
Реферат за темою випускної роботи
Зміст
- 1. Рука антропоморфного робота.
- 2.Програмована плата
- 3.Використовуваний двигун для ліктьового суглоба..
- 4. Кріплення для двигуна ліктьового суглоба.
- 5.Аналогічний спосіб управління.
- 6.Висновки
- Посилання
1.Рука антропоморфного робота.
У новій роботі відбувається створення руки антропоморфного робота. На відміну від минулого пристрої, дане матиме не тільки кистьовий суглоб, але і ліктьовий і передпліччя. На даний момент основним завданням є вивчення будови руки людини і створення її аналога за допомогою сучасних технологій. Будова руки людини досить складне, що ускладнює створення її аналога. Розробка такого пристрою є досить значущий внеском як в науку, так і в життя людини. Велика частина протезів виготовляються за кордоном, що підвищує їх вартість, яка і так досить велика. На даний момент існує кілька видів протезів руки, а саме: косметичні і функціональні. Основною функцією косметичних протезів є відтворення зовнішнього вигляду людської руки. У той же час функціональний протез не має такого ж красивого зовнішнього вигляду як косметичний, але він забезпечує кілька основних функцій, таких як хват. Функціональні протези також діляться на робочі, тягові і міоелектріческой. Найвища вартість у міоелектричних (біонічних), так як вони є найбільш сучасними. Але не всі антропоморфні роботи використовуються в якості протезів. Вони отримали велике застосування в областях, де необхідно щоб управління якимось технологічним процесом виконувалося оператором дистанційно, наприклад, в агресивних середовищах, космосі або просто в важкодоступних для людини місцях.
Для даної біоелектричної моделі руки був обраний спосіб управління за допомогою електроміографічного датчика. Для того, щоб зрозуміти, як працює цей датчик потрібно ознайомитися з тим, як влаштована рука людини, що також допоможе і з проектуванням самою конструкцією руки антропоморфного робота.
Електроміографічний датчик– це датчик, який знімає електроміограму з м'язів оператора. Найчастіше інформація знімається за допомогою трьох електродів, які розташовуються на руці оператора. Крім трьох електродів до складу датчика входить спеціальний драйвер, який розпізнає одержуваний сигнал, обробляє його і передає на програмну плату..

Рисунок 1 – Електроміографічний датчик.
Але цю отриману з датчика інформацію потрібно повторно обробити і передати на привід, для здійснення якоїсь дії, руху. Процес зняття інформації з допомогою цього датчика досить складний. Електроди потрібно встановити таким чином, щоб один з них перебував на середині вимірюваної м'язи, другий – на її кінці і третій – на ділянці руки, на якому немає м'язи, тобто на кістки ліктьового суглоба. Інформація, яку вилучили з допомогою цього датчика також може бути неточною, тому потрібно застосовувати купу дій для обробки сигналу, такі як відсікання шумів. Потрібно обробляти як помилковий, так і корисний сигнал і вміти їх відрізняти. Даний датчик знімає інформацію не тільки про ліктьовому і плечовому суглобі, але і кисті. Кожен рух – це різні імпульси. При налаштуванні даного датчика потрібно навчитися відрізняти сигнали, які приходять на плату. Приклад підключення датчика до плати і самої руці оператора можна побачити на малюнку нижче (рис.). На появу шумів і неточностей при знятті сигналу за допомогою цього датчика так само впливає кілька чинників, які теж потрібно враховувати, а саме: при установці датчиків на руку оператора вимагається прочистити спиртом або якимось іншим схожим за своїми хімічними властивостями речовиною як ділянки накладення на шкіру електродів, так і самі електроди в точці прикладання. Якщо знехтувати цим, то знімаються сигнал може як з'явитися з великою кількістю шумів, так і не з'явитися взагалі.
