
Реферат за темою випускної роботи
Зміст
- Вступ
- 1. Актуальність теми і мета дослідження
- 2. Класифікація мобільних роботів
- 3. Типи управління мобільним роботом САВ
Морріган–С
- 4. Обладнення мобільного робота САВ
Морріган–С
- 5. Вибір мікроконтролера
- 6. Переваги проекту
- Перелік посиланнь
Вступ
Роботи – автоматичні системи, призначені для відтворення рухових та інтелектуальних функцій людини. Від традиційних відрізняються більшою універсальністю і здатністю адаптації на виконання різних завдань, в тому числі в мінливих обстановці.
Роботи сьогодні знаходять безліч застосувань. Одне з найнебезпечніших & ndash; знешкодження бомб. Уже майже півстоліття роботи – сапери рятують людські життя. Їх використовували для деактивації вибухових пристроїв в сотнях, якщо не тисячі, випадків.
Робот – система автоматичного виявлення (САВ) – це пристрій заміняє людини в бойових ситуаціях, він призначений для збереження людського життя або для роботи в умовах, несумісних з можливостями людини, наприклад: розвідка, розмінування тощо.
Більшість роботів є пристроями телеприсутності, тобто пристрої з управлінням людини і пульта управління, будь то спеціальний пульт, будь то смартфон з якого можна управляти роботом, але є роботи які так само можуть працювати автономно, зі спеціально встановленним завданням.[1]
1. Актуальність теми і мета дослідження
Робототехніка – прикладна наука, що займається розробкою автоматизованих технічних систем і є найважливішою технічною основою інтенсифікації виробництва.
Роботи сьогодні знаходять безліч застосувань. Одне з найнебезпечніших – знешкодження підозрілих пристроїв. Уже майже півстоліття роботи рятують людські життя. Їх використовували для деактивації пристроїв в сотнях, якщо не тисячі, випадків.
Втім, говорити робот САВ
не зовсім вірно. В Оксфордському словнику значиться: Робот – механізм, здатний автоматично виконувати складну послідовність дій
. Роботи САО не приймають рішень і не працюють автономно. Їх краще називати дронамі, так як ними дистанційно управляє спеціалізований людина минулий певну підготовку.
У наш час роботи в багатьох сферах за змінюють людину. Так само і в цій небезпечній сфері не обійшлося без використання спеціалізованих роботів, які дозволяють замінити людини, тим самим зберігаючи його життя від несприятливих наслідків.[2]
САВ Морріган–С
призначена для виявлення, розпізнавання і передачі та інформації про підозрілі металевих предметах, які можуть завдати шкоди людині, визначення розтяжок та інших вибухових пристроїв, проведення розвідки мінних полів.
Метою магістарской роботи є розробка системи автоматичного виявлення САВ Морріган–С
.
2. Класифікація мобільних роботів
Дослідницькі роботи – це пристрої для проведення різних досліджень, в тому числі і можливостей використання роботів для виконання різних функцій. До них відносяться численні прилади як автоматичного, так і напівавтоматичного плану. По середах використання:
- Космічні – використовуються для проведення досліджень в умовах космосу, до них можна віднести різні дослідницькі супутники.
- Наземні – призначені для проведення досліджень на поверхні землі, в разі проведення досліджень на інших планетах.
- Підземні – здатні проводити дослідження під поверхнею грунту, або безпосередньо під грунтом або ж в печерах і гротах.
- Морські – пристрою для проведення досліджень в надводному або підводному положенні.
- Бойовий робот – це багатофункціональний технічний пристрій з антропоморфних (людиноподібним) поведінкою, частково або повністю виконує функції людини при вирішенні певних бойових задач. Дозволяє замінити людини при виконанні бойових завдань, зберегти йому життя, а також виконати завдання, несумісні з його можливостями.
3. Типи управління мобільним роботом САВ Морріган–С
Управління роботом проводиться 2ма способами. За допомогою андроїд – смартфона і передачі сигналу по каналу Bluetooth, а також автоуправління здійснюване за допомогою ультразвукового датчика HCSR–04.
Перший тип управління роботом здійснюється посредствам каналу Bluethooth за допомогою телефону та програми ArduinoJoystickController.
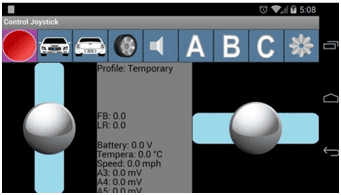
Рисунок 1 – Програма ArduinoJoystickController
Управління зі смартфона проводитися посредствам з'єднання Bluetooth. Bluetooth – це мабуть найпоширеніший тип зв'язку для коротких дистанцій, яким користуються більшість сучасних електронних пристроїв.
