
Содержание
- Вступ
- 1. Актуальність теми
- 2. Мета роботи
- 3. Аналіз структури системи
- 3.1 Обгрунтування вибору датчика та принцип його дії
- 3.2 Обгрунтування вибору структурної схеми
- 4. Методи програмного визначення амплітуди
- 4.1 Дискретне перетворення Фур'є
- 4.2 Среднєквадратичне значення
- 4.3 Тригонометрична апроксимація
- 4.4 Вибор методу визначення амплітуди
- Висновки
- Список источников
Вступ
Останнім часом на хлібовиробничих підприємствах все більшої популярності набуває безтарний метод зберігання борошна. Причина підвищення популярності безтарного методу в тому, що безтарне зберігання і транспортування борошна (БЗБ), на відміну від тарного способу зберігання і транспортування має ряд переваг:
- виключення важких фізичних робіт, весь процес механізовано;
- можлива автоматизація процесу (Автоматизація складів БЗБ);
- економія на тарі (мішках);
- зменшується розпил (втрати) борошна;
- борошно аерується, поліпшується його якість;
- поліпшується санітарний стан виробництва хлібобулочних виробів;
- знижуються експлуатаційні витрати;
- для великих і середніх хлібобулочних підприємств економиться електроенергія;
- економиться площа.
1. Актуальність теми
Прибуток підприємства в чималому ступені залежить від того, за якою ціною і в якій кількості закуплене борошно і як раціонально воно витрачено. Крім того, суб'єктивна оцінка кількості борошна дає велику похибку визначення залишків (до двох-трьох тонн на силос). Справа в тому, що різні сорти борошна мають різну щільність, і якщо житнього борошна в силос можна завантажити до 30-31 тонни, то борошна вищого сорту – до 35 тонн. Крім того, в процесі відкачування борошна в нижній конусоподібній частині силосу утворюються порожнечі, іноді великі за обсягом, які не видно зверху крізь товщу борошна навіть з ліхтарем. Ось чому, важливого значення набуває автоматизація завдання змінного і добового обліку приходу-витрати борошна. У проекті хлібозаводів, що вводилися в експлуатацію на початку 70-х років, така автоматизація передбачалася на основі технічних засобів, що були в той час. На одних заводах автоматизація впроваджувалася, але погано працювала або не працювала зовсім, на інших заводах не впроваджувалася, хоча й була передбачена в проекті.
2. Мета роботи
Метою роботи є розробка системи, що дозволяє в режимі реального часу слідкувати за кількістью борошна в кожному силосі, за допомогою сучасних апаратно-програмних засобів.
3. Аналіз структури системи
Основна ідея побудови системи полягає тому, щоб за заданим розкладом, або на вимогу оператора, фіксувати поточне значення ваги силосів, і зберігати його у базу даних.
3.1 Обгрунтування вибору датчика та принцип його дії
В якості первинного вимірювального перетворювача, обраний магнітоанізотропний датчик. Перевагами магнітоанізотропних перетворювачів сили є висока чутливість і власна частота коливань, потужність і рівень вихідного сигналу, досить велика точність вимірювання, надійність конструкції, простота і дешевизна виготовлення, низька чутливість до температури навколишнього середовища.[1]
Принцип дії магнітоанізотропних датчиків полягає в наступному. Під впливом зовнішніх механічних напружень, магнітні властивості матеріалу змінюються в усіх напрямках з різною інтенсивністю і різними знаками, залежно від величини зовнішнього магнітного поля, тобто магнітна анізотропія матеріалу змінюється. На цьому і заснований принцип дії магнітоанізотропних датчиків.
Датчики влаштовані наступним чином. У замкнутому магнітопроводі розташовані дві взаємно перпендикулярні обмотки (рис.1). Для цього, у магнітопроводі для обмоток робляться чотири отвори, розташовані симетрично по кутах квадрата або прямокутника. Кожна з обмоток укладається в два діагонально протилежних отвори. Навантаження, що вимірюється, прикладається під кутом 45° до плоскості кожної обмотки.
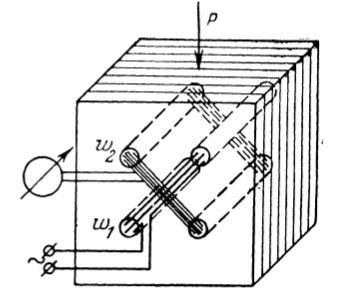
Рисунок 1 – Магнітоанізотропний датчик
Намагнічующа обмотка ω1 живиться змінним струмом. До другої обмотки ω2 (вимірювальної), підключається вимірювальний прилад, або інший чутливий орган.
