
Зміст
- Вступ
- 1. Модальне керування
- 2. Фільтр Баттерворта
- 3. Дослідження системи позиціонування в середовищі Matlab
- Висновки
- Список джерел
Вступ
В останні роки в промисловості набирають стрімкий розвиток системи позиційного електроприводу.
В наслідок чого, своє місце в електроприводі знайшов саморегулівний синхронний двигун, також відомий як сервопривід
.
У більшості випадків, він являє собою малоінерційний саморегулівний двигун з постійними магнітами.
У порівнянні з кроковим двигуном при тих же розмірах і умовах, серводвигун має більш високий крутний момент і більш високу ефективність.
У системах позиціонування завдання швидкості визначається за допомогою різниці між поточним становищем і помилкою позиціонування. Одним з найбільш ефективних методів надати системі позиціонування інваріантні властивості і забезпечити максимальне швидкодія і точність в динамічних режимах – включити до її складу модальний регулятор..
Модальне керування на даний момент є одним з найбільш перспективних методів синтезу керуючих пристроїв, що використовуються в системах автоматизації. Воно надає розробнику широкі можливості при забезпеченні необхідних показників якості протікання процесів: усунення колевальності при наявності пружності і люфтів в кінематичних зв'язках, підвищення швидкодії. У зв'язку з цим питання аналізу і синтезу систем модального керування електроприводами останнім часом, стають все більш актуальними і їм приділяється велика увага [5].
1. Модальне керування
Ідея модального керування полягає в організації зворотних зв'язків по всіх координатах системи, таким чином, щоб характеристичний поліном мав бажані властивості, такі як час перехідного процесу і перерегулювання. Також система модального регулювання може забезпечувати задану жорсткість механічної характеристики.
Малюнок 1 – Принцип модального регулювання
Анімація: 5 кадрів, необмежена кількість повторень (розмір 28.2 кБ)
У систему потрібно ввести новий вектор вхідних сигналів U – вектор керуючих впливів, зв'язок якого зі старим вхідним вектором R забезпечується рівнянням U = R-KocX. В такому випадку наша система диференціальних рівнянь, яка описує динаміку нашої системи прийме наступний вигляд:
Як відомо, динаміку перехідних процесів визначають коріння характеристичного полінома таким чином, визначаючи бажаний характер перехідного процесу заданого полінома, можливо досягти необхідних для нас показників якості.

де Dж(p) – бажаний характеристичний поліном, визначений виходячи із заданих показників якості регулювання за методикою непрямої кореневої оцінки.
Таким чином далі, вирішуючи цю систему рівнянь щодо невідомих нам коефіцієнтів Koc можна визначити необхідні для нас коефіцієнти негативного зворотного зв'язку по вектору стану Х, які і будуть представляти із себе модальний регулятор. Але не можна розраховувати на те що ми можемо таким чином реалізувати будь-який перехідний процес для будь-якої системи просто підставивши в якості бажаних будь коріння, так як в процесі створення регулятора передбачається що система лінійна, що насправді не так, і таким чином ми можемо синтезувати регулятор тільки для цієї лінійної частини системи [1].
2. Фільтр Баттерворта
Найбільш важливим етапом синтезу регулятора є коректний вибір бажаної передавальної функції, а саме її вид і порядок, який можна визначити з заданих вимог до якості регульованого процесу.
Стандартні нормовані передавальні функції зазвичай мають вигляд
Бажана передавальна функція приводиться до вигляду
її коефіцієнти при цьому пов'язані з коефіцієнтами нормованої передавальної функції наступними формулами (3):

Коефіцієнт α=tp/τp тому необхідний час регулювання буде забезпечено при обчисленні коефіцієнтів за формулами (3).
При виборі характеристичного полінома розглядалися передавальні функції (ПФ) з однаковими полюсами, які записані на підставі полиномів Ньютона, а також ПФ з поліномами Баттерворта. Найбільш часто в якості бажаного приймають фільтр Баттерворта. Ці всі функції не мають нулів, а їх чисельники є константами, за рахунок чого можна забезпечити простоту реалізації синтезованого регулятора.
