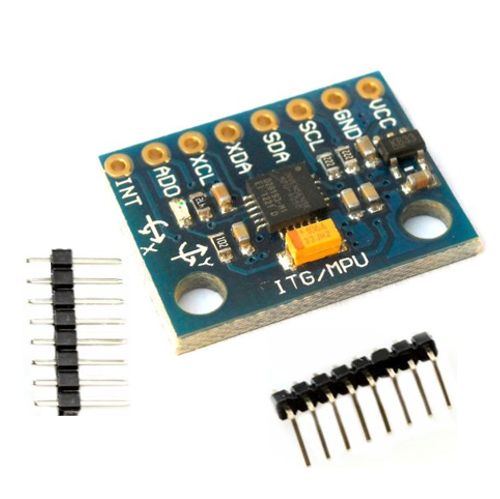
Акселерометр-гіроскоп призначений для визначення кутів відхилення літального апарата щодо площини Землі. Це необхідно для можливості автоматичного управління або управління з поганою видимістю. Як датчик акселерометра-гіроскопа можна використовувати модуль акселерометра-гіроскопа MPU6050, зовнішній вигляд якого представлений на рисунку 6.3, а характеристики в таблиці 6.3. [23]
Таблиця 6.3 - Характеристики модуля акселерометра-гіроскопа MPU-6050
|
№ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
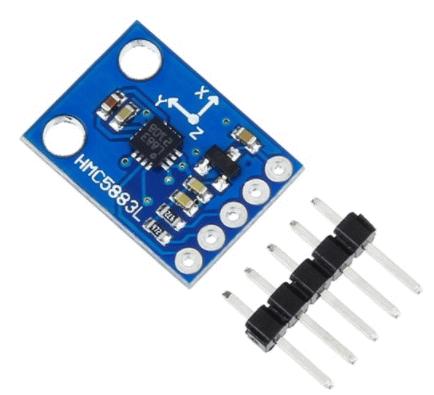
Електронний компас використовується для визначення кута напрямку руху літального апарату і можливості зміни напрямку руху. На ринку існує кілька варіантів модулів електронного компаса, але одним з відомих є HMC5883L, характеристики якого представлені в таблиці 6.4, а зовнішній вигляд представлений на рисунку 6.4. [24]
Таблиця 6.4 - Характеристики модуля компаса HMC5883L
|
№ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
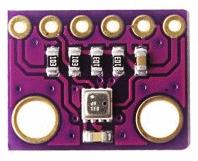
Електронний барометр призначений для вимірювання атмосферного тиску, але оскільки на різній висоті тиск різний, то ще є можливість вимірювання барометричної висоти необхідної для автономного управління БПЛА, стеження за його висотою і виключення незапланованого зіткнення з поверхнею Землі. Для комплексу управління пропонується використовувати модуль барометра Bosch BMP-280. Характеристики вказані в таблиці 6.5, зовнішній вигляд представлений на рисунку 6.5. [25]
Таблиця 6.5 - Характеристики модуля барометра BMP-280
|
№ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Найважливішим модулем, без якого стає неможливим автономне управління БПЛА є GPS-модуль. Він служить для визначення координат розташування літального апарату, його швидкості та напрямку руху. На ринку існує безліч різних модулів, більшість з них підтримують роботу не тільки з GPS, але і з ГЛОНАСС і Beidou. Це підвищує точність, але вартість цих модулів досить висока. Як GPS-модуля можливо застосовувати Ublox NEO-6M. Характеристики представлені в таблиці 6.6, а зовнішній вигляд на рисунку 6.6. [26]
Таблиця 6.6 - Характеристики GPS-модуля барометра Ublox NEO-6M
|
№ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Висновки
Таким чином, що розробляється БПЛА зможе вести практично безперервний моніторинг стану об'єктів маючи малі розміри і вартість, при цьому не вимагаючи постійного контролю з боку персоналу. За рахунок модульної системи існує можливість переоснастити його для виконання інших завдань.
На поточному етапі дослідження отримані наступні результати:
проаналізовані існуючі комплекси управління БПЛА, вивчені переваги і недоліки;
обрані комплектуючі та розроблено структурну схему апаратної складової комплексу управління БПЛА, яка була зібрана і запущена;
описані базові алгоритми читання інформації з датчиків і управління БПЛА;
обрані матеріали корпусу і тип БПЛА для забезпечення малої ваги і необхідних льотних характеристик.
На наступному етапі планується побудувати БПЛА, встановивши на нього комплекс управління, і провести льотні випробування з подальшим доопрацюванням як програмної, так і апаратної частин.
При написанні даного реферату магістерська дисертація ще не завершена. Остаточне завершення: травень 2018 року. Повний текст роботи та матеріали по темі можуть бути отримані у автора або його керівника після зазначеної дати.
Список джерел
АВАКС [Электронный ресурс]: GAMMA – электронные данные, – режим доступа http://uav-siberia.com/catalog/product/gamma/ – дата доступа: сентябрь 2017.
"КБ ИНДЕЛА" [Электронный ресурс]: Беспилотный летательный аппарат INDELA-I.N.SKY – электронные данные, – режим доступа http://www.indelauav.com/product_insky.html – дата доступа: сентябрь 2017.
DJI Drone.UA-официальный дилер DJI в Украине [Электронный ресурс]: Inspire 2 – электронные данные, – режим доступа http://drone.ua/dji/shop/dronyi-dji/inspire/kvadrokopteryi-inspire/inspire-2/ – дата доступа: сентябрь 2017.
ZALA AERO GROUP [Электронный ресурс]: Применение беспилотников (беспилотных летательных аппаратов, БПЛА) – электронные данные, – режим доступа http://zala.aero/primenenie/ – дата доступа: сентябрь 2017.
