
Зміст
- Вступ
- 1. Актуальність теми
- 2. Мета і завдання дослідження
- 3. Огляд існуючих систем стабілізації
- 4. Вибір апаратної частини
- 4.1 L298 Dual H-Bridge драйвер
- 4.2 Понижуючий модуль на мікросхемі MP1584EN
- 4.3 Підвищуючий модуль на мікросхемі XL6009
- 4.4 Радіо модуль NRF24L01 +
- 4.5 Датчик струму на 5A ACS712
- 5. Тестовий зразок моделі
- 6. Пульт управління моделлю
- Висновки
- Перелік джерел
1. Вступ
Ні для кого не секрет що людині властиво робити помилки, а також відволікатися. Все це можливо в процесі управління автомобілем. Але якщо людина помилилася при написанні тексту, то це швидше за все буде коштувати кілька хвилин що б виправити помилку. Але от якщо помилку допустити при управлінні автомобілем, тоді можливості на її виправлення може і не бути. У такій ситуації на допомогу приходять електронні помічники, встановлені в автомобілі, які безустанно стежать за безліччю датчиків і показань що б у разі помилки або екстреної ситуації на дорозі взяти керування на себе і врятувати ситуацію.
1. Актуальність теми
З кожним роком кількість автомобілів на дорогах тільки зростає, а з ним разом зростає і ймовірність ДТП. Для забезпечення безпеки учасників дорожнього руху було створено безліч систем допомоги водієві. Але просто створити систему і відразу встановлювати її в повно розмірний автомобіль не раціонально. Для початку необхідні тести на менших моделях, де можна все швидко поміняти, змінити конфігурації і інші різні параметри. Якраз для таких цілей і необхідна тестова платформа.
2. Мета і завдання дослідження
Метою магістерської роботи є створення моделі радіокерованого автомобіля а так само систему його стабілізації.
Основні завдання дослідження:
- Вибір мікроконтролера;
- Вибір апаратної частини робота;
- Складання програми стабілізації моделі;
- Аналіз отриманих результатів.
3. Огляд існуючих систем стабілізації
Всі засоби безпеки сучасного автомобіля можна розділити на пасивні (Ремені і подушки безпеки, підголівники і т.д.) і активні (ABS, ESP та інші). Головне завдання активних систем безпеки – допомогти водієві уникнути можливої аварії, тобто не допустити спрацьовування засобів пасивної безпеки.
Першою активною системою безпеки в автомобілі стала антиблокувальна система гальм ABS (Anti–lock Brake System). ABS запобігає блокуванню коліс в момент різкого гальмування, і зберігає керованість автомобіля. Тобто система дозволяє при екстреному гальмуванні об'їхати перешкоду, що при заблокованих колесах буде неможливо.
За допомогою декількох датчиків встановлених на колесах, ABS відчуває момент блокування і бере керування гальмами на себе. Роботу ABS можна відчути по вібрації педалі гальма, головне при цьому пам'ятати, що відпускати педаль не можна. Потрібно, навпаки, сильніше на неї тиснути, щоб гальмування залишалося максимально ефективним.
Для більш ефективної роботи ABS до неї додали систему електронного розподілу гальмівного зусилля EBD (Electronic Brake Distribution). EBD забезпечує рівномірний розподіл гальмівного зусилля між всіма чотирма колесами. Система дає можливість кожному з коліс отримати оптимальне зчеплення з дорогою. Це дозволяє автомобілю залишатися більш стійким при різкому гальмуванні.
Ефективність екстреного гальмування дуже залежить від сили натискання на педаль гальма. Щоб допомогти водієві в аварійній ситуації різко загальмувати до ABS додався ще один помічник - система допомоги при екстреному гальмуванні BA (Brake Assist).
BA вступає в роботу, якщо водій натискає на педаль гальма різко, але недостатньо сильно.
Багато аварії відбуваються через те, що водій не встигає вчасно натиснути на гальмо і втрачає контроль над машиною. Щоб підстрахувати водія від неправильних дій виробники почали створювати системи, які самостійно визначають складну ситуацію і миттєво намагаються стабілізувати автомобіль. В першу чергу мова йде про антіпробуксовочой системі ASR і системі курсової стійкості ESP.
Антипробуксовочная система ASR (Anti–Slip Regulation), вона ж TRC (Traction control), створена для запобігання пробуксовки ведучих коліс.
За допомогою датчиків ABS система відчуває пробуксовку коліс і знижує обороти двигуна, а при необхідності пригальмовує потрібні колеса. Тобто, як би сильно водій не тиснув на газ ефектною пробуксовці йому домогтися не вдасться.
