
Реферат по теме выпускной работы
Содержание
- Введение
- Актуальность темы
- Особенности асинхронного электропривода с частотным регулированием
- Моделирование системы электроснабжения с распределенной генерацией и ее исследование при различных режимах работы
- Применение частотно–регулируемого электропривода при пуске АД
- Заключение
- Список источников
Введение
В настоящее время в отраслях экономики появляется много промышленных предприятий, автоматических насосных станций, электроприводов типовых производственных механизмов, позволяющих решить различные технологические проблемы предприятий. При подключении насосных станций и других электроприемников к электрической сети возникает зависимость этих потребителей от электрической сети, в свою очередь стабильность работы электрической сети влияет на экономическую эффективность предприятий.
В последнее время все чаще внедряется частотное регулирование электропривода, обеспечивающее ряд положительных эффектов. Использование частотно-регулируемого электропривода оказывает существенное влияние на качество электрической энергии и существенно изменяет свойства и режимы работы систем электроснабжения, особенно при наличии в системе электроснабжения установок распределенной генерации. В связи с этим разработка моделей, рассматривающих динамическое поведение системы электроснабжения с распределенной генерацией и использованием частотно–регулируемого электропривода, является актуальной задачей.
Объектом исследования данной работы является система электроснабжения с распределенной генерацией и электроприводом переменного тока.
Целью работы является разработка и исследование моделей динамических режимов системы электроснабжения с распределенной генерацией при использовании нерегулируемых и частотно-регулируемых электродвигателей.
Актуальность темы
Электростанция является важной частью электрической системы. С точки зрения экономии, чем мощнее электростанция, тем выше ее экономическая эффективность. Однако в зависимости от поставок первичных энергоресурсов, электростанции часто располагаются на значительном удалении от потребителей, от жилых районов.
Система передачи и распределения будет брать на себя задачу передачи электроэнергии от электростанции до потребителя. Это модель централизованного производства электроэнергии в традиционном виде, когда расходы на транспорт топлива и строительство электростанций вблизи центров нагрузок значительно превышают стоимость строительства электрической сети для передачи и распределения.
Аварии в электрической системе происходят в основном в сети передачи и распределения электроэнергии, особенно из–за коротких замыканий на линиях или перегрузки на трансформаторных подстанциях. Таким образом, электрическая сеть стала основным фактором в структуре себестоимости электроэнергии и проблемах, связанных с качеством электроснабжения. Кроме того, требования обеспечения надежности электроснабжения и качества электроэнергии потребителям все более увеличиваются, требуя от электроэнергетики соответствующих шагов в строительстве энергетических систем и электрических сетей.
Вышеперечисленные проблемы являются основой для исследования, связанного с использованием распределенной генерации. Распределенная генерация – генерация, присоединенная к распределительной сети на среднем (1–30кВ) и низком (менее 1кВ) напряжении (генерация, присоединенная к высоковольтной сети свыше 69кВ не относиться к этой категории). Она основана на производстве электроэнергии малыми установками, расположенными вблизи или в точке потребления энергии.
Хотя эта модель имеет менее высокую экономическую эффективность по сравнению с моделью централизованного производства электроэнергии, но имеет избыточность и большую надежность электроснабжения из–за не слишком большой зависимости от электрической сети для передачи и распределения электроэнергии (рис. 1.1).
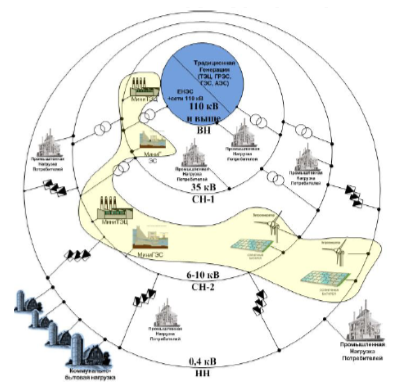
Рисунок 1.1 – Структура сетей с распределенной генерации энергии
Кроме того, эта модель приносит потребителям возможность использования электроэнергии независимо, потому что они могут управлять электростанцией для самообслуживания. Однако раньше технология электростанций малой мощности имела высокую стоимость и низкую эффективность. С учетом современных технологий, мы можем установить электростанции средних мощностей с высокой производительностью и низкой ценой, размещая их рядом с местами потребления электроэнергии. Это не только снижает затраты на передачу энергии, но и уменьшает отказы и экономические ущербы.