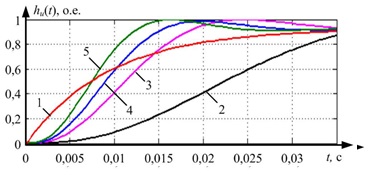
Передавальні функції з однаковими полюсами мають монотонними перехідними характеристиками. Якщо зменшити час регулювання, це викличе збільшення перерегулювания в системі. Як приклад на малюнку 2 представлені перехідні характеристики для ПФ з однаковими полюсами для полінома другого порядку. При підвищенні порядку характеристичного полінома затягується тривалість перехідного процесу. Для подальшого дослідження обрані характеристичні поліноми другого порядку з часом регулювання 0.02 і 0.025 с.
Малюнок 2 – Перехідні характеристики для ПФ з однаковими полюсами (крива 1 - характеристика досліджуваної системи; крива 2 - при tp=0.015 с; 3 – tp=0.02 с; 4 – tp=0.025 с)
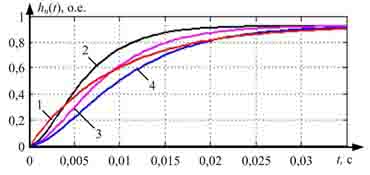
Поліноми Баттерворта зазвичай записуються у вигляді співвідношень з речовими коефіцієнтами і нормуються по частоті зрізу ωc=1. Для вибору бажаної передавальної функції розглядалися характеристичні поліноми другого і третього порядків. Частота зрізу вибиралася по ЛАЧХ досліджуваної системи і варіювалася від 100 до 300 рад / с [4]. Вимоги до розподілу полюсів для другого і третього порядків збігаються з розподілом полюсів, які виходять при оптимізації систем підпорядкованого регулювання другого і третього порядків. Чим більше середньогеометричні корінь, тим більше швидкодіючим буде фільтр, а, отже, і система, яку ми проектуємо. Для другого порядку перерегулювання становитиме G = 4,3%, для третього G = 7,6%. Провівши аналіз перехідних характеристик, які представлені на малюнку 3, можемо бачити, що з ростом частоти зрізу зменшується час перехідного процесу, але разом з тим зростає величина перерегулювання і коливання.
Малюнок 3 – . Перехідні характеристики для фільтра Баттерворта третього порядку (крива 1 – характеристика досліджуваної системи; крива 2 – при ωc=100; 3 – ωc=200; 4 – ωc=250; 5 – ωc=300)
На малюнку 4 зображено графіки перехідних характеристик при частоті зрізу, рівною 250 рад / с для фільтрів другого (n = 2) і третього (n = 3) порядку. З представлених графіків можна побачити, що збільшення порядку фільтра збільшує перерегулювання і підвищує коливальність системи. Також це призводить до збільшення тривалості перехідного процесу.
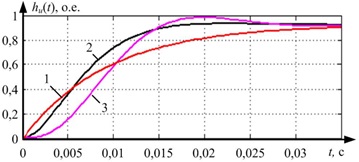
Малюнок 4 – Перехідні характеристики для фільтра Баттерворта при ωc=250 (крива 1 – характеристика досліджуваної системи; крива 2 – n=2; 3 – n=3)
Проведені дослідження показують, що для даного завдання підходить саме система із застосуванням фільтра другого або третього порядку. Порядок фільтра приймаємо рівним ступеня характеристичного полінома незмінної частини досліджуваної системи (n = 2), а передавальна функція, розрахована при частоті зрізу, рівною 250 рад / с, обрана в якості бажаної. Також можна використовувати при побудові регуляторів передавальні функції, побудовані на поліноми Ньютона при tp=0.02 и 0.025 с.
За вищевикладеної методикою для обраних передавальних функцій синтезовано кілька регуляторів, в основі яких лежать поліноми Баттерворта і поліноми Ньютона. Робота отриманих регуляторів перевірялася на імітаційної моделі системи позиціонування в середовищі Matlab [4].
3. Дослідження системи позиціонування в середовищі Matlab
Середа Matlab дозволяє, використовуючи передавальні функції і візуальні блоки елементів, програмно і апаратно реалізувати структурну схему електромеханічної системи позиціонування.
