
Abstract
Content
- Introduction
- 1. Relevance of the topic and purpose of the study
- 2. Mobile robots classificatio
- 3. Types of control of the mobile robot ADS
Morrigan–S
- 4. Equipment mobile robot ADS
Morrigan–S
- 5. Microcontroller selection
- 6. Project Benefits
- List of sources
Introduction
Robots – automatic systems designed to reproduce the motor and intellectual functions of a person. They differ from traditional in their greater versatility and ability to adapt to various tasks, including in a changing environment.
Robots today have many uses. One of the most dangerous – bomb disposal. For almost half a century, robots & ndash; sappers save human lives. They were used to deactivate explosive devices in hundreds, if not thousands, of cases.
Robot – automatic detection system (ADS) – this device replaces a person in combat situations, it is designed to save human life or to work in conditions incompatible with human capabilities, for example: reconnaissance, demining, and the like.
Most robots are telepresence devices, that is, devices with human control and a control panel, be it a special remote control, be it a smartphone from which you can control the robot, but there are robots that can also work independently, with a specially set task.[1]
1. Relevance of the topic and purpose of the study
Robotics – applied science, engaged in the development of automated technical systems and is the most important technical basis for the intensification of production.
Robots today have many uses. One of the most dangerous – neutralization of suspicious devices. For almost half a century, robots have saved human lives. They were used to deactivate devices in hundreds, if not thousands, of cases.
However, to say the robot ADS
is not quite right. The Oxford dictionary contains: Robot – a mechanism that can automatically perform complex sequences of actions
. ADS robots do not make decisions and do not work autonomously. It is better to call them drones, since they are remotely controlled by a specialized person who has undergone certain training.
Nowadays, robots in many areas are changing people. Similarly, in this dangerous sphere, it was not without the use of specialized robots, which allow replacing a person, thereby saving his life from adverse consequences.[2]
ADS Morrigan–S
is intended for the detection, recognition and transmission of information on suspicious metal objects that may harm a person, determine stretch marks and other explosive devices, and conduct mine reconnaissance.
The goal of the master's work is to develop a system for the automatic detection of the ADS Morrigan–S
.
2. Mobile robots classificatio
Research robots – these are devices for conducting various studies, including the possibilities of using robots to perform various functions. These include numerous devices, both automatic and semi-automatic plan. On Wednesdays of use they are distinguished:
- Space – used for research in space conditions, they include various research satellites.
- Ground – designed to conduct research on the surface of the earth, in the case of research on other planets, robots are called planet rovers.
- Underground – able to conduct research under the surface of the soil, either directly under the ground or in caves and grottoes.
- Marine – devices for research in the surface or underwater position.
- Battle Robot – it is a multifunctional technical device with anthropomorphic (human-like) behavior, partially or fully performing human functions in solving certain combat missions. Allows you to replace a person in the performance of combat missions, save his life, as well as perform tasks that are incompatible with his capabilities.
3. Types of control of the CAO mobile robot ADS Morrigan–S
The control of the robot is done in 2 ways. With android – smartphone and Bluetooth signal transmission, as well as automatic control carried out with the help of the ultrasonic sensor HCSR–04;
The first type of robot control is carried out via the Bluethooth channel using a telephone and a program ArduinoJoystickController.
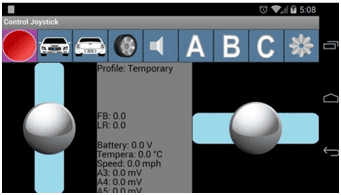
Figure 1 – Program ArduinoJoystickController
Control from a smartphone via Bluetooth. Bluetooth – this is probably the most common type of communication for short distances, which is used by most modern electronic devices.
Telephone headsets, headphones, keyboards and mice, printers and others. Some time ago, bluetooth was distributed as a means of transferring files between phones. The main advantages of BT can be called a good resistance to wideband interference and ease of implementation. The first means that a bunch of devices in the same place can simultaneously communicate with each other without interfering with each other. The second helped the widespread adoption of Bluetooth in the DIY environment, and in general in all environments. The work uses BT HC–06 to control the robot from a smartphone.[7]
Figure 2 – Bluethooth HC–06
The second type of control is carried out using the ultrasonic sensor HC–SR04. Simple words are the implementation of the automatic avoidance of obstacles.
External ultrasonic sensor measuring distance HC–SR04 is presented in Figure 3.

Figure 3 – Ultrasonic sensor measuring distance HC–SR04
Ultrasonic sensor is designed to change the distance from the device to the barrier.
Pinout:
- VCC – sensor supply;
- GND – ground;
- Trig – digital input to enable measurement;
- Echo – after the measurement is completed, a logical unit will be fed to this output for a time proportional to the distance to the object.
The dimensions of the ultrasonic sensor measuring distance HC–SR04 are presented in Figure 4.
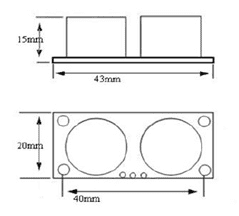
Figure 4 – Ultrasonic sensor dimensions
Principle of operation:
The sensor emits a short ultrasonic pulse (at time 0), which is reflected from the object and received by the sensor. The distance is calculated based on the time to echo and the speed of sound in the air.