Противодействуя риску изменения климата и стихийных бедствий, во многих странах по всему миру начали изучать проекты Планирования адаптации
, в том числе имеются проекты строительства локальной распределенной генерации, обеспечивая поставку бесперебойного питания особенно важным нагрузкам, например полиции, пожарным частям и больницам. Модель распределенной генерации может быть использована в отдаленных районах и на островах, где централизованная подача электричества будет слишком трудной, сложной и потребует больших расходов.
Источниками энергии для распределенной генерации могут быть различные установки, такие как топливные элементы, возобновляемые источники энергии (энергия ветра, солнечная энергия, энергия отходов, и т.д.). В настоящее время ветроэнергетические установки и солнечные панели довольно популярны в мире. Распределенная генерация была разработана как подход к использованию возобновляемых источников энергии, не перегружая электрической сети. Это одна из мер, принятых странами во всем мире, которая используется для снижения выбросов парниковых газов. Австралия, Германия стремятся использовать 80% возобновляемых источников энергии для производства электроэнергии в 2050 году, Канада и Новая Зеландия предлагают цифру в 90% для этой цели в 2025 году [1, 2].
Особенности асинхронного электропривода с частотным регулированием
Регулируемый электропривод находит все большее применение в промышленности и различных технологических машинах. Его использование позволит обеспечить автоматизацию многих технологических процессов, получить сложное движение промышленных машин, снизить энергопотребление в различных областях деятельности человеческого общества.
Еще в конце прошлого века доминирующим электроприводом в тех установках, где требовалось в широком диапазоне регулировать скорость, являлся электропривод постоянного тока. Главным недостатком электроприводов постоянного тока всегда было наличие коллекторно–щеточного аппарата электрической машины, который требует особого обслуживания, при неправильной эксплуатации снижает эксплуатационную надежность машины и ограничивает динамические характеристики электропривода в целом. Поэтому по мере развития микропроцессорной и силовой полупроводниковой техники, регулируемые электроприводы постоянного тока стали вытесняться бесколлекторными регулируемыми электроприводами переменного тока. В первую очередь это система (преобразователь частоты – асинхронный электродвигатель), которая обеспечивает требуемые характеристики движения исполнительного органа для большинства технологических машин.
Современный частотно–регулируемый электропривод состоит из асинхронного или синхронного электрического двигателя и преобразователя частоты (ПЧ) как показан на рис.1.2.

Рисунок 1.2 – Частотно–регулируемый электропривод
Электрический двигатель преобразует электрическую энергию в механическую энергию и приводит в движение исполнительный орган (ИО) технологического механизма. Преобразователь частоты управляет асинхронным двигателем и представляет собой электронное статическое устройство, состоящее из выпрямителя (В) и инвертора (И). На выходе преобразователя формируется напряжение с переменными амплитудой и частотой. Название частотно–регулируемый электропривод
обусловлено тем, что регулирование скорости вращения двигателя осуществляется изменением частоты напряжения питания, подаваемого на двигатель от преобразователя частоты.
Развитие современной промышленности в условиях рыночной конкурирующей среды характеризуется все большим использованием эффективных технологий в различных сферах производства. Это возможно при условии повышения качества технологических процессов, в том числе за счет использования высокоэффективных систем управления технологическими объектами [3, 4].
В настоящее время применение автоматизированного электропривода обеспечивает требуемые регулировочные характеристики используемых машин и механизмов, а также позволяет значительно снизить потребление электроэнергии. Активное развитие силовой электроники и быстродействующей микропроцессорной техники привело к вытеснению используемых до 70–80-х годов прошлого века регулируемых ЭП постоянного тока приводами на основе асинхронных двигателей с короткозамкнутым ротором. Это объясняется возможностью практической реализации эффективных алгоритмов управления двигателем переменного тока при небольших аппаратных и материальных затратах [5].
Сегодня в мире выпускается до 8 млрд. электродвигателей в год, которые потребляют 70% произведенной электроэнергии. Ежегодно рынок электрических машин и электроприводов для них возрастает на 5–10%. В настоящее время доля ЭП переменного тока составляет порядка 85% [6].
Область применения регулируемых ЭП весьма обширна: от крупной электроэнергетики до различных сфер коммунального и бытового хозяйства. Использование регулируемых электроприводов позволяет снизить потребление электроэнергии на 20–50% за счет использования механизмов, в которых двигатели рассчитаны на максимальную нагрузку, а среднесуточная нагрузка составляет 60–80%. Таким образом, применение регулируемых электроприводов позволяет создать новую технологию энергосбережения, использование которой не только экономит электрическую энергию, но и увеличивает срок службы оборудования.