Телефонні гарнітури, навушники, клавіатури і мишки, принтери та інші. Деякий час назад bluetooth був поширений як засіб передачі файлів між телефонами. Головними перевагами BT можна назвати хорошу стійкість до широкосмугових перешкод і простоту реалізації. Перше означає, що купа пристроїв, що знаходяться в одному місці, можуть одночасно спілкуватися між собою, не заважаючи один одному. Друге ж допомогло широкому поширенню Bluetooth в середовищі DIY, і взагалі у всіх середовищах. В роботі використовується BT HC–06 для управління роботом з смартфона.[9]
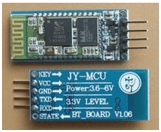
Рисунок 2 – Bluethooth HC–06
Другий тип управління здійснюється за допомогою ультразвукового датчика HC–SR04. Простими словами відбувається реалізація автоматичного об'їзду перешкод.
Зовнішній ультразвукового датчика вимірювання відстані HC–SR04 представлений на рисунку 3.

Рисунок 3 – Ультразвуковий датчик вимірювання відстані HC–SR04
Ультразвуковий датчик призначений для зміни відстані від пристрою до перешкоди.
Распіновка:
- VCC – живлення датчика;
- GND – земля;
- Trig – цифровий вхід для включення вимірювання;
- Echo – після завершення вимірювання, на цей вихід буде подана логічна одиниця на час, пропорційне відстані до об'єкта.
Розміри ультразвукового датчика вимірювання відстані HC–SR04 представлені на рисунку 4.
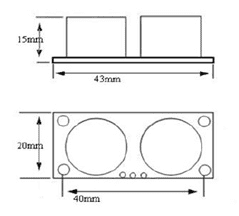
Рисунок 4 – Розміры ультразвукового датчика
Принцип работы:
Сенсор випромінює короткий ультразвуковий імпульс (в момент часу 0), який відбивається від об'єкта і приймається сенсором. Відстань розраховується виходячи з часу до отримання луни і швидкості звуку в повітрі.
Принцип роботи і діаграма роботи ультразвукового датчика вимірювання відстані HC–SR04 представлений на рисунку 5.
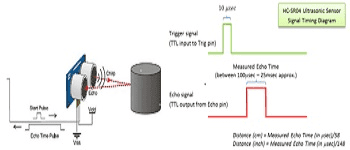
Рисунок 5 – Принцип роботи ультразвукового датчика
Таким чином, сенсор отримує сигнал луни, і видає відстань, яке кодується тривалістю електричного сигнал на виході датчика (Echo). Наступний імпульс може бути ізлучён, тільки після зникнення луни від попереднього. Це час називається періодом циклу (cycle period). Рекомендований період між імпульсами повинен бути не менше 50 мс. Якщо на сигнальний пін (Trig) подається імпульс тривалістю 10 мкс, то ультразвукової модуль буде випромінювати вісім пачок ультразвукового сигналу з частотою 40кГц і виявляти їх відлуння. Вимірювання відстаней до об'єкта пропорційно ширині луни (Echo).
Документація на сенсор, так само вказує, що якщо ніяких перешкод не виявлено, то на виході буде сигнал з тривалістю 38ms.
Діаграма спрямованості ультразвукового датчика вимірювання відстані HC–SR04 представлена ??на рисунку 6.[4]
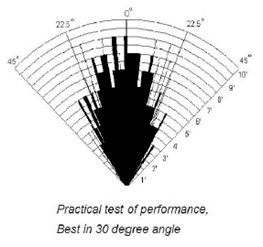
Рисунок 6 – Діаграма спрямованості ультразвукового датчика
4. Обладнення мобільного робота САВ Морріган–С
- Відладочна плата STM32F4DISCOVERY. Вона призначена для налагодження та управління пристроєм.
- Futaba S3001 – аналоговий стандартний сервопривід. Призначений для поворотної системи пристрою.

Рисунок 7 – Сервопривід Futaba S3001
Принцип дії сервоприводу:
Коли імпульс, що посилається на сервопривід, стає коротше 1,5 мс, сервопривід повертає вихідний вал на кілька градусів проти годинникової стрілки й утримує це положення. Коли імпульс ширше, ніж 1,5 мс, тоді відбувається протилежне. Мінімальна і максимальна ширина імпульсу, який управляє сервоприводом, є властивістю конкретного сервоприводу. Різні марки, і навіть різні сервоприводи однієї марки, володіють різним мінімумом і максимумом. Як правило, ширина мінімального імпульсу становить приблизно 1мс і ширина максимального імпульсу складає 2 мс.[3]
На рисунку 8 показаний принцип роботи сервоприводу Futaba S3001.
