
Дослідження і вдосконалення методики високоточного нівелювання із застосуванням цифрових нівелірів
зміст
- 1. Актуальність теми дослідження
- 2. Цілі і завдання досліджень
- 3. Конструкція і принцип відліку цифрових нівелірів
- 4. Рейки цифрових нівелірів
- 5. Вимоги до високоточного нівелювання
- 6. Процес виконання вимірювань
- 7. Висновки
- Список джерел
1. Актуальність теми дослідження
Необхідність вдосконалення методики
високоточного нівелювання системою
цифровий нівелір – штрих–кодова рейка
обумовлюється тим, що при виконанні цього
виду геодезі¬ческіх робіт на результати
виміряних перевищень значний вплив мають
різні джерела помилок, до яких відносяться
вплив вертикальної рефракції приземного шару
атмосфери, різна освітленість штрих–кодових рейок,
заряд акумулятора, вертикальність рейки.
На практиці найбільше застосування за характером впливу вертикальної рефракції приземного шару атмосфери отримав наступний підхід: вплив рефракції практично однаково при взятті відліку по рейках і на вимірюваний перевищення на нівелірної станції воно носить випадковий характер. Послаблюється залишкове вплив вертикальної рефракції нівелюванням з середини і соответствующей програмою вимірювання перевищення на нівелірної станції.
В існуючих нормативних документах мають бути вказані вимоги для виконання нівелювання з урахуванням впливу рефракції приземного шару атмосфери, до яких відносяться час виконання вимірювання, висота візирного променя над підстилаючої поверхнею (п'ятою рейки) і програма взяття відліку по рейках. Слід також зазначити, що умови виконання високоточного нівелювання в польових умовах, в містах і на промислових площадках істотно розрізняються між собою [1].
Основними перевагами цифрової вимірювальної
техніки перед аналоговою є: швидкість вимірювань,
висока точність, зручність отримання первинних даних
і їх автоматична обробка, а також практично повне
виключення людського фактора
, аж до досягнення
кінцевого результату роботи. традиційним оптичним
нівелірам прийшли цифрові (кодові) нівеліри. В
основі визначення перевищень цифровим нівеліром
лежить той же принцип, що і в класичних оптичних
нівелірах. Однак замість звичайної рейки використовується
спеціальна, кодова
, рейка, а замість аналізатора,
що визначає положення візирної осі нівеліра на рейці,
не око людини, а матричний фотодетектор. Завдання
оператора полягає лише в наведенні оптичної труби
нівеліра на рейку, після чого автоматично розпізнається,
обробка та аналіз зображення, і, нарешті, видача
результату [2].
Внаслідок цього, виникає необхідність в проведенні ряду досліджень щодо вдосконалення методики виконання високоточного нівелювання, що виконується ЦН, що включає в себе дослідження впливу вертикальної рефракції приземного шару атмосфери при різних температурних режимах на вимірювані перевищення, а також вдосконалення програми спостереження на нівелірної станції. Це обумовлено тим, що принцип взяття відліку ЦН по штрих–кодової рейці відрізняється від принципу відліку по метричних рейках оптичними нівелірами.
З численного обладнання компанії Sokkia слід зазначити високоточний цифровий нівелір з автофокусом SDL30 для нівелювання I класу [3].
2. Цілі і завдання досліджень.
Метою досліджень є розробка та удосконалення методики
високоточного нівелювання, що виконується системою
ціфровий нівелір – штрих–кодова рейка
, з урахуванням
впливу вертикальної рефракціі приземного шару атмосфери
на її роботу.
Основні завдання:
виконати аналіз існуючих програм спостереження при виконанні високоточного нівелювання;
виконати дослідження впливу вертикальність рейки при взятті звіту, на точність вимірювань;
розробити і дослідити програми спостережень на станції при нівелюванні I, II класів із застосуванням ЦН;
провести апробацію запропонованих методик для високоточного нівелювання із застосуванням ЦН;
виконати аналіз впливу вертикальної рефракції приземного шару атмосфери на результати нівелювання ЦН;
виконати дослідження впливу вертикальної рефракції приземного шару атмосфери на результати високоточного нівелювання ЦН;
удосконалити методику високоточного нівелювання, виконаного ЦН, з урахуванням впливу вертикальної рефракції приземного шару атмосфери на результати вимірювань;
виконати дослідження впливу різної освітленості штрих–кодових рейок на результати нівелювання ЦН;
виконати дослідження впливу зміни ємності акумуляторних батарей ЦН на величину зміни відліку по штрих–кодової рейці.
