
Реферат за темою випускної роботи
Зміст
- Вступ
- 1. Актуальність теми
- 2. Мета і задачі дослідження, заплановані результати
- 3. Вимогии до системи імпульсно-фазового керування
- 4. Огляд відомих сімейств мікроконтролерів
- 5. Реалізація алгоритму керування
- 6. Модель системи ТРН-АД
- 7. Дослідження впливу похибки
- Висновки
- Перелік посилань
Вступ
Цифрові системи управління набули широкого поширення за кілька останніх років. У даних системах інформація міститься не в таких параметрах сигналів, як величина напруги або струму, а в числах, представлених зазвичай в двійковому коді. Для формування, передачі і перетворення двійкових сигналів в цифрових системах управління використовуються окремі елементи цифрової техніки, тобто регістри, лічильники, логічні елементи, а також мікропроцесорні комплекти, спеціалізовані або універсальні цифрові обчислювальні машини.
Цифровими системами з комп'ютерним управлінням можна керувати за допомогою програмного забезпечення, додаючи нові функції без заміни апаратних засобів. Часто це може бути зроблено без участі заводу-виробника шляхом простого оновлення програмного продукту. Подібна функція дозволяє швидко адаптуватися до зміни вимог. Крім того, можливе застосування складних алгоритмів, які в аналогових системах неможливі або ж здійсненні, але тільки з дуже високими витратами.
Зберігання інформації в цифрових системах простіше, ніж в аналогових. Стійкість до перешкод цифрових систем дозволяє зберігати та видавати дані без пошкодження. В аналоговій системі старіння і знос може погіршити записану інформацію. У цифровій же, до тих пір, поки загальні перешкоди не перевищують певного рівня, інформація може бути відновлена абсолютно точно.
Застосування цифрових систем дозволяє усунути основні недоліки аналогових систем управління. Разом з тим, слід зазначити, що широке використання цифрових систем управління поки що стримується їх великою вартістю і складністю розробки.
Дуже важливим є те, що математичний опис і аналіз більшості сучасних цифрових систем управління базуються на методах аналізу аналогових систем.
1. Актуальність теми
В процесі розвитку науки і техніки підвищуються вимоги до виробничих процесів. Оскільки аналогові системи не завжди задовольняють поставленим завданням, все більшої актуальності набувають системи цифрового управління.
Аналогові системи сприйнятливі до зміни зовнішніх впливів, характеризуються низькою точністю передачі аналогових сигналів на великі відстані і трудомісткі в налаштуванні. Все це призводить до зниження якості управління.
Крім того, управління виробничими процесами вимагає логічної ув'язки різної інформації і даних. Тому виникла необхідність розробки мікропроцесорної системи імпульсно-фазового керування (СІФК).
2. Мета і задачі дослідження, заплановані результати
Магістерська робота присвячена розробці та дослідженню програмного алгоритму СІФК тиристорного регулятора напруги (ТРН).
Метою роботи є створення програмного алгоритму керування (АК), який буде характеризуватися ефективністю, гнучкістю, швидкодією і оптимальністю, а також визначення впливу похибки роботи СІФК на роботу системи тиристорний регулятор напруги – асинхронний двигун (ТРН-АД).
Для досягнення поставленої мети в роботі необхідно вирішити наступні завдання:
- розробити власний АК;
- розробити математичну модель системи ТРН-АД;
- виконати аналіз впливу похибки кута керування на амплітуду коливань моменту і відхилення кутової швидкості двигуна;
- досягти необхідної точності при формуванні керуючих імпульсів.
3. Вимогии до системи імпульсно-фазового керування
СІФК називається сукупність пристроїв і елементів, яка забезпечує задану послідовність вихідних імпульсів.
Вимоги, що пред'являються до СІФК вентильного перетворювача, визначаються типом вентиля, режимом роботи і видом навантаження.
Основними вимогами до СІФК:
- Керуючий імпульс повинен мати достатню для надійного відмикання вентиля амплітуду напруги і струму (для тиристорів 10-20 В, 20-2000мА).
- У СІФК крутизна переднього фронту імпульсу повинна бути в діапазоні 150-200 В/ел.град і більш.
