
Abstract
Contents
- Introduction
- 1. Modal control
- 2. Butterworth Filter
- 3. Research of positioning system in Matlab environment
- Conclusion:
- References
Introduction
Now, modal control is a promising method for the synthesis of control devices used in automation systems. Modal control provides the developer wide opportunities while securing the required indicators of the quality of processes flow: elimination of oscillation, speed boosting. At the last time analysis and synthesis of modal electric drive control systems become more and more relevant and much attention is paid to this [5].
1. Modal control
The idea of modal control is to organize feedbacks on all coordinates of the system, so that the characteristic polynomial has the desired properties, such as transition time and overshoot. A modal adjustment system, also, can provide apredetermined stiffness of the mechanical characteristic.
Figure 1 – The principle of modal regulation
Animation: 5 frames, unlimited number of repetitions (size 28.2 KB)
2. Butterworth Filter
An important step in the synthesis of the regulator is the correct choice of the desired transfer function, namely its type and order. They can be determined from the specified quality requirements of the regulated process.
The desired transfer function is given to the form
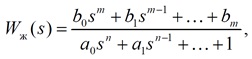
When choosing a characteristic polynomial, transfer functions (PFs) with the same poles, which are written on the basis of Newton polynomials, as well as PFs with Butterworth polynomials, were considered. Often, a Butterworth filter is taken as desired. All these functions do not have zeros, and their numerators are constants. Due to this, it is possible to ensure the ease of implementation of the synthesized regulator.
Butterworth polynomials are written in the form of ratios with real coefficients and are normalized by the cutoff frequency. To select the desired transfer function, characteristic polynomials of the second and third orders were considered. The cut-off frequency was selected by the LAFC of the system under study and ranged from 100 to 300 rad / s [4]. The requirements for the distribution of poles for the second and third orders coincide with the distribution of the poles, which are obtained by optimizing the systems of the subordinate regulation of the second and third orders. The larger the geometric mean root, the faster the filter will be, and, consequently, the system we design.
Studies show that it is the system that is suitable for this task using a filter of the second or the third order. The filter order is taken equal to the degree of the characteristic polynomial of the unchanged part of the system under study (n = 2), and the transfer function calculated at a cut-off frequency of 250 rad / s is chosen as the desired one. You can also use when building regulators transfer functions built on Newton's polynomials with.
According to the above method, several regulators were synthesized for the selected transfer functions, which are based on the Butterworth polynomials and Newton polynomials. The operation of the obtained regulators was tested on a simulation model of the positioning system in the Matlab environment [4].
3. Research of positioning system in Matlab environment
The Matlab environment allows, using transfer functions and visual blocks of elements, software and hardware to implement a block diagram of an electromechanical positioning system (SP).
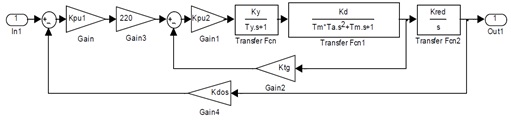
Figure 2 – The block diagram of the dual-circuit electromechanical positioning system
The peculiarity of the joint venture is that its various transient characteristics work at different angles of work with the same regulation time. This can be seen in Figure 3.
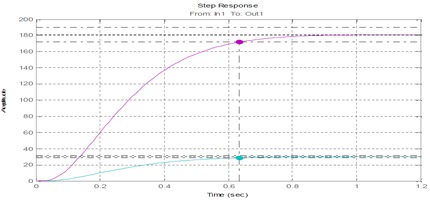
Figure 3 – Transient response of the SS when working out different angles of the task
To reduce the time of regulation of the joint venture, it is necessary to use a modal regulator (MP).
In Matlab, the synthesis of specified control quality indicators using MR requires a vector-matrix equation or an SP state equation.
When designing a joint venture with an MR, the first feature is the change in the amplitude of all the components of the state vector. This means that as the speed increases, the amplitudes of the components of the state vector exceed the permissible values of values such as speed, current, and motor voltage.
Conclusions on the results of comparing MP with classical regulators:
- regulation time and overshoot in the joint venture with the MR does not change;
- transient response in the joint venture with MR remains aperiodic 2nd order;
- transient response in the joint venture with KU becomes oscillatory;
- increase of speed in the joint venture with a control unit is limited by the dependence of the regulation time on the overshoot.
Thus, studies of the joint venture with MR proved the advantage of MR over classical design methods [2].
Conclusion
Studies have shown that for the synthesis of the controller according to the method of the desired transfer function, it is advisable to choose the second-order Newton characteristic polynomials as the characteristic polynomial.
From the results of the conducted research, it can be concluded that the use of a modal regulator ensures the highest performance of the positioning system and the specified control quality indicators. Unlike classical regulators, the modal regulator does not introduce additional inertia in the positioning system.
When writing this essay master's work is not yet completed. Final Completion: June 2019. The full text of the work and materials on the topic can be obtained from the author or his manager after the specified date.
Список источников
- Модальное управление [Электронный ресурс]. – Режим доступа: studopedia.ru свободный.
- Анучин А. С. Системы управления электроприводов: учебник для вузов – М.: Издательский дом МЭИ, 2015. – 290 с.
- Харченко А. П., Слепокуров Ю. С., Аверьянов П. А. Исследование следящей системы в среде MATLAB // Вестник Воронежского государственного технического университета. – Воронеж:
ВГТУ
, 2017, №4 (том 13). – С. 7-11. - Рулевский В. М., Букреев В. Г., Шандарова Е. Б. Синтез субоптимального регулятора напряжения в системе электропитания глубоководного аппарата // Электротехнические системы и комплексы 2018. №3(40). – С. 47-54.
- Кочнева Т. Н., Кожевников А. В., Кочнев Н. В. Синтез модального регулятора и оценка эффективности модального управления для двухмассовых электромеханических систем // Вестник Череповецкого государственного университета 2013. №4 (Т.2). – С. 15-22.
- Фильтр Баттерворта [Электронный ресурс]. – Режим доступа: wikipedia.org свободный.
- Модальное управление [Электронный ресурс]. – Режим доступа: studfiles.net свободный.