При протіканні змінного струму по намагнічующій обмотці, створюється магнітний потік, характер розподілу якого показаний на рис.2.[2]
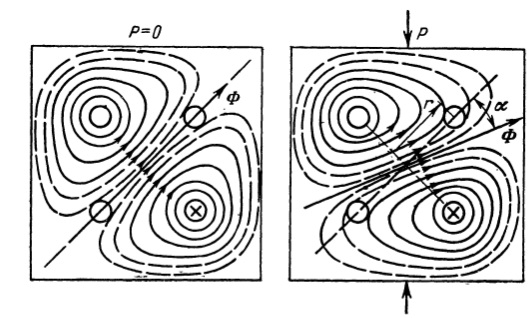
Рисунок 2 – Характер розподілу магнітного потоку в датчику
Якщо магнітопровод датчика виконаний з магнітноізотропного матеріалу і отвори розташовані симетрично, то при відсутності навантаження, магнітні лінії потоку, замикаючись, не перетинають вимірювальну обмотку, і тому не індукують в ній е.р.с.
3.2 Обгрунтування вибору структурної схеми
Один з вариантів побудови структурної схеми представлений на рис.3
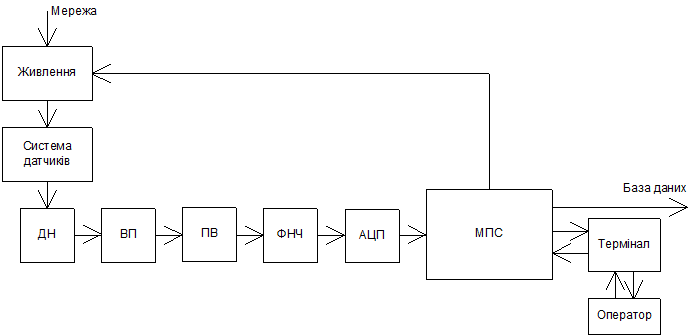
Рисунок 3 – Структурна схема
У даній структурній схемі блок живлення являє собою генератор синусоїдального сигналу, з частотою генерації, яка дорівнює 400 Гц, що живиться від мережі.
Блок системи датчиків складається з усіх датчиків використаних в системі, їх обмотки збудження підключені паралельно, а вимірювальні обмотки підключені послідовно по чотири, відповідно датчикам, використовуваним для зважування одного силосу, і паралельно по відношенню до решти. Вихід кожної групи з чотирьох датчиків підключається до дільника напруги, так як сума вихідних сигналів датчика може досягати дуже великих значень.
З дільника напруги, сигнал подається на вимірювальний підсилювач, який представляє собою двохкаскадний диференційний підсилювач на трьох операційних підсилювачах. Він забезпечує ефективне придушення синфазної перешкоди, а також має дуже високу вхідну напругу, і низьку вихідну. Потім сигнал випрямляється за допомогою прецизійного випрямляча, який представляє собою двонапівперіодний детектор средневипрямленної напруги з одним випрямляючим вузлом. Випрямлений сигнал подається на активний фільтр низьких частот(ФНЧ) другого порядку, який виконує одночасно три функції:
- придушення високочастотної перешкоди;
- згладжування випрямленого сигналу;
- приведення діапазону вихідного сигналу до діапазону вимірювання АЦП;
З ФНЧ сигнал передається до мікроконтролеру з вбудованим АЦП, в якому значення напруги перетворюється в значення ваги силосу і виводиться у термінал та у базу даних підприємства. Опитування силосу може проводитися як в плановому режимі, згідно з розкладом, так і на вимогу оператора.
Однак, завдання визначення амплітуди сигналу можна вирішити і іншим способом. Структурна схема альтернативного методу приведена на рис.4:
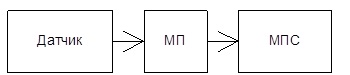
Рисунок 4 – Альтернативна структурна схема вимірювального каналу
Де МП – маштабуючий перетворювач.