- Забезпечення мінімально необхідної тривалості відкриваючих імпульсів (від 5 до 20 мкс).
- Широкий діапазон регулювання визначається типом перетворювача, режимом його роботи і характером навантаження.
- Імпульси управління повинні бути симетричні.
- СІФК не повинна впливати на швидкодію регульованого перетворювача.
Оскільки необхідно реалізувати АК силовим ТРН, то додається ряд вимог визначають ефективність програмного рішення.
Ефективність АК мікропроцесорною СІФК визначається наступними параметрами:
- Можливість реалізації алгоритму на базі недорогих однокристальних мікроконтролерів (МК).
- Точність виконання часових затримок для кожного вихідного каналу.
- Гнучкість алгоритму, що дозволяє без істотних доробок змінювати порядок комутації, в тому числі введення додаткових функцій.
4. Огляд відомих сімейств мікроконтролерів
Для програмної реалізації АК необхідно вибрати МК. Розглянемо доступні варіанти.
AVR – восьмибітні МК компанії Atmel. Мають гарвардську архітектуру і RISC-ядро з більш розвиненою системою команд, яка налічує до 133 інструкцій. Більшість інструкцій виконується за один такт. Програмне забезпечення поширюється безкоштовно. Всі МК сумісні між собою від ранніх до пізніх версій. Можливе програмування на мові високого рівня C.
Arduino – платформа для швидкої розробки різних електронних систем. Переважно в пристроях Arduino застосовуються AVR МК. Мова програмування платформи заснована на C/C++. Arduino має повністю відкрите програмне і апаратне забезпечення.
STM32 – 32-розрядний МК з Flash-пам'яттю на основі ядра ARM Cortex-M. Дані МК мають гарвардську архітектуру і вдосконалену RISC-архітектуру ядра. Cortex – мікроконтролерне ядро, що включає в себе різну периферію. Підродина Cortex-M призначена для мікроконтролерних додатків, коли потрібна мала вартість і низьке енергоспоживання. МК STM32 сумісні знизу вгору
. Є широкий вибір налагоджувальних плат.
Існують і інші досить поширені сімейства МК, такі як:
- MCS 51 – 8-бітний однокристальний МК з гарвардською архітектурою компанії Intel;
- MSP430 – 16-бітний МК з фон-неймановською архітектурою компанії
Texas Instruments
; - PIC – 8-ми, 16-ти і 32-бітові МК з гарвардською архітектурою компанії Microchip Technology.
Але вони не мають істотних переваг в порівнянні з розглянутими вище системами (AVR і STM32 родинами МК).
Далі розглянемо переваги і недоліки кожного з прийнятих рішень.
МК AVR компанії Atmel мають наступні характеристики:
- RISC-архітектура ядра процесора;
- 8-розрядне мікропроцесорне ядро;
- гарвардська архітектура (зберігання інструкцій і даних в різних адресних просторах);
- 32 8-бітових регістра загального призначення;
- енергонезалежна Flash-пам'ять програм 1 до 256 Кбайт;
- кількість циклів перезапису Flash-пам'яті 10000;
- енергонезалежна пам'ять даних EEPROM від 64 Байт до 4 Кбайт;
- кількість циклів перезапису EEPROM 100 000;
- оперативна пам'ять SRAM від 64 Байт до 8 Кбайт;
- порти введення/виводу – від 3 до 86;
- таймери-лічильники – від 1 до 4 розрядністю 8-/16-біт;
- сторожовий таймер (WatchDog Timer);
- аналогові компаратори;
- підтримка переривань;
- ШІМ-модулятор (PWM);
- багатоканальний аналого-цифровий перетворювач;
- інтерфейси: UART, SPI, TWI, JTAG, USB, CAN, LIN;
- діапазон напруги живлення від 1,8 В до 5,5 В;
- різні джерела тактових імпульсів: кварцовий резонатор, зовнішній або внутрішній RC-генератор;
- тактова частота від 1МГц до 20МГц;
- годинник реального часу RTC (сімейство Mega);
- кілька режимів енергозбереження;
- оптимізація архітектури під язик високого рівня C;
- достатня кількість вільних засобів розробки;
- сумісність МК між собою від ранніх до пізніх версій;
- можливість моделювання роботи МК в середовищі програмного пакету Proteus.