Об'єктом досліджень є вимірювальна нівелірна
система цифровий нівелір – штрих–кодова рейка
.
Предметом досліджень є методика виконання високоточного нівелювання ЦН з урахуванням впливу вертикальної рефракції приземного шару атмосфери.
Наукова новизна полягає в наступному:
виконані дослідження характеру і величини впливу вертикальної рефракції приземного шару атмосфери на вимірювані перевищення ЦН;
на основі результатів досліджень удосконалено методику ви–конання високоточного нівелювання ЦН з урахуванням впливу вертикальної рефракціі приземного шару атмосфери;
розроблена методика нівелювання I, II класів із застосуванням цифрових нівелірів.
Методи досліджень. Теоретичною базою для проведення досліджень є модель приземного шару атмосфери, в якому поширюється візірний промінь ЦН, методи кореляційного, дисперсійного та регресійного аналізу, елементи математичної статистики, теорії помилок вимірів і методи математичного моделювання результатів практичних вимірювань.
3. Конструкція і принцип відліку цифрових нівелірів
На мал. 3.1 представлена схема нівеліра NA 2002. За допомогою ПЗС–приймача відбувається зчитування коду шкали нівелірної рейки. Оптичні елементи цифрових нівелірів в основному запозичені у звичайних нівелірів, тому можливе візуальне відчитування по рейці. При вимірах в автоматичному режимі зображення штрихів кодової шкали рейки через светоделітельний блок проектуються на чутливу майданчик ПЗС–приймача [4].
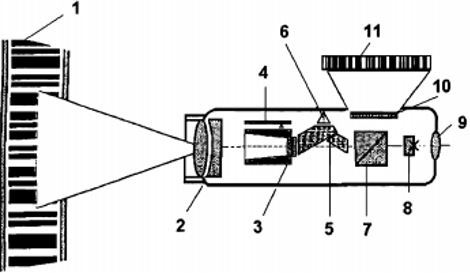
(1 – штрих–кодова нівелірна рейка; 2 – об'єктив; 3 – фокусує компонент; 4 – датчик положення фокусирующего компонента; 5 – блок компенсатора; 6 – блок контролю положення компенсатора; 7 – светоделітельний блок; 8 – сітка ниток; 9 – окуляр; 10 – ПЗС–приймач; 11 – зображення коду нівелірної рейки.)
Светоделітельний блок розділяє падаюче випромінювання в спектральної області на інфрачервоне і видиме. У той час як випромінювання, що лежить в інфрачервоній області спектра, відбивається від светоделітельной межі в бік приймача, видима частина безперешкодно пропускається светоделітельним блоком і формує зображення рейки в площині сітки ниток. Завдяки цьому, з одного боку, спостерігач не відчуває втрати потужності світла, а з іншого боку, на чутливу майданчик ПЗС–приймача, що має велику чутливість в інфрачервоній області спектра, потрапляє випромінювання достатньої інтенсивності. ПЗС–приймач складається з 256 фоточутливих елементів (пікселів), відстань між якими дорівнює 25 мкм. Оптична система нівеліра має кут поля зору рівний 2 °, так що при мінімальній відстані візування, рівному 1,8, на чутливу майданчик ПЗС–приймача проектується ділянку рейки довжиною 61 мм, а при відстані 100 м – 3,5 м.
При перефокусування зорової труби в діапазоні від 1,8 м до 100 м фокусує компонент переміщається на. Знаючи положення фокусирующего компонента, можна приблизно обчислити відстань до рейки.
Відстань до рейки і положення фокусирующего компонента пов'язані. Положення фокусирующего компонента реєструється електронним датчиком положення. Під час вимірювань електронною системою відстежується нахил приладу, або точніше, відхилення чутливого елемента компенсатора. ПЗС–приймач перетворює зображення штрихів коду в аналоговий відеосигнал, відеосигнал посилюється і перетворюється в цифровий. У мікропроцесор з 256 пікселів ПЗС–приймача надходить дискретний сигнал, який має 256 градацій яскравості.
