
Реферат по теме выпускной работы
- Введение
- 1. Цель создания
- 2. Способы управления ДПТ наблюдателя
- 2.1 Наблюдатель с релейной обратной связью
- 2.2 Наблюдатель с ПИ-регулятром в обратной связи
- 2.3 Наблюдатель ЭДС из уравнения равновесия якоря ДПТНВ
- 2.4 Наблюдаемостьпеременых состояния
- 3. Применения наблюдателей в системах управления
- 4. Оценочная плата STM32F4 Discovery с STM32F407
- 5. Реализация наблюдателя в программе Matlab
- Выводы
- Список источников
Введение
На сегодняшний день электропривод стал неотъемлемой частью человеческой жизни. Хоть сам электропривод почти не изменился, способы управления эти электроприводом пошли далеко впереди. Те способы управления которые были в недалеком прошлом, сегодня не могут конкурировать с современными системами управления, которые стали полностью дискретные . Ту точность, которую может дать дискретная система управления на порядок выше той, что предоставляет аналоговая система. Функционал и удобство также играет немаловажную роль. Например система генератор-двигатель (Г-Д) для двигателя постоянного тока(ДПТ) в свое время была основной системой управления электроприводом, но сейчас, в виду смешения приоритетов с легкости и простоты в компактность и энергосбережения она не соответствует сегодняшним требованиям. На смену ей прошла система ТП-Д. Коэффициент полезного действия первого находился в пределах 0.6-0.8, тогда как второго 0.92-0.98. И действительно, зачем переплачивать за электроэнергию?
Система управления асинхронным и синхронным двигателями прошла тот же путь, что и системы управления ДПТ. На данный момент на долю асинхронных двигателей приходится не менее 80% всех электродвигателей, и целесообразней было бы для данной дипломной работы использовать именно его, но ввиду сложности реализации и недостатка опыта, все же было принято решения использовать именно двигатель постоянного тока для реализации системы управления косвенной оценки скорости.
1. Цель создания
Целью создания системы управления электроприводом с косвенной оценкой скорости является усовершенствование текущей системы управлении, реализованной в лаборатории 8.109. Текущая система управления основанная на отладочной плате STM32Discavery в которой реализовано замкнутая система подчиненного регулировании скорости с отрицательной обратной связью по датчику скорости(энкодеру). Основной задачей данной работы является избавится от датчика скорости и реализовать программу, которая будет на оснований показателеля датчика тока, рассчитывать скорость. В реальности не всегда иметься возможность использовать датчик скорости. Причины могут быть крайне разнообразны; высокая цена, малая защищенность от внешних факторов, например влага и пыль, физической невозможностью из-за недостатка места или другими факторами которые не позволят установит датчик скорости на вал. Оставлять же системы без обратной связи тоже нельзя. Тогда на помощь приходит математический аппарат, называемый «наблюдатель».
2. Способы управления ДПТ наблюдателя
Наблюдатель – это математическая модель технического объекта, которая позволяет по известным управляющим воздействиям и некоторым прямо измеряемым переменным состояния оценить значения неизменяемых переменных. В нашем случаи известными переменными будет являться входное напряжение и тока якоря, а неизвестным будет скорость двигателя. Существует много видов наблюдателей, которые сильно различаются по принципу своего построения, работы и методу наблюдения за неизменяемым параметром. Для предварительного анализа будут представлены несколько примеров.
2.1Разомкнуты наблюдатель
Данный тип наблюдателя являеться самым простым в реализации. На вход наблюдателя поступает напряжение обмотки возбуждения двигателя постоянного тока независимого возбуждения, которая система управления прикладывает к ней посредством преобразователя. Далее, разница между входным напряжением и падением напряженя на активном сопротивлении обмотки интегрируеться на индуктивность, и получаеться ток обмотки, а потом по заданной зависимости оцениваем значение kФ.