Але іноді робота системи може не дати автомобілю рушити з місця. Наприклад, при старті з дуже слизького ділянки (лід, сніг) колеса миттєво зриваються в пробуксовку і ASR змушена їх гальмувати, при цьому не дозволяючи машині рушити з місця. Щоб уникнути такої ситуації в автомобілі має бути присутня кнопка відключення системи.
Найбільш досконалою активною системою безпеки автомобіля вважається система курсової стійкості ESP (Electronic Stability Program).
Об'єднуючи в своїй роботі можливості всіх попередніх систем, ESP може не тільки виправляти, але передбачати виникнення небезпечної ситуації. Для цього система використовує ще й цілий ряд своїх датчиків. Основні з них це датчик швидкості обертання коліс, положення керма, кутової швидкості та поперечного прискорення.
Система вступає в дію, коли з'являтися небезпека виникнення заносу (знесення) і втрати контролю над автомобілем. Постійно контролюючи всі свої датчики, ESP за 20 мілісекунд визначає, які колеса потрібно пригальмувати і наскільки необхідно знизити обороти двигуна для стабілізації руху автомобіля.
Щоб водієві було простіше зберегти контроль над машиною найсучасніші системи стабілізації, ще й допомагають повернути кермо в потрібну сторону. Втручаючись в роботу підсилювача рульового управління, «просунуте» ESP дозволяє обертати кермо в потрібну їй бік набагато легше, ніж в не потрібну.
Система курсової стійкості з'явилася на автомобілі вже більше десяти років тому і за цей час не раз оновлювалася, удосконалилася і доповнювалася. Кожен виробник по–своєму намагався її поліпшити, давав їй свою назву, міняючи місцями літери в абревіатурі. Але до сих пір ніхто не зміг придумати активну систему безпеки здатну перевершити ESP [ 1 ].
4. Вибір апаратної частини
Для тестування і налагодження програми в ході магістерської роботи буде використана радіокерована малель, також розроблена в ході магістерської роботи. Модель складається з наступних датчиків і модулів: Знижуючий модуль на мікросхемі MP1584EN, Підвищуючий модуль на мікросхемі XL6009, Радіо модуль NRF24L01 +, Датчик струму на 5A ACS712, L298 Dual H–Bridge драйвер.
4.1 L298 Dual H–Bridge драйвер
L298n є подвійний мостовий драйвер для управління двонаправленими навантаженнями з струмами до 2А і напругою від 4.5 В до 46 В. Мікросхема розроблена для управління реле, соленоїдами, двигунами постійного струму і кроковими двигунами. L298n має TTL сумісні входи. У L298n існує поділ електроживлення для логічної схеми і для навантаження, що дозволяє підключити навантаження з меншим або більшим напругою живлення, ніж у мікросхеми, а також зменшує перешкоди.
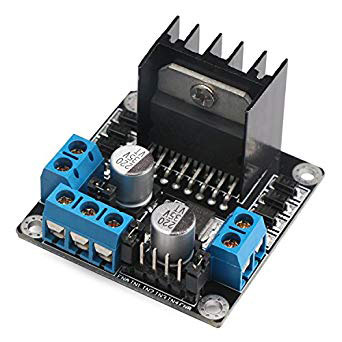
Рисунок 1 – Подвійний мостовий драйвер L298n
Мікросхеми L298n мають вбудований захист від перегріву. Виходи мікросхеми відключаються при нагріванні до температури близько + 70 ° С [2].