Функціонування цифрового нівеліра базується на принципі кореляції. При цьому штриховий код, записаний в пам'ять приладу, порівнюється з формується за допомогою ПЗС–приймача сигналом (мал. 3.2). При застосуванні кореляції в цифрових нівелірах оптимізуються два параметра, а саме, висота і масштаб.
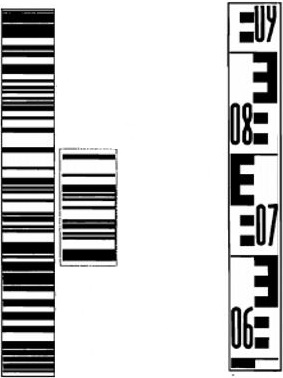
прилад–рейкапредставляється як зміщення штрихів коду рейки, з іншого боку змінюється масштаб зображення штрихів коду як функція відстані
прилад–рейка[5].
4. Рейки цифрових нівелірів
Цифрові нівеліри розрізняються принципами від зчитування по рейці, а рейки – штрих–кодами, використовуваними для цієї мети. Тому, працюючи з нівеліром фірми Leica Geosystem AG, необхідно застосовувати рейки, призначені для нівелірів тільки цієї фірми, працюючи з нівеліром фірми TOPCON – рейки фірми TOPCON і т. Д. Від якості матеріалу рейок, що використовуються при вимірах, залежить середня квадратична похибка вимірювань перевищень нівеліром на 1 км подвійного ходу. Фірми–виробники прагнуть досягти не тільки високої точності вимірювань, але також зробити рейки легкими і міцними. Сьогодні з'явився новий матеріал – скловолокно (фіберглас), який має чудове співвідношення міцності та ваги і малий коефіцієнт лінійного розширення –10ррт (мм / км).
Зазвичай на одному боці рейки наноситься бінарний код для автоматизованого отсчітиванія, а на іншій – звичайна шкала для візуального відліку [6].
5. Вимоги до високоточного нівелювання
Геодинамічні полігони поділяються на:
локальні полігони, приурочені до активних глибинних розломів і розривів земної кори;
майданні, що охоплюють райони можливих епіцентрів руйнівних землетрусів, райони великих населених пунктів і райони експлуатованих і споруджуваних гідростанцій;
регіональні, що зв'язують великі геологічні структури.
Таблиця 5.1 необхідна точність
|
клас нівелювання |
Середня квадратична помилка |
Допустима нев'язка в полігонах і по лініях, мм |
|
|
Випадкова, мм/км |
систематична, мм/км |
||
|
I |
0.8 |
0.08 |
3мм√L |
|
II |
2.0 |
0.20 |
5мм√L |
|
III |
5.0 |
– |
10мм√L |
|
IV |
10.0 |
– |
20мм√L |
На локальних і майданних полігонах висотні мережі створюють у вигляді пересічних ліній нівелювання I і II класів.
Висотні мережі на локальних і майданних побудовах прив'язують до головної висотної основі Росії для отримання висот в єдиній системі. Мережу нівелювання в цьому випадку розглядають як вільну з опорою на один репер державної нівелірної мережі.
Висотні мережі регіональних побудов входять в мережу державного нівелювання I і II класів.
Вимоги до методики нівелювання, нівелірам і рейок, порядок виконання відліків на станції ті ж, що при виробництві державного нівелювання відповідного класу.
При закріпленні ліній на геодинамічних полігонах віддають перевагу скельним і стінним реперам.
Всі старі репери і непрацюючі свердловини, що знаходяться на відстані 0,5 км від траси лінії нівелювання I класу і на відстані до 1 км від траси лінії II класу, обов'язково прив'язують до них відповідно нівелюванням I або II класів.