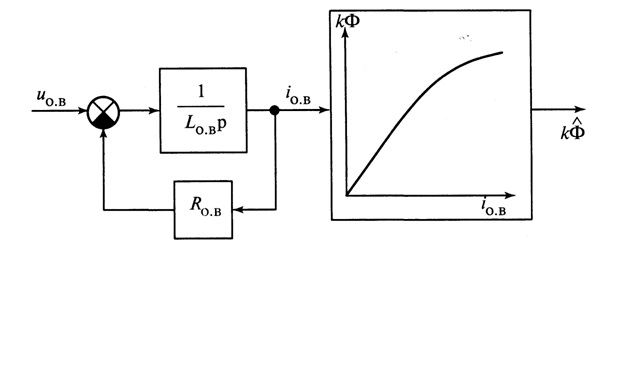
Рисунок 1.1 – Можель протеза на нитевой тяге
Достоинством данного типа наблюдателя является простота реаизациии и минимальное количество измеряемых переменных. Недостатком же является сильная зависимость точности оценки от модели объекта и отсутствие контроля тепловых уходов.
Данный тип наблюдателя не будет реализован поскольку является менее точным, по сравнению с другими, которые буду описаны далее.
2.2 Наблюдатель с релейной обратной связью.
Рассмотрим наблюдатель, который будет оценивать ЭДС двигателя постоянного тока.Структурная схема якоря двигателя представлена в верхней части Наблюдатель, изображенный ниже, будет повторять структуру якоря, однако ЭДС неизвестна. Включим в состав якоря инерционное звено с параметрами якорной цепи, которые должны бытьизвестны с определенной точностью. На входе будет напряжение,прикладываемое к двигателю, которое мы знаем, так как задаем его,а на выходе появляется оценка тока якоря. Сравним измеренный ток якоря и оцененный. Когда к двигателю приложено положительное напряжение питания и его скорость больше нуля, то и ЭДС больше нуля. Предположим, что оценка ЭДС равна нулю. Тогда в наблюдателе напряжение не уравновешивается ЭДС, как в реальном двигателе, а значит, ток на выходе инерционного звена, представляющего собой модель якорной цепи, будет больше измеренного. Это означает, что оцененную ЭДС необходимо увеличить. Воспользуемся релейным элементом для задания ЭДС. Выход релейного элемента должен принимать значения, большее или равное максимальному возможному значению ЭДС и меньшее или равное минимальному возможному значению ЭДС. При таком построении наблюдателя релейный выход ЭДС воздействует на инерционное звено, представляющее собой якорь, и оцененный ток будет стремиться к измеренному значению. В данном конкретном случае релейный элемент, по сути, является релейным регулятором оценки тока. Если теперь отфильтровать релейный?сигнал переключений релейного элемента, то получится значение,приблизительно равное ЭДС, т.е. оценка ЭДС.
На графике зависимости скорости от времени тонкой линиейпредставлена реальная скорость, жирной линией — оценка скорости.Следует учитывать, что при быстром изменении скорости возникаетзапаздывание на фильтрующем элементе. Кроме того, между моментом времени 0,24 и 0,33 с видно, что скорость не наблюдаться. Этопроизошло потому, что ЭДС двигателя превысила уровень максимального напряжения релейного элемента оценки ЭДС — наблюдатель разомкнулся.Чтобы избежать данной проблемы, следует увеличить ограничения релейного элемента. На графике тока от времени тонкой линией изображен переходный процесс в контуре тока, а жирной линией —оценка тока. В верхней части графика хорошо видна работа релейного наблюдателя ЭДС, который, переключая оценку ЭДС между минимальным и максимальным значениями, удерживает оценку тока вблизи измеренного значения.
Фильтрованную оценку ЭДС двигателя можно использовать длявычисления оценки скорости двигателя при известном кФ. Следуетотметить, что данный наблюдатель всегда устойчивый, однако прималом моменте инерции фильтрующий элемент вносит сильнуюзадержку в оценку ЭДС, которая может снижать показатели двухконтурной системы регулирования, замкнутой по этой оценке. В этомслучае контур регулирования скорости следует делать достаточномедленным, чтобы избежать колебательности.
2.3 Наблюдатель ЭДС из уравнения равновесия якоря ДПТНВ.
Если для одной точки провести расчет регулятора несколько раз, то получится точное значение ЭДС для измеренных величин и известныхпараметров модели объекта. Данный результат можно получить,решая дифференциальное уравнение равновесия якорной цепи В этом уравнении кроме параметров двигателя известны напряжение якоря и текущее значение тока якоря. Для вычисления производной тока якоря во времени можно воспользоваться выражением
Данный наблюдатель наиболее быстро оценивает ЭДС. Хотя данная форма имеет операцию дифференцирования, что неизбежнобудет приводить к дрожанию сигнала оценки ЭДС из-за шума в измерении тока, но сам результат представляет собой то значение,к которому стремятся релейный наблюдатель и наблюдатель с ПИ регулятором. Для уменьшения дрожания оценки ЭДС можно применятьфильтр, который будет иметь меньшую постоянную времени, чем фильтр для релейного наблюдателя.