Рисунок 8 – Принцип дії сервоприводу Futaba S3001
(анимація: 11 кадрів, 47 кілобайт)Бюджетна стандартна кермова машинка Futaba S3001 з пластиковими шестернями редуктора і одним підшипником, яка застосовується на різних моделях автомобілів, вертольотів, літаків, човнів і яхт невеликого і середнього розмірів. Є чудовим вибором для моделей, де потрібні сервоприводи з підвищеним терміном служби. Недорогий сервопривід з підшипниками для вимогливих користувачів. Стандартний розмір корпусу. Виробник рекомендує використовувати привід S 3001 в тих випадках, коли потрібна довговічність. Характеризується як першокласний сервопривід широкого застосування для маленьких і середнього розміру моделей вертольотів.[7]
- Двигуни руху вперед / назад
Морриган–С
. Безпечне живлення, зручність установки і обслуговування, дають незаперечні переваги використання в даному проекті цих двигунів.Для початку руху мобільного робота
Морріган–С
, з модуля Bluetooth HC–06 повинен прийти керуючий сигнал на плату STM32F4DISCOVERY, далі з плати сигнал передається на драйвер управління в основі якого лежить драйвер L298N.Драйвер L298N – це повний бруківці драйвер для управління двонаправленими навантаженнями з струмами до 2 А і напругою до 46 В. Дана модель розроблена для управління компонентами з індуктивними навантаженнями, такими як електромагніти, реле, двигуни.
Рисунок 9 – Драйвер L298N
Далі з драйвера керуючий сигнал йде на які двигуна починають обертатися, чим створюють рух робота в потрібному напрямку. За допомогою драйвера L298N ми можемо керувати нашими двигунами за двома напрямками, вперед і назад.[8]
- Блок живлення.
- DC/DC перетворювач напруги. Харчування апаратури здійснюється від гальванічних елементів або акумуляторів, то перетворення напруги до потрібного рівня можливо лише за допомогою DC/DC перетворювачів. Ідея досить проста: постійна напруга перетворюється в змінну, як правило, з частотою кілька десятків і навіть сотень кілогерц, підвищується (знижується), а потім випрямляється і подається в навантаження. Такі перетворювачі часто називаються імпульсними.
Рисунок 10 – DC/DC перетворювач напруги
- Контролер заряду FDC – 2s–2 18650 Li–ion battery.

Рисунок 11 – Контролер заряду FDC – 2s–2 18650 Li–ion battery
Контролер заряду FDC – 2s–2 18650 Li–ion battery використовується для заряду Li–ion батарей САО
Морріган–С
.
Рисунок 12 – Схема підключення Li–ion батарей до контролера заряду FDC – 2s–2 18650 Li–ion battery
- Стабілізатор напруги L7805.
Мікросхема випускається в двох видах, в пластмасі – ТО – 220 і металі – ТО–3. Три піни: зліва на право – вхід, мінус, вихід. У проекті використовується для живлення всієї 5В боку.
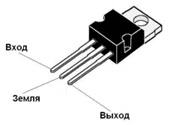
Рисунок 13 – Стабілізатор напруги L7805
Останніх дві цифри вказують на стабілізовану напругу мікросхеми – 7805, – 5 вольт відповідно. Ось схема підключення стабілізатора, яка підходить для всіх мікросхем цієї серії:
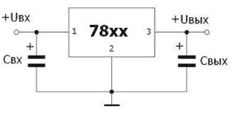
Рисунок 14 – Схема підключения стабілізатора напруги L7805
- Джерелом живлення виступають дві літієві батарейки 18650, 3.7 вольта, 1200 мА/ч.

Рисунок 15 – Литиевые батарейки 18650
3.7 вольта, 1200 мА/год Акумулятор 18650 – це літій–іонна батарея, яка за формою нагадує пальчиковую батарейку, але на виході має напругу 3.7 В, а її ємність становить від 1200 до 3600 мАг.
- DC/DC перетворювач напруги. Харчування апаратури здійснюється від гальванічних елементів або акумуляторів, то перетворення напруги до потрібного рівня можливо лише за допомогою DC/DC перетворювачів. Ідея досить проста: постійна напруга перетворюється в змінну, як правило, з частотою кілька десятків і навіть сотень кілогерц, підвищується (знижується), а потім випрямляється і подається в навантаження. Такі перетворювачі часто називаються імпульсними.
5. Вибір микроконтролера
Для створення повноцінного робота потрібна велика кількість компонентів і ми, справили спробу систематизації їх для подальшого використання. Мозком
практично кожного робота є мікроконтролер або ж їх сукупність, де кожен відповідає за певні функції. З одного боку, використання декількох мікроконтролерів ускладнює конструкцію, але з іншого дозволяє домогтися більшої надійності системи в цілому і тривалості її роботи завдяки можливості відключення деяких вузлів, а також керуючих ними контролерів в разі їх непотрібності в даний момент. Ключовими аспектами при виборі мікроконтролера є: розрядність, кількість цифрових і аналогових входів і виходів, розмір флеш-пам'яті, кількість оперативної пам'яті, тактова частота, наявність таймерів та інших периферійних пристроїв.