Ранее электроприводы постоянного тока не имели серьезных конкурентов в области регулируемых ЭП, однако при их использовании выявлялись серьезные недостатки [7, 8]:
- сложная конструкция и большая масса;
- критичный в эксплуатации щеточный аппарат;
- высокая стоимость.
В настоящее время появление новой элементной базы и использование современных средств микропроцессорной техники позволяет разработчикам создавать компактные, многофункциональные и высокоэффективные системы управления ЭП переменного тока, которые удовлетворяют требованиям большинства технологических процессов [4]. К преимуществам таких систем управления можно отнести:
- качественное управление скоростью;
- высокий момент при низких скоростях;
- низкие потери и высокую эффективность;
- высокие динамические характеристики;
- стабильную работу с мощными двигателями.
Проведенный обзор научной литературы показал, что современный этап развития ЭП характеризуется активным применением регулируемого привода переменного тока, который является самым перспективным, надежным и экономически выгодным способом преобразования электрической энергии в механическую энергию.
Вместе с большим количеством преимуществ частотно-регулируемый привод имеет и недостатки: большинство его моделей являются источником электромагнитных помех, а частотно-регулируемые приводы большой мощности сравнительно дороги. Наибольший эффект от использования частотно-регулируемых приводов проявляется при их включении в автоматизированные системы управления технологическими и производственными процессами [9].
Моделирование системы электроснабжения с распределенной генерацией и ее исследование при различных режимах работы
На данный момент существует не один десяток программ, где можно произвести моделирование систем электроснабжения. В данной работе разработка и реализация модели была разработана в среде Matlab/Simulink. Она позволяет получить динамические характеристики асинхронного двигателя и исследовать его поведение в нормальных и аварийных режимах работы.
В последнее время потребители, имеющие асинхронный электропривод, все более активно используют его частотное регулирование, что повышает эффективность работы асинхронного электропривода. Для ЧРЭП характерны специфические особенности динамики поведения в переходных процессах, которые требуется исследовать.
В моделях используются следующие основные блоки:
- Для реализации внешнего источника напряжения использовался блок Three–Phase Sourse (трехфазный источник напряжения) с напряжением 10 кВ, частотой 50 Гц, мощностью КЗ 100 МВА;
- Трансформатор (Тр) моделировался блоком Three–Phase Transformer (Two Windings) – трехфазный двухобмоточный трансформатор;
- Выпрямитель, питающий инвертор через связь постоянного тока, моделировался блоком Universal Bridge (Diode bridge) – трехфазный выпрямитель звезда Ларионова (шестипульсный);
- Инвертор используется как источник переменной частоты переменного напряжения для питания АД, используя блок Universal Bridge (IGBT/Diode bridge) – биполярный транзистор с изолированным затвором, управляется в замкнутой системе с ПИ – регуляторами (тока и скорости), чтобы регулировать двигатель;
- Нагрузка, имитирующая остальных потребителей электроэнергии, подключенная к шинам источника напряжения ЭЭС, представлена блоком 3-Phase Series RLC Load, моделирующим трехфазную цепь, состоящую из трех последовательных RLC–нагрузок. Схема соединения цепей – треугольник. Параметры трехфазной нагрузки следующие: U=0.4кВ, P=10 кВт, Q=0 кВАР, f=50 Гц;
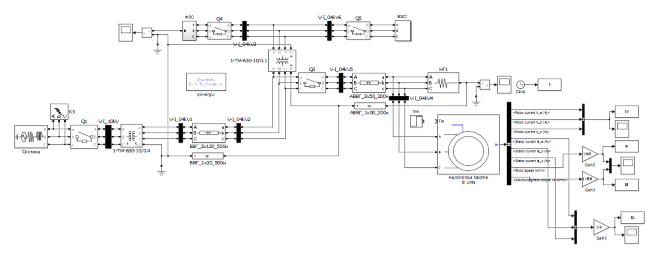
Рисунок 1.3 – Модель для исследования АД с прямым включением в сеть

Рисунок 1.4 – Модель для исследования ЧРЭП
Применение частотно–регулируемого электропривода при пуске АД
Известно, что прямой пуск несет в себе ограничения, которые не позволяют его применять в некоторых приложениях:
- Бросок тока при старте может вносить помехи в работу других приборов, подключенных к той же линии питания;
- Механическая ударная нагрузка в процессе старта может оказаться недопустимой для устройства или может оказать вредное воздействие на комфорт и безопасность пользователя;
- Невозможно управлять разгоном и торможением;
- Невозможно регулировать скорость.
На основе построенной модели выполнено исследование пуска асинхронного двигателя с помощью частотного преобразователя (рис. 1.5–1.6).