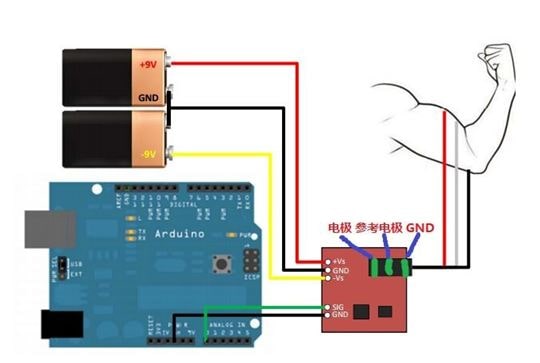
Рисунок 2 – Підключення електороміографічного датчика.
2.Програмована плата.
Для обробки цієї інформації і передачі її на привід буде використовуватися плата STM32F4DISCOFERY [ 10 ]. Вибір припав на дану плату, так як вона має більш широкий функціонал і технічні характеристики, якщо порівнювати з платою, яка використовувалася в попередньому проекті, а саме Arduino Deumilanove.
Дана плата також має ще величезну кількість характеристик, наведемо основні з них:
* 32–бітний ARM–мікроконтролер STM32F407VGT6 сімейства Cortex–M4 (Частота: до 168 МГц. Пам'ять програм (Flash): 1 МБайт. ОЗУ (RAM): 196 Кбайт. Можливість налагодження по JTAG або SWD).
* Отладчик і програматор ST–Link / V2 для налагодження і прошивання мікроконтролеру STM32F407VGT6 розміщений на самій платі STM32F4DISCOVERY і є можливість перемикати його на програмування і налагодження інших плат і контролллеров. через виведення роз'єм SWD і перемички.
* Висновки для подачі зовнішнього живлення + 5V і можливість заживлення інших пристроїв від + 5V і + 3V.
* Кнопка скидання (RESET) мікроконтролера STM32F407VGT6.
* Чотири світлодіода і одна кнопка, доступні для програмування
3.Використовуваний двигун для ліктьового суглоба.
В даному проекті для здійснення руху ліктьового суглоба буде використовуватися двигун Namiki 22CL–3501PG. Вибір припав на цей двигун, так як він має досить невисоку вартість і може забезпечити хороші характеристики роботи. Namiki 22CL–3501PG – це двигун постійного струму з вбудованим енкодером.
Даташит даного двигуна:
* Brand: Namiki Coreless Motor (Japan)
* Model: 22CL–3501PG
* Operating Voltage: 12VDC
* Rated power: 15W
* Stall torque: 16.5kg*cm
* Continuous torque: 5kg*cm
* Diameter: 22mm
* Shaft length: 19mm (with 90–degree double–cut)
* Length: 65mm (includes encoder gear box)
* Stall current: 1.8A
* Reduction ratio: 80:1 (metal planetary reduction gear)
* Output speed: 120 RPM@12VDC
* Weight: 140g
4. Кріплення для двигуна ліктьового суглоба.
На даний момент спроектована 3–D модель для кріплення даного двигуна і відтворена за допомогою 3–D принтера, розташованого на кафедрі. Для друку використовується звичайний ABS пластик.
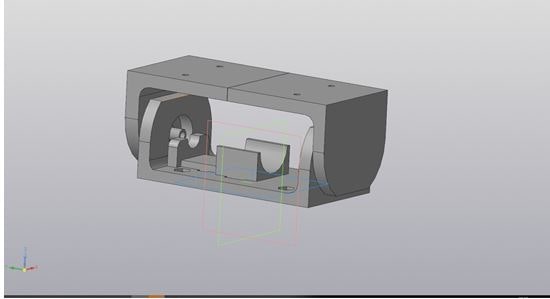
Рисунок 3 – Спроектована частина кріплення двигуна
Дана конструкція дозволяє здійснювати поворот ліктьового суглоба на 180 градусів, що є досить важливим аспектом в управлінні.

Рисунок 4 – Відтворена частина кріплення двигуна ліктьового суглоба.
5.Аналогічний спосіб управління.