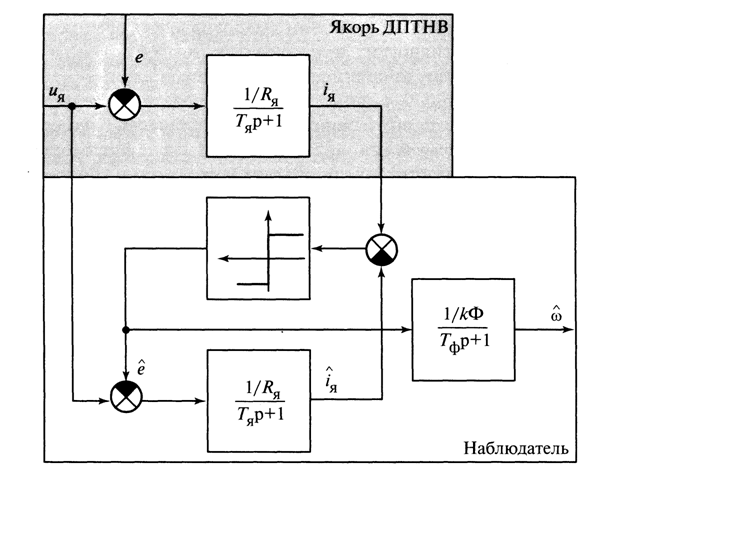
Рисунок 2.1 – Трёхменый вид модели
2.4 Наблюдатель с ПИ-регулятором в обратной связи.
Чтобы избежать использования фильтра, можно вместо релейного элемента использовать ПИ-регулятор оцениваемого тока. Тогдаможно получить значительно более точное приближение к реальному значению с меньшим запаздыванием во времени. Так как ПИ-регулятор охватывает только инерционное звено (якорную цепь), то он?устойчив в широком диапазоне изменения параметров. Кроме того,?для каждой точки его расчет можно проводить многократно, итерационно приближаясь к точному значению. Однако в этом случае?выход регулятора будет содержать помехи от шума в измерении тока,?что приведет к сильному дрожанию выходного сигнала наблюдателя,?поэтому не самая быстрая настройка регулятора позволяет ему быть?одновременно фильтром. Для достижения требуемого качества фильтрации и скорости работы наблюдателя параметры регулятора следует?настраивать эмпирически. Переходный процесс на рис. 4.24 содержит графики изменения?реальной скорости во времени (сплошная линия) и наблюдаемой скорости (штрихованная линия). По увеличенному участку графика?видно, что эти две кривые значительно ближе друг к другу, чем ана¬?логичные в системе с релейным наблюдателем.
Последние два типа наблюдателя будут реализованы в системе управления двигателем постоянного тока
2.5.Наблюдаемость переменных состояния.
Применение наблюдателей тесно связано с термином наблюдаемости. «Наблюдаемость» —возможность оценить значение переменной состояния по поведениюсистемы. Наблюдатели предназначены для уменьшения количествадатчиков и оценки переменных состояния по изменению или значениям других переменных состояния, но для этого должны быть?созданы условия, обеспечивающие связь между измеряемыми переменными и наблюдаемыми. Приведем простой пример. Пусть электропривод вращается с постоянной заданной угловой скоростью.?Наблюдатель должен осуществлять оценку момента инерции электропривода. Механическая часть системы описывается уравнением. Так как скорость постоянна по условию задачи, то определить момент инерции не представляется возможным,?т.е. наблюдаемость момента инерции механизма появляется лишь?в том случае, если механизм изменяет скорость.
3. Применение наблюдателей в системах управления.
Разработанный выше наблюдатель ЭДС можно использовать для оценки скорости электропривода в двухконтурной системе подчиненного регулирования. В этой структуре регуляторскорости замкнут по оцененной переменной состояния, что приводитк запаздыванию в канале измерения скорости.