Недоліки МК AVR:
- недостатня швидкодія;
- низька тактова частота;
- мала кількість таймерів;
- відсутність прямого доступу до пам'яті в більшості моделей.
Характеристики платформи Arduino:
- простота освоєння і розробки;
- мови програмування Arduino і С++;
- безкоштовне середовище програмування
Arduino IDE
, яка працює на операційних системах Windows, Macintosh OSX і Linux; - програмування через порт USB (не потрібен програматор);
- широкий вибір різних плат для розширення;
- діапазон напруги живлення від 7 В до 12 В;
- переважно застосовуються МК AVR (плата Arduino Due заснована на процесорі Atmel SAM3X8E ARM Cortex-M3).
Недоліки платформи Arduino:
- висока вартість готових плат;
- низька швидкодія;
- більшість платформ побудовані на МК AVR;
- більше підходить для швидкого освоєння та аматорських проектів, ніж для промислових рішень;
- обов'язкова прошивка завантажувача в пам'ять МК розміром 2 Кбайта;
- об'ємний виконуваний код;
- недостатня компактність готових плат.
Характеристики МК STM32 компанії ARM Limited:
- RISC-архітектура ядра процесора;
- 32-розрядне мікропроцесорне ядро;
- гарвардська архітектура;
- енергонезалежна Flash-пам'ять програм до 1 МБайт;
- оперативна пам'ять SRAM до 320 Кбайт;
- порти введення / виводу до 168;
- кілька таймерів (16- і 32-розрядних);
- спеціальні ШІМ-таймери;
- два сторожових таймера;
- годинник реального часу RTC (внутрішній RC-генератор 32кГц і зовнішній кварцовий резонатор 32,768кГц);
- зовнішній кварцовий резонатор 4…26Мгц;
- вбудований контролер векторних переривань (NVIC);
- 12-розрядний аналого-цифровий перетворювач;
- цифро-аналоговий перетворювач;
- багатоканальний прямий доступ до пам'яті (DMA);
- інтерфейси: UART, SPI, I2C, I2S, JTAG, USB, CAN, LIN, Ethernet;
- діапазон напруги живлення від 1,8 В до 3,6 В;
- тактова частота до 200МГц;
- температурний діапазон -40…105°C;
- достатня кількість вільних засобів розробки;
- кілька режимів енергозбереження;
- сумісність МК
pin-to-pin
і за програмним кодом між собою; - можливо модельно-орієнтоване програмування в пакеті Matlab/Simulink.
Недоліки МК STM32:
- трудомісткість пайки МК;
- більш складне навчання складанню програм для даних МК.
Кожне з розглянутих рішень має свої переваги і недоліки, тому для розробки був прийнятий найбільш доступний і поширений варіант – МК AVR серії ATMega.
5. Реалізація алгоритму керування
Реалізація алгоритму СІФК зводиться до управління тиристорами із здійсненням заданих часових затримок з високою точністю. Часові затримки потрібно здійснювати незалежно для кожного з каналів, а час відраховується від входу синхронізації.
Перший підхід (рисунок 1) полягає у відліку часу за допомогою віртуальних лічильників, що модифікуються при перериванні по переповнення одного інтегрального таймера. Такий підхід дозволяє реалізувати простий алгоритм СІФК, що відрізняється гнучкістю і універсальністю. Однак параметри точності в даному випадку будуть визначатися періодом переривань і на практиці для МК серії AVR складуть 50-100мкс, що в деяких випадках не допустимо.
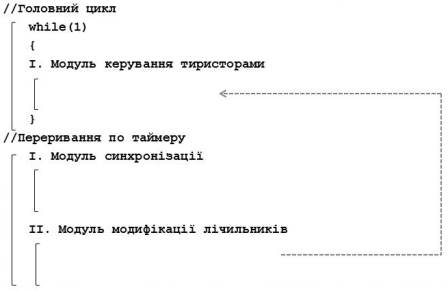
Рисунок 1 – Перший підхід до реалізації АК
У другому підході (рисунок 2) для відліку часів засобами МК зручно використовувати вбудовані інтегральні таймери, причому з огляду на тривалість рахування і вимог до точності рахування, ці таймери повинні бути як мінімум шістнадцятибітні. При цьому такі таймери повинні бути незалежні для кожного каналу, що не реалізоване в доступних МК.