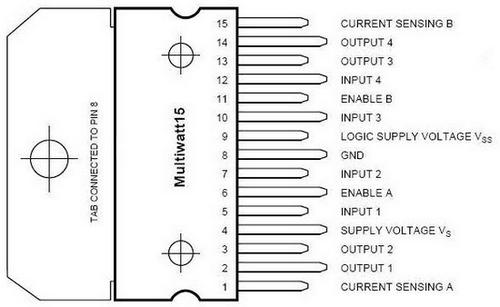
Рисунок 2 – Розташування виводів драйвера L298n
| 1 | SENS-A | Контроль струму 1 і 2 каналів |
|---|---|---|
| 2 | OUT2 | Вихід 2 каналу |
| 3 | OUT3 | Вихід 3 каналу |
| 4 | Vs | живлення навантаження |
| 5 | IN1 | Вхід 1 каналу |
| 6 | EN-A | Дозвіл роботи 1 і 2 каналу |
| 7 | IN2 | Вхід 2 каналу |
| 8 | GND | Загальний вивід |
| 9 | Vss | живлення логіки (+5V) |
| 10 | IN3 | Вхід 3 каналу |
| 11 | EN-B | Дозвіл роботи 3 і 4 канали |
| 12 | IN4 | Вхід 4 канали |
| 13 | OUT3 | Вихід 3 каналу |
| 14 | OUT4 | Вихід 4 канали |
| 15 | SENS-B | Контроль струму 3 і 4 каналів |
| Максимальна напруга живлення Vs | 50V |
|---|---|
| Максимальна напруга живлення Vss | 7V |
| Вхідна напруга (IN, EN) | -0,3...7V |
| Напруга на входах SENS | -1V...+2,3V |
| Максимальний постійний вихідний струм | ± 2A |
| Максимальний імпульсний вихідний струм (5ms одноразово) | ± 3A |
| Максимальна потужність, що розсіюється | 25W |
| діапазон температур | -25...+130°C |
Драйвер вже дуже застарів. Драйвер боботает на застарілих біполярних транзисторах, які у відкритому стані мають досить великий опір. Як наслідок драйвер не витримує навантаження понад 2А при значних розмірах, а також завжди необхідний радіатор для відведення тепла.
4.2 Понижуючий модуль на мікросхемі MP1584EN
Даний модуль є простим імпульсний понижуючий перетворювач постійної напруги на мікросхемі MP1584EN [ 3 ]. Модуль має низький рівень шуму, а це дуже важливо, так як він видає харчування на мікроконтролер і радіомодуль, які дуже вимогливі до стабільного живлення.
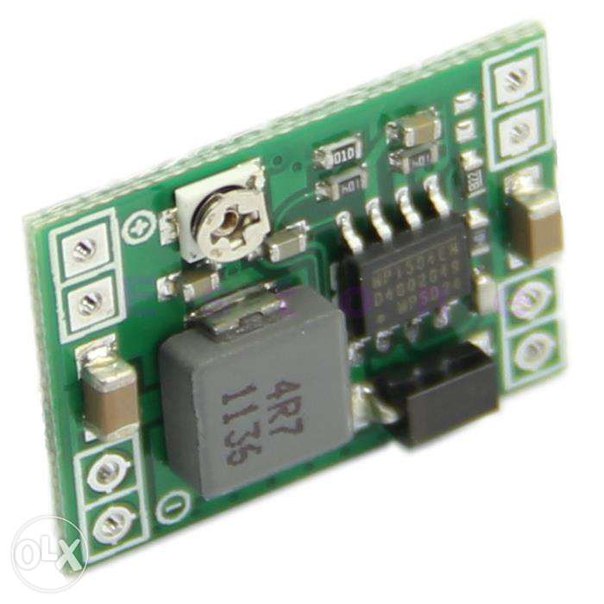
Рисунок 3 – Понижуючий модуль на мікросхемі MP1584EN
Для настройки вихідного напруги модуль має вбудований потенцеометр.
характеристики стабілізатора:
- Вхідна напруга: від 4.5В до 28В;
- Вихідна напруга: від 0.8В до 24В;
- Максимальний вихідний струм: 3А;
У нашому випадку вихідний струм модуля не превишеает 300мА, так що можна сміливо використовувати його без радіатора, перегріву точно не буде.
4.3 Підвищуєчий модуль на мікросхемі XL6009
Модуль являє собою імпульсний Підвищуєчий перетворювач постійної напруги виконаний на мікросхемі XL6009 [ 4 ]. Мікросхема досить розповсюджена для виготовлення перетворювачів і вже перевірена часом.

Рисунок 4 – Підвищуєчий модуль на мікросхемі XL6009
Характеристики:
- Вхідна напруга: від 3.5В до 32В;
- Вихідна напруга: від 6В до 35В;
- Максимальний вхідний струм: 4А;
У хоті тестів даного перобразователя в нашому режимі ратоти з'ясувалося, що преобрахователь має істотний нагрів дроселя а так само мікросхеми. Для відводу тепла і більш безпечної роботи перетворювача в подальшому потрібно передбачити радіатор для відведення тепла або можливо примусове обдування.
4.4 Радіомодуль NRF24L01+
Радіомодуль для зв'язку мікроконтролерів між собою. Працює на частоті 2.4ГГц [ 5 ] (яка не потребує дозволів частота, яка так само використовується для WiFi), швидкість до 2Мбіт, управляється по інтерфейсу SPI, харчування 3.3В (можна використовувати висновок 3.3В плати Arduino). Істотно дешевше xbee модуля, добре підходить для промислових систем управління. Радіус дії – на открийтой місцевості до 100м, в межах квартири, через дві стіни працює впевнено, через три – бувають втрати сигналу.
