Аннотация
Мирошник Д.Н., Свиридов Д.П. Разработка радиоуправляемой модели электромобиля. В работе представлена разработанная модель электромобиля. В основе его работы задействована отладочная плата Arduino Nano. Радио передача данных производиться при помочь радиомодуля NRF24L01+ установленного как на модели, так и на пульте управления. Получая команды поступающие с пульта управления электромобиль осуществляет движение в нужном направлении.
Сегодня открыта проблема автопилотов электромобилей, а так же помощников в управлении. Для разработки таких сложных систем не целесообразно использовать полномасштабный электромобиль, по этой причине и разрабатываеться модель электромобиля с помочью которой можно будет проверить работоспособность, а так же отладить разработанный алгоритм, целую систему помощников в управлении электромобилем или полноценный автопилот.
Одной из основных частей модели электромобиля является электропривод. Данному вопросу было уделено достаточно времени на поиски подходящего по парпметрам решения. В конечном итоге было выбрано два двигателя постоянного тока с номинальным напряжением 24В. Данные двигатели в настоящий момент используються в кофварках фирмы Saeco и Philips. В кофеварке мотор вращает редуктор заварного устройства и испытывет при этом значительную нагрузку. По примерным подсчетам в пиковой нагузке двигатель потребляет 3А при 33В, что положительно скажеться на модели. Двигатели будут вращать оба задних колеса независимо, таким образом давая больше возможностей бля управления. Также определяющим фактором выбора данного типа привода стало использлвание более простого и доступного драйвера. Однозначно, современные бесколлекторные моторы гараздо лучше практически по всем параметрам, но все это за счет значительной цены.
За согласование всех узлов модели, за передачу и прием данных с пульта и обратно будет отвечать отладочная плата Arduino Nano (рис.1). Плата несет на себе восьмибитный микроконтроллер ATmega 368 которого для начальных задач будет более чем достаточно. В дальнейшем планируеться заменить контроллер на STM32F103C8 с целью увеличения скорости работы. Платформа Arduino выбранна в связи с тем, что она не требует большого количеств времени на реализацию и проверку алгоритма. Ведь основная ценль модели будет именно проверка работоспособности алгоритмов и их отладка, а именно для этих целей отлично подходит данная платформа. Также благодаря данной платформе можно с легкостью подключить к микроконтроллеру дополнительное оборудование затратив при этом минимум времени.
Рис. 1 – Arduino Nano
Ниже приведена принципиальная схема (рис.2) соединения отладочной платы с перефирией в виде двух драйверов L298, моторов, радиомодуля NRF24L01+, источника питания и потенцеометра. Потенцеометр в данном случае будет использован в качестве датчика положения рулевого органа. Его показания будут использованы для формирования обратной связи по положению для рулевого механизма. Такой вариант выбран для более гибкого управления моделью. Обратная связь позволяет имень понимание того в каком положении в данный момент находиться рулевой механизм. В теории, при использовании такой схемы с пропорциональным регулятором положения возможно высчитать нагрузку на сам механиз в данный момент исходя из данных ошибки положения и задания на исполнительный механизм.
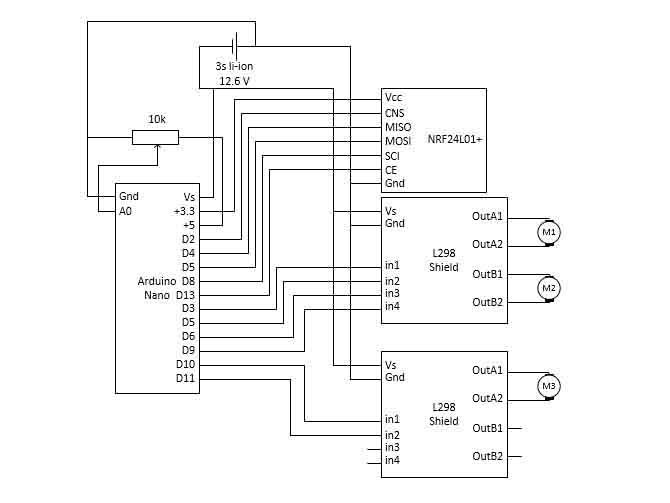
Рис. 2 – принципиальная схема модели
Для питания модели используется комплект из трех последовательно соедененных Li-ion аккамулятора формата 18650. Данный тип аккамулятора превосходит как по удельной емкости так и по токоотдаче никель-кадмиевые акаамуляторы, однако первым необходима защита от переразряда и перезаряда, в противном случае они могут легко выйти из строя.
Управлление моделью будет производиться через дистанционный пульт управления по радиоканалу 2.4 Ггц. Принципиальная схема пульта управления приведена ниже (рис. 3). На схеме видно все соединения отладочной платы с переферией. Подключение модуля NRF24L01+ не отличается от подключения этого же модуля в модели. Так же можно заметить два потенцеометра подключенных к аналоговым входам платы. Потенцеометры выполняют роль органов управления. К примеру один может быть педалью движения вперед и назад, а второй давать задание на рулевой механизм.
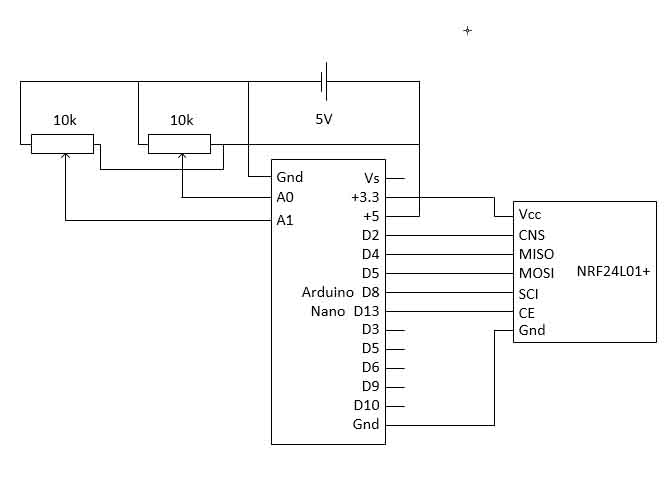
Рис. 4 – Принципиальная схема пульта управления
Таком образом разработанная модель электромобиля является платформой для дальнейших разработок, что очень необходимо для разработки будующих систем автоматического уаправления электромобилем.
Литература
- А.А. Андраханов Автономные мобильные роботы: современные разработки и методы управления // IX Международная конференция
Кибернетика и высокие технологии XXI века
, Воронеж: Изд-во ВГУ, 2008, Т.2-С. 1141 – 1152.