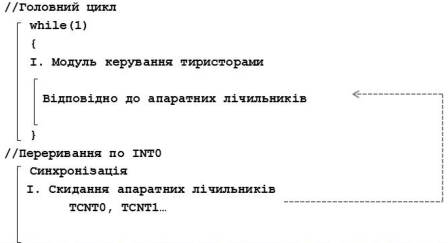
Рисунок 2 – Другий підхід до реализації АК
Альтернативним способом є принцип здійснення часових затримок за допомогою віртуальних лічильників, які модифікуються в основному циклі програми. При цьому лічильники модифікуються на величину часу, який фізично відраховується одним вбудованим інтегральним таймером, при переповненні якого переривання не здійснюються. Для синхронізації при цьому може бути використаний вхід МК, при зміні сигналу на якому формується переривання INT.
Алгоритм, який реалізує описаний вище принцип наведено на рисунку 3. Практично алгоритм для моделювання та подальшого використання реалізований на мові програмування С.
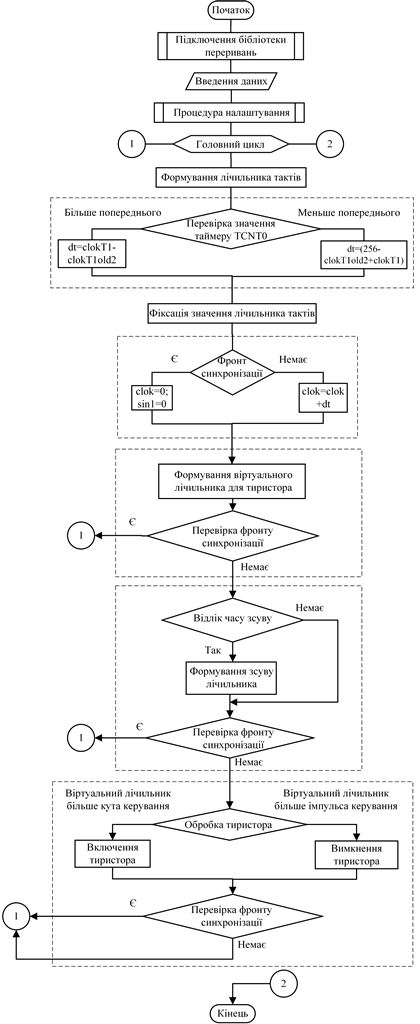
Рисунок 3 – Блок-схема програмного алгоритму
6. Модель системи ТРН-АД
ТРН – пристрій, призначений для регулювання напруги, що подається на асинхронний двигун. ТРН складається з трьох пар тиристорів по одній для кожної фази напруги. Силові елементи включені зустрічно-паралельно для протікання синусоїдального струму в двох напрямках.
ТРН широко застосовуються для регулювання швидкості і плавного пуску асинхронних двигунів різної потужності. Дана схема забезпечує також і реверс, в разі додавання двох пар тиристорів.
Зміна кута відмикання ключів здійснюється за допомогою СІФК.
При розробці програмного алгоритму СІФК виникає питання необхідної точності подачі керуючих імпульсів.
Для досягнення поставленої мети була складена модель (рисунок 4) в середовищі Simulink MATLAB, яка включає в себе: трифазне джерело живлення, підсистему СІФК і ТРН, АД, блок для створення навантаження, блок вимірювань.
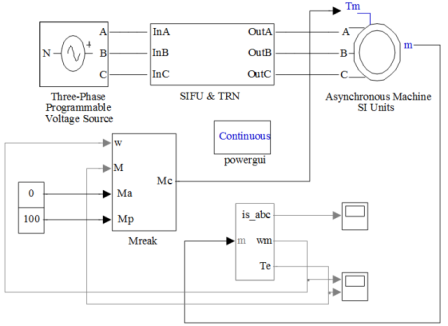
Рисунок 4 – Модель для дослідження роботи СІФК ТРН
При схемі ТРН без нейтрального проводу (рисунок 5), робота фаз регулятора стає залежною, тому необхідно вмикати тиристори попарно для відповідних фаз. Комутація тиристорів здійснюється в наступній послідовності: VS1+VS6, VS6+VS3, VS3+VS2, VS2+VS5, VS5+VS4, VS4+VS1.