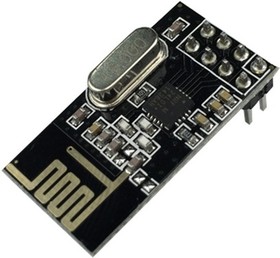
Рисунок 5 – Радіомодуль NRF24L01+
Характеристики:
- Швидкість до 2Мбіт (настроюється 2, 1, 0,25 Мб / с;
- 126 каналів зв'язку, підключення один до багатьох, стрибкоподібне перебудова частоти;
- Апаратний контроль помилок, контроль адресації многоточечной зв'язку;
- Низький рівень споживання енергії: 1.9–3.6В, 1мкА в режимі Power down;
- Модуляція GFSK;
- Вбудована 2.4ГГц антена;
4.5 Датчик струму на 5A ACS712
Датчик постійного струму ACS712 [ 6 ] на ефекті Холла дозволяє постаточно просто інтегрувати його в схему і почати вимірювання струму. Датчик повністю готовий до роботи в мікро контролером і не вимагає додаткових компонентів. Все що потрібно – це наявність аналогового входу на мікроконтролері.
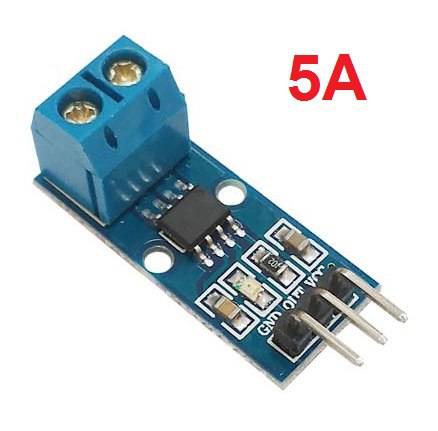
Рисунок 6 – Датчик струму на 5A ACS712
Характеристики:
- Діапазон вимірювання струму: до 5А;
- чутливість: 185 мВ / А;
- максимальна смуга пропускання становить: 80 кГц;
- напруга живлення датчика: 5В;
Так як в нашій моделі имееться 3 електромотора які створюють навколо себе магнітне поле, а датчик струму заснований на ефекті Холла, необхідно розмістити датчики якнайдалі від джерела таких сильних перешкод.
5. Тестовий зразок моделі
Основою розроблюваного робота є отладочная Arduino Nano [ 7 ] (ATmega328P) [ 8 ]. На платформі можна помітити 3 двигуна постійного струму, два з яких приводять в рух модель і один на управління рульовим механізмом. У передній частині встановлена отладочная плата і радіомодуль. Також драйвер для управління двигуном повороту рульових коліс. У задній частині розташований драйвер L298, який управляє двома тяговими двигунами, а також встановлені датчики струму для вимірювання велечіни струму що протікає в кожному двигуні. Ще в задній частині моделі встановлені два підвищують модуля необхідних для підвищення напруги, що подається на тягові дігателя. Модулі встановлені один-одному в паралель для увелечения максимального вхідного струму, а також зменшення нагрівання кожного їх модулів. У центрі встановлена ??аккамуляторной баттарея, що складається з трьох Li-ion [ 9 ] аккамуляторов типорозміру 18650 підключених послеедовательно для підвищення напруги, а так же плати заряду–захисту.
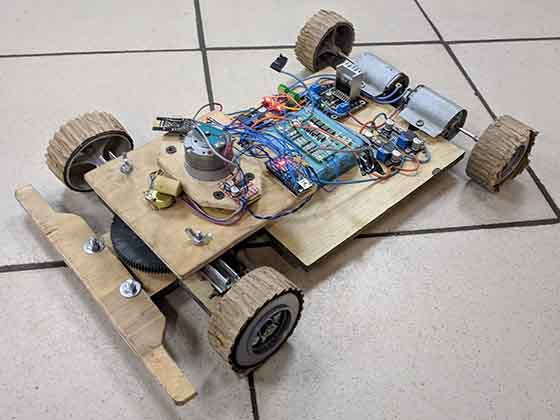
Рисунок 7 – Приблизний вигляд моделі
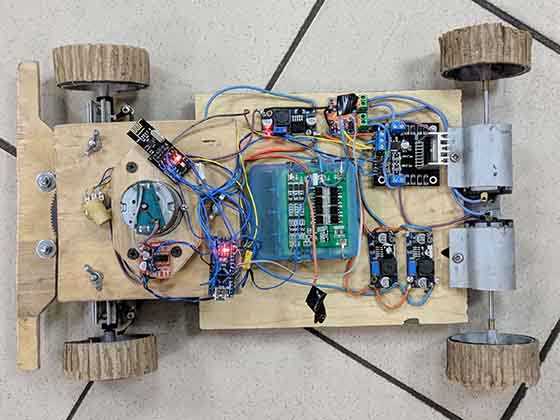
Рисунок 8 – Вид моделі зверху

Рисунок 9 – Демонстрація роботи рульового механізму
(анімація: 9 кадрів, нескінченний цикл повторення, 73 кілобайт)
6. Пульт управління моделлю
Для чіткого і тактильного управлінням моделлю був розроблений і виконаний пульт куркового типу. Пульт дозволяє легко і зручно дозувати тягу і напрямок руху. Завдяки своїй конструкції управління моделлю відбувається інтуїтивно і не вимагає багато часу для звикання.