Відладочна плата STM32F4DISCOVERY.
Вона призначена для налагодження та управління пристроєм. STM32F4DISCOVERY – високопродуктивна дослідницька плата для STM32F4 дозволяє вивчати можливості мікроконтролера STM32F4 і легко розробляти власні програми. У комплект поставки входить все необхідне, щоб негайно починати розробки, як новачкам, так і досвідченим користувачам. Заснована на STM32F407VGT6, плата має інтегрований відладчик ST – LINK / V2, два ST MEMS, цифровий вимірювач прискорення (акселерометр) і цифровий мікрофон, один аудіо ЦАП з інтегрованим драйвером гучномовця, що працюють в класі D, світлодіоди і кнопки, а також роз'єм USB OTG micro – AB. В основі плати лежить мікроконтролер STM32F407VGT6 з ядром ARM Cortex – M4 і максимальною тактовою частотою 168 МГц, що дозволяє використовувати його в цифровій обробці сигналів і інших додатках, де необхідно максимальну швидкодію. Наявність 1 мегабайта флешпам'яті і 192 кбайт ОЗУ просто вражають. Присутній вся стандартна периферія, така як DAC, ADC, SPI, I2C, PWM, RTC. Також є підтримка USB хоста і Ethernet, є інтерфейс DCMI для підключення камери і SDIO для підключення SD карт, а також апаратний генератор випадкових чисел. Отладчик Тут все той же ST – Link, тільки з двоколірним світлодіодом, який красиво підморгує при налагодженні. Є 4 світлодіода, розташованих навколо акселерометра, і дві кнопки – призначена для користувача і RESET.[5]
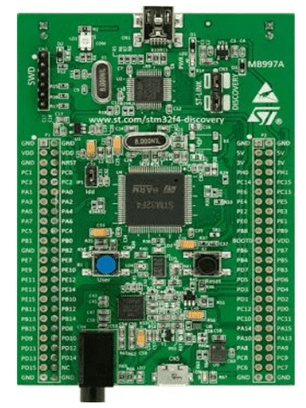
Рисунок 16 – Відладочна плата STM32F4DISCOVERY
Великим плюсом є наявність в мікроконтролері модуля для роботи з числами з плаваючою точкою, що збільшує швидкість обробки в додатках, пов'язаних, наприклад зі спектральним аналізом або ж в БПЛА для алгоритмів орієнтації.
Даний мікроконтролер має всі необхідні компонентами і характеристиками для вирішення поставлених завдань, також дана плата підтримує сумісність з програмним пакетом Matlab.[6]
6. Переваги проекту
- Індивідуальність проекту (відсутність інформації про роботу в інтернеті). Мала частка інформації була взята з інтернету.
- Пристрій було зібрано з підручних засобів які були на кафедрі. Тим самим була знижена вартість проекту до мінімальних витрат. Найдорожчими елементами є відладочна плата (близько 2000 руб.) та датчик металу (близько 300 руб.).
- Простота управління пристроєм так само є одним з його переваг.
- Використовується технологія швидкого прототипування.
Тематика розробки мобільного робота САВ Морріган
було розпочато ще в бакалавраті. Відео – огляд на бакалаврську роботу представлений нижче:
На момент написання даного реферату магістерська робота ще не завершена. Орієнтовна дата завершення магістерської роботи: червень 2019 року. Повний текст роботи та матеріали по темі можуть бути отримані у автора або його керівника після зазначеної дати.
Перелік посиланнь
- Устройство роботов.[Электронный ресурс] – Режим доступа: mechs.su..., доступ свободный.
- С. Г. Колпаков, А. Д. Мячиков. Классификация роботов по использованию, передвижению и компонентам // Молодой ученый. – 2017. – №3.[Электронный ресурс] – Режим доступа: moluch.ru..., доступ свободный.
- В. Ярополов Как работает сервопривод?[Электронный ресурс] – Режим доступа: www.rc-auto.ru..., доступ свободный.
- Ультразвуковой датчик измерения расстояния HC–SR04.[Электронный ресурс] – Режим доступа: robocraft.ru..., доступ свободный.
- STM32F4DISCOVERY.[Электронный ресурс] – Режим доступа:www.st.com..., доступ свободный.
- Отладочная плата STM32F4 Discovery.[Электронный ресурс] – Режим доступа: robotosha.ru... , доступ свободный.
- S3003 Futaba Servo.[Электронный ресурс] – Режим доступа: ww.es.co.th..., доступ свободный.
- L298N.[Электронный ресурс] – Режим доступа: www.alldatasheet.com..., доступ свободный.
- HC–06.[Электронный ресурс] – Режим доступа: www.olimex.com..., доступ свободный.