Рисунок 5 – Схема ТРН без нейтрального проводу (анімація 6 кадрів, 7 циклів повторення, 37,5 кілобайт)
Всі імпульси управління тиристорами слідують один за одним з інтервалом в 60°. Кут керування, алгоритм подачі і довжина імпульсів описані в m-файлі. Також в ньому задається величина похибки управління в секундах і виконується збільшення кута відмикання позитивного тиристора фази А і негативного тиристора фази С на величину цієї похибки.
При реалізації СІФК для регулятора напруги було враховано, що при куті управління тиристорами α>90°, струм в межах напівхвилі позитивної і негативної полярності розривається. Для цього при включенні тиристора в наступній фазі, подається повторний імпульс на працюючий силовий ключ.
7. Дослідження впливу похибки
В ході дослідження було виявлено, що коливання моменту зростають при збільшенні похибки подачі імпульсу. На рисунку 6 штриховій лінії відповідає момент при відсутності похибки Δt =0мкс, а суцільній – момент при похибці Δt=200мкс. Кут керування дорівнює α=90°. Аналогічна залежність побудована і для кута α=120° (рисунок 7).
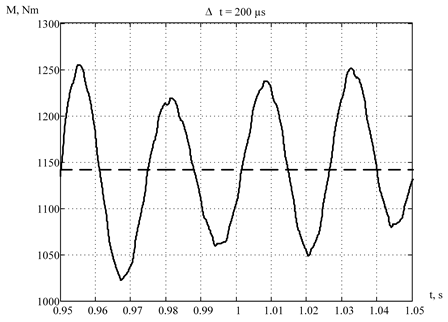
Рисунок 6 – Момент двигуна при Δt=0 мкс та Δt=200 мкс (α=90°)
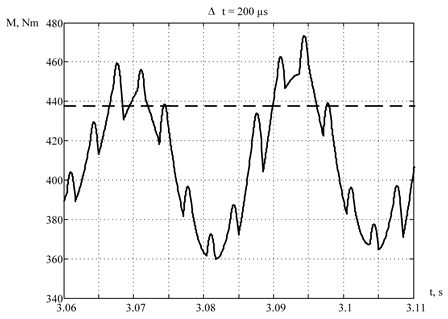
Рисунок 7 – Момент двигуна при Δt=0 мкс та Δt=200 мкс (α=120°)
Для визначення необхідної точності СІФК побудуємо залежність амплітуди коливань моменту і відхилення кутової швидкості від величини похибки для кутів управління α=90° і α=120° (рисунок 8,9).
Отримані залежності показують збільшення амплітуди коливань моменту і зниження кутової швидкості при збільшенні похибки подачі імпульсів керування тиристорами.
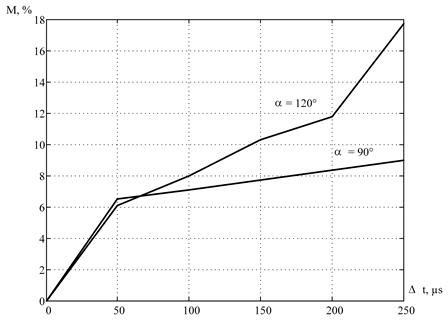
Рисунок 8 – Залежніть амплітуди коливань моменту двигуна від похибки кута керування
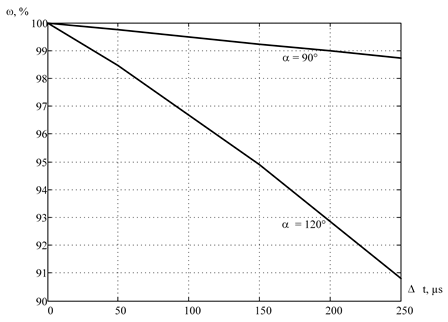
Рисунок 9 – Залежніть відхилення кутової швидкості двигуна від похибки кута керування
На рисунку 8 допустима похибка становить не більше 38-41 мкс, так як амплітуда коливань моменту збільшується до 5%. Для швидкості – не більше 150 мкс (рисунок 9).