Пульт працює на точно такий же зв'язці кантроллер - радіомодуль як і модель. Це все та ж Arduino Nano і NRF24L01 +. Так само на пульт додатково встановлено не великий Oled дисплей. Дисплей дозволяє виводити різноманітні дані на пульт, такі як дані заряду акумуляторів моделі і пульта, дані вимірювання струму двигунів, якість сигналу і будь–які інші дані які тільки потребуються. На даний момент виводяться дані заряду акумуляторів моделі і пульта, а так само не оброблене значення струму двигунів.
Органами управління моделлю служать рульове колесо і натискний курок. Дані органи безпосередньо впливають на потенцеометр 10К, який в свою чергу змінює напряжеіе на аналаговий вході мікроконтролера. Для повернення в нульову точку передбачені пружинні механізми для обох органів. Надалі має сенс замінити потенцеометри на який-небудь безконтактний датчик положення, наприклад датчик хола або оптичний датчик.
Для тривалої роботи пульта від однієї заряддкі було встановлене дві li-ion батареї формфактору 18650 з'єднаних паралельно для збільшення загальної ємності. Для захисту і правильної зарядки акумуляторів встановлена плата захисту від перезаряду і переразряда аккамуляторов. Так само пульт має малопотужний підвищує модуль. Він необхідний для підтримки постійної напруги на мікроконтролері і не допуканія зниження напруги харчування мікороконтроллера нижче допустимої межі.

Рисунок 10 – Пульт управління моделлю
У дальнейщем плніруеться спроектувати ергономічний корпус для пульта і виготовити його з допомогти 3Д друку.
Висновки
На основі проведеної роботи планується:
- Установка енкодерів на кожне колесо.
- Установка датчика MPU9250 для точного орієнтування в просторі.
- Доопрацювання програми стабілізації.
- Доопрацювання механічсекой частини моделі і пульта.
На момент написання даного реферату магістерська робота ще не завершена. Орієнтовна дата завершення магістерської роботи: червень 2018 року. Повний текст роботи та матеріали по темі можуть бути отримані у автора або його керівника після зазначеної дати.
Список источников
- Невидимые помощники водителя // rikauto.com.ua [Електронний ресурс]. - Режим доступу: https://rikauto.com.ua/..., свободный.
- Dual full-bridge drive L298N // tech.dmu.ac.uk [Електронний ресурс]. - Режим доступу: http://www.tech.dmu.ac.uk/..., свободный.
- MP1584 - Monolithic Power Systems // monolithicpower.com/ [Електронний ресурс]. - Режим доступу: https://www.monolithicpower.com/..., свободный.
- XL6009 Inverting DC/DC Converter // haoyuelectronics.com [Електронний ресурс]. - Режим доступу: http://www.haoyuelectronics.com/..., свободный.
- NRF24L01, Радиомодуль 2.4ГГц // chipdip.ru [Електронний ресурс]. - Режим доступу: https://www.chipdip.ru/product/nrf24l01, свободный.
- ACS712 Hall Effect-Based Linear Current Sensor // sparkfun.com [Електронний ресурс]. - Режим доступу: https://www.sparkfun.com/..., свободный.
- Отладочная плата Arduino nano // amperka.ru [Електронний ресурс]. - Режим доступу: http://wiki.amperka.ru/..., свободный.
- High-performance Microchip picoPower 8-bit AVR // microchip.com [Електронний ресурс]. - Режим доступу: https://www.microchip.com/..., свободный.
- LI-ION аккумулятор типа 18650 // aliexpress.com [Електронний ресурс]. - Режим доступу: https://ru.aliexpress.com/..., свободный.