До непрацюючої свердловині приварюють марку, яка служить віковим репером. Якщо на полігоні немає таких свердловин, то закладають вікової репер. На майданчику на відстані 30 – 70 м від вікового репера закладають всі типи ґрунтових центрів і реперів, які застосовуються на даному полігоні. Два рази на рік (взимку і влітку) нівелюють всі репери на майданчику і зіставляють отримані перевищення. Типи реперів, явно нестійкі, виключають з подальшого нівелювання.
Нівелювання I і II класів на геодинамічних і техногенних полігонах – частина комплексу наукових геофізичних досліджень, що служить для отримання кількісних характеристик деформацій земної поверхні. Тому вимірювання виконують декількома послідовними циклами. Інтервал часу між повторним нівелюванням встановлюють виходячи з очікуваних швидкостей сучасних вертикальних рухів земної кори.
При проектуванні нівелірних мереж на техногенних полігонах відстань між кордоном родовища і реперами, вважає нерухомими, слід приймати рівним 8–кратною глибині нижнього експлуатованого горизонту, але у всіх випадках не менше 6 км. Проектовані лінії прокладають у вигляді мереж або окремих ліній. Не менш ніж від чотирьох пунктів (реперів) периметра нівелірного полігону, що збігається з контуром родовища, прокладають ходи до реперів, які вважають нерухомими [7].
6. Процес виконання вимірювань
Що б почати вимірювання нівелювання з середини,
нівелір встановлюють посередині між точками Т1
і Т2, наводимо його в робоче положення, вибираємо
в пристрої відповідну програму. Встановлюємо рейки
на точки Т1 і Т2, тримаючи їх строго за рівнем.
Спостерігач виконує наведення зорової труби на
рейку і фокусування. Після натискання кнопки
пуск
на корпусі нівеліра процес вимірювання
протікає в автоматичному режимі. Автоматично
зчитуються показання з датчика положення
фокусирующего компонента, визначається положення
чутливого елемента компенсатора, в залежності
від інтенсивності сигналу визначається час
інтегрування для досягнення необхідного рівня
насичення окремого пікселя ПЗЗ–приймача,
виконуються груба і точна оптимізації [8].
7. Висновки
По закінченню написання магістерської дисертації повинні отримати наступні результати:
методику виконання високоточного нівелювання із застосуванням нових засобів – цифрових нівелірів;
програми спостережень на станції при нівелюванні I і II класів;
методику виконання дослідження і результати впливу вертикальної рефракції приземного шару атмосфери на ЦН;
вдосконалену методику виконання нівелювання I і II класів з урахуванням особливостей впливу вертикальної рефракції приземного шару атмосфери на результати вимірів перевищень ЦН;
результати досліджень впливу різної освітленості штрих–кодових рейок на результати вимірювання перевищень на станції ЦН і способи ослаблення цього впливу;
результати досліджень впливу зменшення ємності акумуляторних батарей ЦН на величину зміни відліку по штрих–кодової рейці.
результати впливу вертикальність рейки при взятті звіту, на точність вимірювань;
Список джерел
- Н. М. Рябова. Исследование и совершенствование методики нивелирования I и II классов с применением цифровых нивелиров. – Новосибирск, 2013.– 176 с.
- Г.В. Колесников, М.В. Киселев некоторые аспекты измерения превышений методом анализа штрих–кода//Геопрофи.– 2008.– № 1.
- В.В. Грошев и М.С. Романчиков. INTERGEO 2008 тенденции и перспективы дальнейшего развития технологий // Геопрофи.– 2008.– №5
- О.В.Евстафьев. Нивелиры – от оптических до электронных// Геопрофи.– 2003.– № 1
- Карсунская М.М. – Геодезические природных ресурсов, 2002. – 186с.
- Соболева, Е. Л. Совершенствование технологии нивелирования II класса с использованием цифровых нивелиров / Е.Л. Соболева // Современные проблемы геодезии и оптики: сб. науч. ст. / СГГА. — Новосибирск, 2006.
- Инструкция по нивелированию I II III IV классов. ГКИНП(ГИТА) –03–010–03.2004.– М.: ЦНИИГАиК,2004.– 226 с.
- Уставич, Г. А. Технология выполнения высокоточного нивелирования цифровыми нивелирами / Г. А. Уставич // Геодезия и картография.– 2006.– № 2.