Моисеев В.С. Основы теории эффективного применения беспилотных летательных аппаратов: монография. – Казань: Редакционно-издательский центр «Школа», 2015. 444 с. (Серия «Современная прикладная математика и информатика»).
Современные геоинформационные решения [Электронный ресурс]: Аэрофотосъемка с использованием беспилотного летательного аппарата – электронные данные, – режим доступа http://www.ark-on.ru/about/item119/ – дата доступа: сентябрь 2017.
Российская авиация [Электронный ресурс]: Тактический БПЛА «ГрАНТ» – электронные данные, – режим доступа http://авиару.рф/aviamuseum/aviatsiya/rf/bpla/takticheskij-bpla-grant/ – дата доступа: октябрь 2017.
РУСГЕОКОМ [Электронный ресурс]: Мониторинг трубопроводов и объектов нефтегазовой промышленности – электронные данные, – режим доступа http://www.rusgeo.com/distanczionnyij-kontrol-za-sostoyaniem-obektov-nefte-i-gazodobyivayushhej-promyishlennosti – дата доступа: сентябрь 2017.
ОАО «АГАТ-системы управления» [Электронный ресурс]: Услуги с использованием беспилотных летательных аппаратов (БЛА) – электронные данные, – режим доступа http://www.agat.by/products/robotic-platforms/unmanned-aircraft-complex/uav-service/ – дата доступа: сентябрь 2017.
AEROSCANAVIA [Электронный ресурс]: Аэрофотосъемка с БПЛА в разных сферах бизнеса – электронные данные, – режим доступа http://aeroscanavia.ru/ – дата доступа: октябрь 2017.
СъемкаСВоздуха.РФ [Электронный ресурс]: АЭРОФОТОСЪЕМКА В ЛЕСНОМ ХОЗЯЙСТВЕ – электронные данные, – режим доступа http://СъемкаСВоздуха.РФ/otrasli/bpla-v-leskhoze-i-rybnadzore.html – дата доступа: октябрь 2017.
РИЦ [Электронный ресурс]: ЧРЕЗВЫЧАЙНЫЕ СИТУАЦИИ – электронные данные, – режим доступа http://dronesystems.ru/application/alert – дата доступа: октябрь 2017.
PreAgri [Электронный ресурс]: Возможности PreAgri – электронные данные, – режим доступа https://preagri.com/features.htm – дата доступа: октябрь 2017.
MIT Technology Review [Электронный ресурс]: Six Ways Drones Are Revolutionizing Agriculture – электронные данные, – режим доступа https://www.technologyreview.com/s/601935/six-ways-drones-are-revolutionizing-agriculture/ – дата доступа: октябрь 2017.
РУСГЕОКОМ [Электронный ресурс]: Использование беспилотников для нужд сельского хозяйства – электронные данные, – режим доступа http://www.rusgeo.com/ispolzovanie-bpla-dlya-nuzhd-selskogo-xozyajstva – дата доступа: октябрь 2017.
РИЦ [Электронный ресурс]: СЕЛЬСКОЕ ХОЗЯЙСТВО – электронные данные, – режим доступа http://dronesystems.ru/application/sh – дата доступа: ноябрь 2017.
ArduPilot.org [Электронный ресурс]: Archived:APM 2.5 and 2.6 Overview – электронные данные, – режим доступа http://ardupilot.org/copter/docs/common-apm25-and-26-overview.html – дата доступа: ноябрь 2017.
LibrePilot/OpenPilot Wiki [Электронный ресурс]: CopterControl / CC3D / Atom Hardware Setup – электронные данные, – режим доступа http://opwiki.readthedocs.io/en/latest/user_manual/cc3d/cc3d.html – дата доступа: ноябрь 2017.
MosHobby [Электронный ресурс]: Полётные контроллеры – электронные данные, – режим доступа http://moshobby.ru/magazin-2/folder/poletnyye-kontrollery – дата доступа: ноябрь 2017.
Raspberry Pi – Википедия, свободная энциклопедия [Электронный ресурс]: – режим доступа https://ru.wikipedia.org/wiki/Raspberry_Pi – дата доступа: декабрь 2017.
Adafruit Industries, Unique & fun DIY electronics and kits [Электронный ресурс]: Raspberry Pi Model A – электронные данные, – режим доступа https://www.adafruit.com/product/1344 – дата доступа: декабрь 2017.
Orangepi [Электронный ресурс]: OrangePi Zero – электронные данные, – режим доступа http://www.orangepi.org/orangepizero/ – дата доступа: декабрь 2017.
emartee.com [Электронный ресурс]: MPU-6050 3 Axis Gyroscope And Accelerometer Module – электронные данные, – режим доступа http://www.emartee.com/product/42257/MPU%206050%203%20Axis%20Gyroscope%20And%20Accelerometer%20Module – дата доступа: декабрь 2017.
addicore.com [Электронный ресурс]: HMC5883L Triple-Axis Magnetometer Compass Module GY-273 – электронные данные, – режим доступа https://www.addicore.com/HMC5883L-Module-p/ad306.htm – дата доступа: декабрь 2017.
ARDU.NET [Электронный ресурс]: Модуль датчик давления arduino module bmp280 Pressure Sensor – электронные данные, – режим доступа http://ardu.net/ru/datchiki-i-sensory/363-modul-bmp280-i2c-datchik-davleniya-i-temperatury-module-pressure-novinka-spi-120768573.html – дата доступа: декабрь 2017.
addicore.com [Электронный ресурс]: u-blox NEO-6M GY-GPS6MV2 GPS module with on board EEPROM – электронные данные, – режим доступа https://www.addicore.com/NEO-6M-GPS-p/231.htm – дата доступа: декабрь 2017.