У даній схемі передбачається, що сигнал датчика перетворюється в зручну для оцифровки форму за допомогою МП і подається на аналоговий вхід мікроконтролера. При такій схемі, на вхід мікроконтролера діє гармонійний сигнал, і тому використання миттєвого значення не має сенсу, однак, якщо провести серію вимірів, і сформувати з результатів вимірів масив часових відліків, то стає можливим програмне визначення амплітуди вимірюваного сигналу. На рис.5 наведено приклад реалізації даного методу:
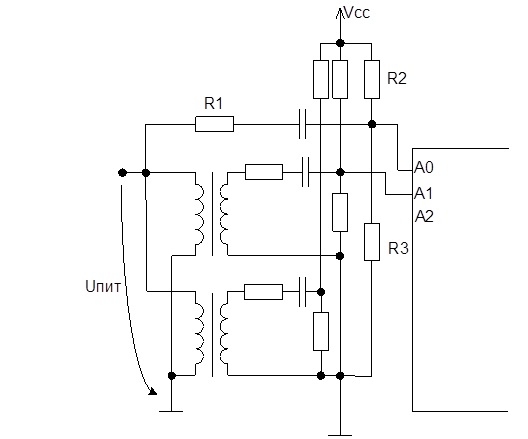
Рисунок 5 – Схемотехнічна реалізація альтернативного методу
У якості датчиків тут виступають магнітоанізотропні датчики тиску, які позначені як трансформатори. Оскільки дані датчики мають високе значення амплітуди сигналу, у якості маштабуючого перетворювача можна застосувати резистивний дільник. Однак, якщо просто знизити амплітуду сигналу, то на вхід мікроконтролера надійде тільки одна півхвиля синусоїди. Для того, щоб МК правильно приймав сигнал, необхідно забезпечити зміщення. Таким чином, резистори R2 і R3 задають постійний зсув, який дорівнює половині від максимального рівня, що сприймається МК, а R1 та R3 являються дільником напруги, який знижує амплітуду сигналу. Таким чином на вхід МК діє сигнал, осцилограмма якого наведена на рис.6:
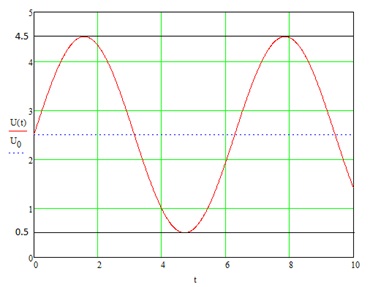
Рисунок 6 – Осцилограмма вхідного сигналу
На рис.6. видно, що постійний зсув сигналу становить 2.5В, а максимально допустима амплітуда вхідного сигналу становить 2В.
Таким чином, при реалізації альтернативного методу побудови вимірювального каналу, стає можливим досягнення ряду переваг:
- серйозне спрощення апаратної частини;
- збільшення надійності схеми, за рахунок зниження числа компонентів, що входять до її складу;
- виключення похибок, що вносяться вимірювальним каналом;
- повне виключення високочастотних і низькочастотних завад;
- збільшення швидкодії системи, за рахунок того, що в ФНЧ, для отримання постійного рівня сигналу, потрібен конденсатор великої ємності, через що час проведення заміру може становити до 0,2 с;
- замір відбувається не тільки амплітуди на вимірювальній обмотці датчика, але і на живильній обмотці, що дозволяє так само відстежувати зміну напруги живлення датчика, і вносити корекцію в обробку результатів. Це істотно знижує вимоги до точності забезпечення амплітуди генератора напруги сигналу.
4. Методи програмного визначення амплітуди
У разі, коли потрібно програмно визначити амплітуду гармонічного сигналу з масиву часових відліків, важливим завданням є вибір методу, який найкраще підходить для цього, виходячи з умов, при яких масив відліків був сформований. Так наприклад, метод прямого визначення розмаху гармоніки, шляхом визначення максимального і мінімального значення у масиві, матиме високу похибку, якщо в сигналі буде присутня перешкода, або якщо на один період гармоніки припадатиме недостатня кількість точок.
Розглянемо кілька методів визначення амплітуди гармонійного сигналу, а також їх переваги та недоліки.
4.1 Дискретне перетворення Фур'є
У загальному випадку, дискретне перетворення Фур'є(ДПФ) застосовується для спектрального аналізу сигналів, і має вигляд[3]:
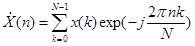 (1)
(1)Однак в даному випадку нас цікавить не весь спектр сигналу, а тільки один спектральний відлік, і тому, обчислювати ДПФ для всього спектра недоцільно, тим паче, що це може зайняти досить багато часу. З цієї причини, замість повного, варто використовувати ДПФ для одного спектрального відліку.
Для реалізації такого підходу, слід вибрати період дискретизації сигналу таким чином, щоб в одному періоді сигналу було ціле число часових відліків. В такому випадку, номер шуканої гармоніки буде дорівнвати якраз числу часових відліків, що припадають на період сигналу.
При цьому, важливо розуміти, що отримане в результаті ДПФ значення амплітуди сигналу буде пропорційно відрізнятися від реальної амплітуди сигналу. Для визначення цієї пропорції, слід так само виконати ДПФ для нульової гармоніки. Отримане значення нульової гармоніки використовуємо в якості опорного значення, тому що відомо, що воно відповідає подвоєному значенню постійної складової. Тоді формула визначення амплітуди шуканої гармоніки:
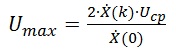 (2)
(2)Де k – номер шуканої гармоніки.
Переваги цього методу полягають в тому, що можна з високою точністю визначити значення амплітуди сигналу, при цьому повністю ігноруючи весь спектр сигналу, окрім єдиної частоти, що зручно в ситуаціях, коли мають місце наведення, або високочастотні шуми.