The principle of operation and the diagram of operation of the ultrasonic sensor measuring distance HC–SR04 is presented in Figure 5.
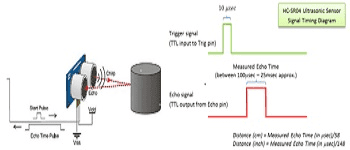
Figure 5 – The principle of operation of the ultrasonic sensor
Thus, the sensor receives an echo signal, and outputs a distance that is encoded by the duration of the electrical signal at the sensor output (Echo). The next pulse can be radiated only after the echo from the previous one disappears. This time is called the cycle period. The recommended period between pulses must be at least 50 ms. If a signal pulse (10 ?s) is applied to the signal pin (Trig), then the ultrasound module will emit eight packets of the ultrasound signal with a frequency of 40 kHz and detect their echo. The measured distance to the object is proportional to the width of the echo (Echo).
Documentation on the sensor also indicates that if no obstacles are detected, then the output will be a signal with a duration of 38ms.
The radiation pattern of the ultrasonic sensor measuring distance HC–SR04 is presented in Figure 6.[4]
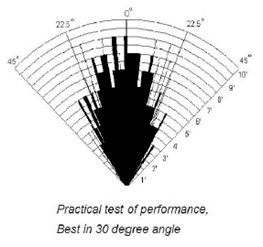
Figure 6 – Ultrasonic Sensor Pattern
4. Equipment mobile robot ADS Morrigan–S
- Debugging Board STM32F4DISCOVERY. It is intended for debugging and device control.
- Futaba S3001 – analog standard servo. Designed for turning the device.

Figure 7 – Servomotor Futaba S3001
The principle of operation of the servo:
When the pulse sent to the servo becomes shorter than 1.5 ms, the servo turns the output shaft a few degrees counterclockwise and holds this position. When the pulse is wider than 1.5 ms, then the opposite occurs. The minimum and maximum pulse width that drives a servo is a property of a particular servo. Different brands, and even different servo drives of the same brand, have different minimum and maximum. Typically, the minimum pulse width is approximately 1 ms and the maximum pulse width is 2 ms.[3]
Figure 8 shows the operating principle of the Futaba S3001 servo.
Figure 8 – Operating principle of the Futaba S3001 servo
(анимация: 11 frames, 47 kilobytes)The budget standard Futaba S3001 steering wheel with plastic gears of the gearbox and one bearing, which is used on various models of cars, helicopters, aircraft, boats and yachts of small and medium sizes. It is an excellent choice for models that require servo drives with increased service life. Inexpensive ball bearing servo for demanding users. Standard case size. The manufacturer recommends using the drive S 3001 in cases where durability is needed. Characterized as a first-class servo drive for general use for small and medium-sized models of helicopters.[5]
- Engines forward / backward
Morrigan–S
. Safe power, ease of installation and maintenance, provide undeniable advantages of using these engines in this project.To start the movement of a mobile robot
Morrigan–S
, from the Bluetooth HC module – 06 the control signal should come to the STM32F4DISCOVERY board, then the signal is transmitted from the board to the control driver based on the L298N driver.L298N Driver & ndash; this is a complete bridge driver for controlling bidirectional loads with currents up to 2 A and voltages up to 46 V. This model is designed to control components with inductive loads, such as electromagnets, relays, motors.
Figure 9 – L298N Driver
Next from the driver, the control signal goes to the engine that starts to rotate, which creates the movement of the robot in the right direction. Using the L298N driver, we can drive our engines in two directions, forward and backward.[6]
The subject of the development of the mobile robot ADS
Morrigan
was started back in undergraduate. A video review of the bachelor’s work is presented below.:
At the time of writing this essay the master's work is not yet completed. Estimated completion date of master's work: June 2019. The full text of the work and materials on the topic can be obtained from the author or his manager after the specified date. b>
References
- Устройство роботов.[Электронный ресурс] – Режим доступа: mechs.su..., доступ свободный.
- С. Г. Колпаков, А. Д. Мячиков. Классификация роботов по использованию, передвижению и компонентам // Молодой ученый. – 2017. – №3.[Электронный ресурс] – Режим доступа: moluch.ru..., доступ свободный.
- В. Ярополов Как работает сервопривод?[Электронный ресурс] – Режим доступа: www.rc-auto.ru..., доступ свободный.
- Ультразвуковой датчик измерения расстояния HC–SR04.[Электронный ресурс] – Режим доступа: robocraft.ru..., доступ свободный.
- STM32F4DISCOVERY.[Электронный ресурс] – Режим доступа:www.st.com..., доступ свободный.
- Отладочная плата STM32F4 Discovery.[Электронный ресурс] – Режим доступа: robotosha.ru... , доступ свободный.
- S3003 Futaba Servo.[Электронный ресурс] – Режим доступа: ww.es.co.th..., доступ свободный.
- L298N.[Электронный ресурс] – Режим доступа: www.alldatasheet.com..., доступ свободный.
- HC–06.[Электронный ресурс] – Режим доступа: www.olimex.com..., доступ свободный.