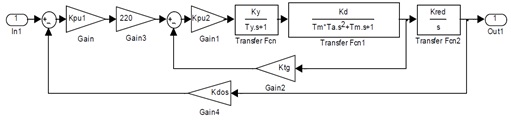
Малюнок 5 – Структурна схема двоконтурної електромеханічної системи позиціонування
Структурна схема двоконтурної електромеханічної системи управління складається з системи автоматичного регулювання швидкості (САР) і системи позиціонування (СП) – мал.5.
СП попередньо налаштовується за умовами експлуатації з П-регулятором. САР швидкості передбачає, що при подачі на вхід системи Uн = 220 В двигун розганяється до номінальної швидкості nном. Змінюється Кпу2. З умов роботи перехідна характеристика СП може бути апериодичною 2-го порядку. Змінюється Кпу1.
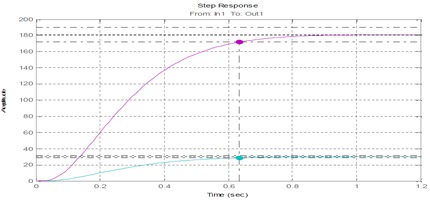
На малюнку 6 показані перехідні характеристики системи позиціонування при зміні Кпу1.
Малюнок 6 – Перехідні характеристики СП при зміні Кпу1
Перехідна характеристика СП з перерегулюванням не більше 0,05% при заданому допустимому відхиленні Δ = ± 0.05 * hуст має найменший час регулювання.
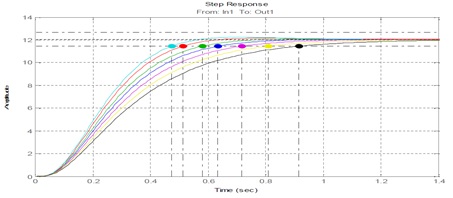
Особливістю СП є те, що різні кути завдання її перехідна характеристика відпрацьовує з одним і тим же часом регулювання. Це можемо бачити на малюнку 7.
Малюнок 7 – Перехідна характеристика СП при відпрацюванні різних кутів завдання
Зберегти форму перехідної характеристики СП і зменшити час регулювання при використанні П-регулятора не можливо, так як існує залежність часу регулювання і перерегулювання від значення коефіцієнта регулятора КПУ1. Для зменшення часу регулювання СП необхідно використовувати модальний регулятор (МР).
У середовищі Matlab синтез заданих показників якості регулювання з використанням МР вимагає векторно-матричного рівняння або рівняння простору станів СП.
При завданні структурних схем в області Simulink однією з особливостей дослідження систем автоматичного управління є те, що в робочій області Matlab при дослідженні системи матриці A, B, C і D не відповідають матрицями вихідної системи.
Матриця рядок коефіцієнтів МР СП записується: К = [К1 К2 К3 К4]. Рівняння СП з МР представляється

де V – скалярний вхід, як сума вхідного сигналу і вихідного сигналу МР. У той час як динамічні властивості вихідної СП визначаються матрицею А1, динамічні властивості СП з МР визначаються матрицею А = А1 - В1 * К.
При проектуванні СП з МР першої особливістю є зміна амплітуди всіх складових вектора станів. Це означає, що при підвищенні швидкодії амплітуди складових вектора станів перевищують допустимі значення таких величин, як швидкість, струм і напруга двигуна.
Чутливість перехідної характеристики до зміни коефіцієнтів К1, К2, К3 і К4 є другою особливістю використання МР.
Оцінимо зміна коефіцієнтів К1, К2, К3 (коефіцієнт К4 не впливає) на відносну зміну перерегулирования σ/σо і відносна зміна часу регулювання tпу1/tpo.
При цьому tpo = 0.182 с. – час регулювання перехідного процесу в початковій структурній схемі СП з МР, а tp – час регулювання перехідного процесу в структурній схемі СП зі зміненими значеннями параметрів МР. Перерегулювання перехідного процесу в початковій структурній схемі з МР – σo = 0.05%, а σ – перегулювання перехідного процесу в структурній схемі з доступом до змінним станів зі зміненими значеннями параметрів МР.
З наведених вище результатів досліджень можна зробити наступні висновки:
- Вплив довільної варіації параметрів МР на час регулювання в залежності від К1, К2 і К3 має різну функціональну залежність і ступінь впливу.