Висновки
Відповідно до мети та завдач магістерської роботи проведені теоретичні дослідження СІФК. Описано основні вимоги до СІФК. Також перераховані параметри, що визначають ефективність мікропроцесорного АК.
Виконано огляд відомих сімейств МК. Детально розглянуті їх характеристики, представлені переваги і недоліки. Це дозволило прийняти до розробки МК AVR серії ATMega, як найбільш доступний і поширений варіант.
Проведено аналіз можливих варіантів реалізації програмного алгоритму. На основі даного аналізу був розроблений власний альтернативний підхід до виконання програми управління.
Вивчено принцип роботи системи ТРН-АД, після чого складена модель в додатку Simulink пакета Matlab і приведено її загальний опис. На основі даної моделі виконані дослідження впливу точності подачі керуючих імпульсів на амплітуду коливань моменту і відхилення кутової швидкості. Побудовано залежності для кутів управління α=90° і α=120°. В результаті дослідження моделі роботи системи ТРН-АД визначена максимально допустима похибка СІФК не більше 38 мкс.
На момент написання даного реферату магістерська робота ще не завершена. Орієнтовна дата завершення магістерської роботи: червень 2019 року. Повний текст роботи та матеріали по темі можуть бути отримані у автора або його керівника після зазначеної дати.
Перелік посилань
- Силові напівпровідникові перетворювачі енергії : навч. посібник / О. О. Шавьолкін ; Харків. нац. ун-т. міськ. госп-ва ім. О. М. Бекетова. – Харків : ХНУМГ ім. О. М. Бекетова, 2015. – 403 с.
- Полунин, А. И. Оптимизация систем управления плавного пуска ленточными конвейерами / А. И. Полунин, А. В. Лавшонок // Автоматизация технологических объектов и процессов. Поиск молодых ; сборник научных трудов XVI Международной научно-технической конференции аспирантов и студентов, 25-26 мая 2016 г., г. Донецк : в рамках 2-го Международного научного форума "Инновационные перспективы Донбасса". – Донецк : ДОННТУ, 2016. – С. 190–193.
- Datasheet. ATmega16(L)/ Электронный ресурс. Режим доступа: http://www.atmel.com/...
- Программирование на языке C для AVR и PIC микроконтроллеров./ Сост. Ю.А. Шпак – К.: «МК-Пресс», 2006. 400 с., ил.
- Асинхронный электропривод горных машин с тиристорными коммутаторами. Маренич К. Н. – Донецк: ДонГТУ, 1997 – 64 с.
- Черных, И. В. Моделирование электротехнических устройств в MATLAB, SimPowerSystems и Simulink / И. В. Черных. – Москва : ДМК Пресс, 2007. – 288 с.
- Полунин, А. И., Киселева Я. А. Алгоритм управления системой плавного пуска ленточными конвейерами / А. И. Полунин, Я. А. Киселева, А. В. Лавшонок // Автоматизация технологических объектов и процессов. Поиск молодых: сборник научных трудов ХVII научно-технической конференции аспирантов и студентов в г. Донецке 24-25 мая 2017 г. - Донецк : ДонНТУ, 2017. – 409 с.
- Дьяконов В. Simulink 4. Специальный справочник. – СПб: Питер, 2002 – 528 с.: ил.
- C/C++. Программирование на языке высокого уровня / Т. А. Павловская. – СПб.: Питер, 2003. – 461 с: ил.
- Куцый О.Я. Программирование на языке Си. Пособие прилагаемое к курсам в Центр Компьютерного Обучения при МГТУ им. Н.Э.Баумана. – Москва: МГТУ, 2010. – 84 с.
- Цифровые технологии. Электронный ресурс. Режим доступа: https://ru.wikipedia.org/...
- Васильев К. К. Теория автоматического управления (следящие системы): Учебное пособие.–2-е изд.– Ульяновск, 2001. – 98 с.