Рисунок 1.5 – Напряжения высокой и низкой стороны питающего трансформатора без(а,б) и с(в,г) ФЭС(ВЭС)


Рисунок 1.6 – Момент, скорость и токи двигателя в относительные единицах(а,б) и с(в,г) ФЭС(ВЭС)
На графиках видно, что применение ЧРЭП позволяет избавиться от просадки напряжения питающего трансформатора. Необходимо заметить, что время пуска АД меньше, чем при случае прямого пуска, а так же то, что использование ЧРЭП дает более плавный пуск(пусковые токи не превышают 2 крат от номинала) и может осуществляться в маломощной сети. Благодаря ЧРЭП снижается вероятность перегрева обмоток, пуск проходит плавно (без резких скачков тока и момента).
Однако при применении ЧРЭП возникают гармонические искажения в сети. Согласно ГОСТ 32144-2013 значение суммарных коэффициентов гармонических составляющих напряжения сети 0,38 кВ имеет нормально допустимые значение 8,0% (предельно допустимое значение до 12%). Суммарный коэффициент гармонических составляющих напряжения KU определяется последующему выражению:
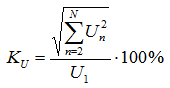
где
- Un – действующее значение n-ой гармонической составляющей напряжения;
- n – порядок гармонической составляющей напряжения;
- N – порядок последней из учитываемых гармонических составляющих напряжения (стандартом устанавливается N=40);
- Ui – действующее значение напряжения основной частоты.
На рисунке 1.6 представлены осциллограммы напряжений на шинах трансформатора при отключении и включении распределенной генерации в системе электроснабжения. Из рисунка 1.7 видно, что коэффициенты высших гармоник лежат в допустимых пределах. Поскольку гармонические искажения напряжения питания зависят от соотношения мощности питающего источника и суммарной мощности нелинейных потребителей, то чем мощнее сеть, тем меньше уровень гармонических искажений. Поэтому распределенная генерация позволяет снижать коэффициент высших гармоник в сети.

Рисунок 1.7 – Напряжение на выходе питающего трансформатора без(а) и с(б) подключением ФЭС(ВЭС)

Рисунок 1.8 –Гармонический состав сетевого напряжения без(а) и с(б) подключением ФЭС(ВЭС)
Заключение
В работе рассмотрено исследование актуальной научно–технической задачи, состоящей в использовании двигателей переменного тока (нерегулируемых и частотно–регулируемых) в системе электроснабжения с распределенной генерацией энергии.
Разработана имитационная модель СЭС с распределенной генерацией, нерегулируемым и частотно–регулируемым электроприводом и частично выполнены исследования влияния разных факторов на работу сети и двигателя при различных режимах работы. На момент написания реферата магистерская работа еще не окончена. Дальнейшая работа будет направлена на расчеты, моделирование и обработку полученных результатов.
Список литературы
- Збигниев А.,
Возобновляемые источники энергии: теоретические основы, технологии, технические характеристики, экономика
, MAFO, Том 34, Магдебург–Иркутск, 2010, 220 с. - Черных И. В.,
Моделирование электротехнических устройств в MATLAB, SimPowerSystems и Simulink
– М.: ДМК Пресс; СПб.: Питер, 2008. – 288 с.: ил. ISBN 5–94074–395–1 (ДМКПресс
), ISBN 978–5–388–00020–0 (Питер
) - Водовозов В. М. Теория и системы электропривода: учеб. пособие / В.М. Водовозов. – СПб. : Изд-во СПбГЭТУ
ЛЭТИ
, 2004. – 306 с. - Гуляев И. В. Системы векторного управления электроприводом на основе асинхронизированного вентильного двигателя: монография / И. В. Гуляев, Г. М. Тутаев // Саранск.: Изд-во. Саранского ун-та, 2010. – 200 с.
- Фролов Ю. М. Состояние и тенденции развития электропривода/ Ю.М. Фролов // Электрические комплексы и системы управления. – 2006. – №1. – С. 4–10.
- Колпаков А. И. Перспективы развития электропривода/ А. И. Колпаков// Силовая электроника. – 2004. – №1. – С. 46–48.
- Иванов – Смоленский А. В. Электрические машины / А. В. Ивано–Смоленский // М.: Энергия. – 1980г. – 928с.
- Копылов И. П. Электрические машины: учеб. для вузов / И.П. Копылов. – М.: Энергоатомиздат. – 1986. – 360 с.
- Недолугий С. В. О преимуществах применения частотно–регулируемых электроприводов / С. В. Недолугий // Энергетик. – 2010. – №9. – С. 21–24.