- Вплив довільної варіації параметрів МР на перерегулювання для коефіцієнтів К1, К3 має прямо пропорційну функціональну залежність, а для коефіцієнта К2 зворотнопропорційну функціональну залежність.
- Ддовільне зміна коефіцієнтів МР при збереженні форми перехідної характеристики неможливо.
На малюнку 8 зображена схема дослідження СП з МР і спостерігачем. Спостерігач відновлює відсутні для реалізації зворотних зв'язків (ОС) змінні Х3 і Х4.
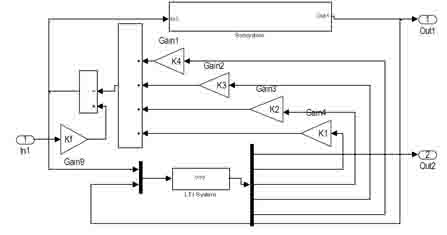
Малюнок 8 – Схема дослідження СП з МР і спостерігачем
Коефіцієнт Kf введений для компенсації зміни амплітуди вхідного сигналу. Час регулювання перехідної характеристики вихідної СП tp = 0.582 с.
Застосування МР, при заданому перегуліровані σ = (0.04-0.05)%, відповідає підвищенню швидкодії в 3 рази.
Висновки за результатами порівняння МР з класичними регуляторами:
- Час регулювання і перерегулювання в СП з МР не змінюється.
- Перехідна характеристика в СП з МР залишається апериодною 2-го порядку.
- Час регулювання в СП з коригувальним пристроєм (КУ) змінюється не суттєво, а перерегулювання збільшується в десятки разів.
- Перехідна характеристика в СП з КУ стає коливальною.
- Підвищення швидкодії в СП з КУ обмежена залежністю часу регулювання від перерегулювання.
Таким чином, дослідження СП з МР довели перевагу МР перед традиційними методами проектування [2].
Висновки
Проведені дослідження показали, що для синтезу регулятора за методом бажаної передавальної функції в якості характеристичного полінома доцільно вибирати характеристичні поліноми Ньютона другого порядку з часом регулювання 0.02 і 0.025 с, а також поліном Баттерворта при частоті зрізу 250 рад / с.
З результатів проведених досліджень можна зробити висновок, що застосування модального регулятора забезпечує найбільшу швидкодії системи позиціонування і заданих показників якості управління. На відміну від класичних регуляторів, модальний регулятор не вносить додаткову інерційність в систему позиціонування.
У різних джерелах, де описується модальний регулятор, відзначаються деякі недоліки, які обмежують його практичне застосування. Пошук варіантів усунення цих недоліків і є мета представлених і наступних досліджень систем з модальним регулятором.
При написанні даного реферату магістерська робота ще не завершена. Остаточне завершення: червень 2019 року. Повний текст роботи та матеріали по темі можуть бути отримані у автора або його керівника після зазначеної дати.
Список джерел
- Модальное управление [Электронный ресурс]. – Режим доступа: studopedia.ru свободный.
- Анучин А. С. Системы управления электроприводов: учебник для вузов – М.: Издательский дом МЭИ, 2015. – 290 с.
- Харченко А. П., Слепокуров Ю. С., Аверьянов П. А. Исследование следящей системы в среде MATLAB // Вестник Воронежского государственного технического университета. – Воронеж:
ВГТУ
, 2017, №4 (том 13). – С. 7-11. - Рулевский В. М., Букреев В. Г., Шандарова Е. Б. Синтез субоптимального регулятора напряжения в системе электропитания глубоководного аппарата // Электротехнические системы и комплексы 2018. №3(40). – С. 47-54.
- Кочнева Т. Н., Кожевников А. В., Кочнев Н. В. Синтез модального регулятора и оценка эффективности модального управления для двухмассовых электромеханических систем // Вестник Череповецкого государственного университета 2013. №4 (Т.2). – С. 15-22.
- Фильтр Баттерворта [Электронный ресурс]. – Режим доступа: wikipedia.org свободный.
- Модальное управление [Электронный ресурс]. – Режим доступа: studfiles.net свободный.