Управління ліктьовим суглобом також можливо за допомогою датчика вигину (Flex sensor). Принцип роботи датчика досить простий. Він заснований на фоторезистори і над'яскравих світлодіодів, які знаходяться на різних кінцях силіконової трубки. Світло надходить на фоторезистор по цій трубці і в залежності від потоку світла, що приходить на фоторезистор, він змінює свій опір на виході. Сигнал, що надходить з датчиків, приходить на програмну плату, обробляється і подається на сервопривід, які в свою чергу починають рух і призводять пальці робо–руки в рух. Даний датчик дуже чутливий, тому для того, щоб використовувати його в проекті потрібно реалізувати фільтрацію сигналу. Є два способи реалізації цього завдання: програмна та апаратна. Найпростіший спосіб – програмна реалізація. Так як в минулій роботі вже використовувалися ці датчики, то також можна використовувати вже готові програмно реалізовані фільтри.
Рисунок 5 – модель частини крепепленія для двигуна ліктьового суглобаt
(анімація: 10 кадрів, 7 циклів повторення, 220 кілобайт)
6.Висновоки
- У даній роботі була представлена розроблена робо–рука імітує рухи, які виконуються оператором з сенсорної рукавичкою.
- Цей пристрій використовується як прототип для створення антропоморфних роботів, а також систем віддаленого управління в важкодоступних місцях, протезів.
- У даній роботі досліджена тема створення електромеханічних протезів, розроблена і реалізована ліктьова частина пристрою біонічної руки. Досліджувана конструкція була модернізована і відтворена [ 10 ]. Було проаналізований будова руки людини, а також способи управління ліктьовим суглобом руки антропоморфного робота.
Посилання.
- Программирование Ардуино [Электронный ресурс] : Справочник языка Ардуино, Украина, [2003]. URL: http://arduino.ua/... (дата обращения: 30.11.2016).
- Программирование Arduino –; библиотека Servo [Электронный ресурс]: сайт создания роботов , 29 мая 2010. URL : http://robocraft.ru/...(дата обращения: 30.11.2016).
- Роботизированная рука с использованием Arduino [Электронный ресурс]: блог сайта Arduino, США, 24 июня 2014. URL : https://blog.arduino.cc/... (дата обращения: 01.12.2016).
- Использование датчика Flex [Электронный ресурс]: Проект сайта sparkfun.com, США. URL : https://learn.sparkfun.com/... (дата обращения: 20.11.2016).
- Гринь В.В., Басалыгин Е.В., Розкаряка П.И. Разработка аппаратной части Робо–;руки на базе платы Arduino / Международная научно–;практическая конференция ИННОВАЦИОНЫЕ ПЕРСПЕКТИВЫ ДОНБАССА // Перспективы развития электротехнических, электромеханических и энергосберегающих систем, 2017. –; 230–;233с., [Электронный ресурс]. Режим доступа: http://ipd.donntu.ru
- Определение сервопривода [Электронный ресурс] . Режим доступа: http://dic.academic.ru/...
- Рука и предплечье [Электронный ресурс]: Проект сайта inmoov.fr, США. URL : http://inmoov.fr/... (дата обращения 16.01.2017).
- Виды протезов рук [Электронный ресурс]. Режим доступа: : http://motorica.org/... (дата обращения 14.04.2018).
- Бионический протез руки [Электронный ресурс]. Режим доступа: : http://mech.spbstu.ru/... (дата обращения 14.04.2018).
- Разработка и анализ функционального протеза руки с нейрофизиологической системой управления [Электронный ресурс]. Режим доступа: : https://boomstarter.ru/... (дата обращения 14.04.2018).
- Строение руки человека [Электронный ресурс]. Режим доступа: : https://www.eurolab.ua/... (дата обращения 14.04.2018). <
- Плата STM [Электронный ресурс]. Режим доступа: : http://firsthand.ru/... (дата обращения 14.04.2018).