Однак, для того, щоб виконати умову цілого числа часових відліків на період сигналу, потрібно дуже точно знати частоту даної гармоніки (з точністю не гірше 0,01%), інакше, в силу дуже високої крутизни характеристики, буде велика похибка. Тому даний метод підходить тільки в тих випадках, коли є можливість заздалегідь з високою точністю визначити частоту сигналу, або коли сигнал генерується джерелом з дуже високою стабільністю частоти.
4.2 Среднєквадратичне значення
В даному методі, амплітудне значення гармоніки визначається за формулою[4]:
 (3)
(3)Важливою особливістю методу є те, що для досягнення максимальної точності, рекомендується використовувати ціле число періодів сигналу, однак за допомогою програмних засобів можна легко визначити в масиві точки, які найзручніше приймати за початкову і кінцеву.
Крім того, важливою особливістю є те, що для реалізації даного методу не обов'язково задавати сигналу постійний зсув, щоб весь розмах гармоніки входив в діапазон виміру АЦП. Навпаки, можна пропустити сигнал через розділовий конденсатор, або фільтр високих частот(ФВЧ) перед оцифруванням. Для отриманого однопівперіодного сигналу амплітуда дорівнює:
 (4)
(4)Такий підхід може виявитися корисним, якщо використовується АЦП з малою розрядністю, тому що весь діапазон АЦП може працювати на одну півхвилю гармоніки, замість повного розмаху.
4.3 Тригонометрична апроксимація
В основі цього методу лежить ідея інтерполяції поліномом Фур'є, який має вигляд[5]:
 (5)
(5)Однак використання такого полінома мало чим відрізняється за змістом від звичайного аналізу Фур'є, і при врахуванні того, що передбачуваний сигнал гармонійний, для отримання амплітуди сигналу, досить програмно виключити постійну складову з сигналу і розрахувати коефіцієнт a за формулою:
 (6)
(6)Як і у випадку з ДПФ, для реалізації даного методу необхідно заздалегідь знати частоту сигналу, однак вимоги до точності тут значно нижче (точність визначення частоти повинна бути не гірше 0,1%). Крім того, важливо стежити за тим, щоб фаза апроксимуючої синусоїди збігалася з фазою досліджуваної гармоніки. Так само, для максимальної точності, слід вибирати з вихідного масиву даних такий фрагмент для аналізу, при якому першою точкою буде початок періоду, а останньою – кінець періоду.
Одним з важливих переваг методу є компенсація похибки квантування, так при моделюванні даного алгоритму, виявлено, що гармонійний сигнал, оцифрований за допомогою 32 рівнів квантування, може бути відновлений з точністю до десятих частин відсотка, якщо на один період сигналу доводиться не менше сотні точок.
4.4 Вибор методу визначення амплітуди
Так як датчик має велике значення вихідної напруги, співвідношення сигнал-шум досить високе і тому немає потреби у використанні складних алгоритмів, що дозволяють ігнорувати шуми. Тому, більш раціональним виглядає метод визначення середньоквадратичного значення. Крім того, однією з переваг альтернативної схеми побудови вимірювального каналу є зниження вимог до апаратної частини, чому даний метод так само сприяє, так як при ньому відсутня необхідність в точному значенні частоти вимірюваного сигналу. Досить тільки того, щоб початкова і кінцева точки інтервалу дослідження були рівні середнього рівня сигналу (для двопівперіодного).
Висновок
У даній роботі був описаний метод здійснення обліку витрати борошна. Обрано датчик, за допомогою якого буде визначатися значення маси силосу і запропоновано два варіанти побудови вимірювального каналу. Так само, для варіанта вимірювального каналу, що спирається на програмне визначення значення вихідного сигналу датчика, проведено огляд трьох методів обчислення амплітуди сигналу і обрано той, який є більш раціональним, виходячи з умов поставленого завдання.
При написанні даного реферату магістерська робота ще не завершена. Остаточне завершення: червень 2018 року. Повний текст роботи та матеріали по темі можуть бути отримані у автора або його керівника після зазначеної дати.
Перелік джерел
- Дубинин А.Е. Магнито-анизотропные преобразователи силы. – М.: Энерноатомиздат, 1991. – 112с.
- Шевченко Г.И. Магнито-анизотропные датчики. – М.: Энергия, 1967. – 73с.
- Александров В.А. Преобразование Фурье: Учеб. пособие. Новосибирск: НГУ, 2002. – 62 с.
- Р.Фано Передача информации. Статическая теория связи. Пер. с англ. И.А.Овсеевича и М.С. Пинскера, под науч. ред. Р.Л.Добрушина. М.: Мир, 1965. – 440с.
- Вержбицкий В.М. Численные методы. – М.: Высшая школа, 2001. – 382с.
- Бауманн Э. Измерение сил электрическими методами. – М.: Мир, 1978. – 423с.