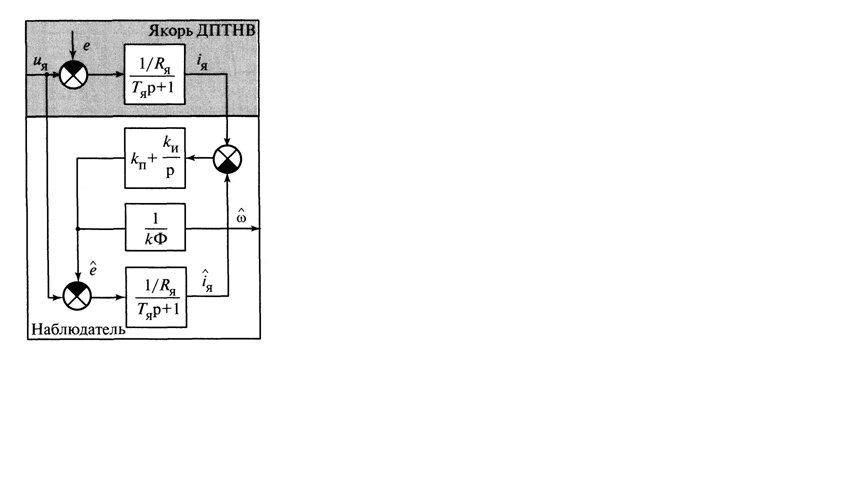
Рисунок 3.1 – Структура получения микроконтроллером сигналов с мышц
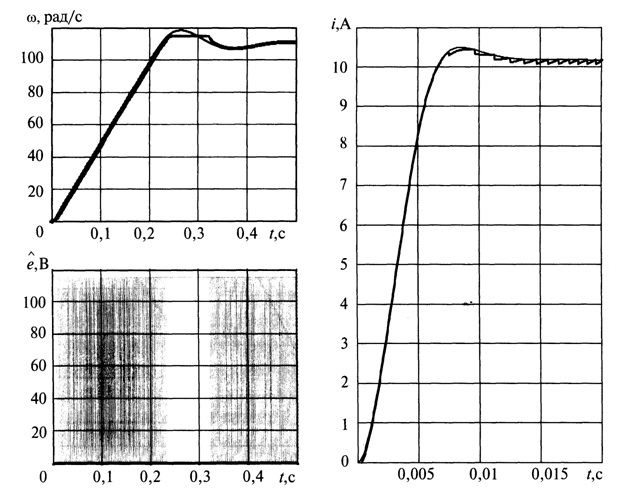
Рисунок 3.2 – Датчик изгиба на световом эффекте
4. Оценочная плата STM32F4 Discovery с STM32F407
Система управления электроприводом реализована на базе платы STM32F4DISCOVERY (рис. 2.9) и пакета MATLAB (приложений Simulink и Waijung Blockset).
Рассмотрим его механическую конструкцию. На рисунке 4.1 представлена модель пальца и крепежа с электроприводом одной части кисти и собранная кисть из этих элементов. Она реализована с помощью 3Д. Материалом для создания послужил ABC пластик, он лёгкий и достаточно прочный для наших задач.
STM32F4DISCOVERY - это отладочная плата, в основе которой лежит микроконтроллер STM32F407VGT6 с ядром ARM Cortex-M4 и максимальной тактовой частотой 168 МГц, что позволяет использовать его в цифровой обработке сигналов и других приложениях, где необходимо максимальное быстродействие [6]. На плате присутствует отладчик, два ST MEMS чипа – цифровые микрофон и трехосевой акселерометр. Чип аудио ЦАП с усилителем класса D. Также присутствуют кнопки сброса и пользовательских функций. Помимо mini-USB для отладки, есть еще и micro-USB с поддержкой OTG. Помимо этого по бокам платы расположены 2 гребенки контактов с шагом 2.54 мм на которые выведены функциональные пины микроконтроллера. Наличие пользовательских светодиодов в количестве 4 штук. Интерфейс отладчика можно переключить с чипа на плате на внешний микроконтроллер.
Состав компонентов платы:
- • Микроконтроллер STM32F407VGT6 с частотой 168Мгц на 32-битном ядре ARM Cortex-M4F, 1Мб флэш-памяти, 192 Кб оперативной памяти в корпусе LQFP100.
- Данная рука используется как прототип для создания человекоподобных роботов, систем удаленного управления в труднодоступных местах и агрессивных средах, и протезов.
- • Встроенный ST-LINK/V2 с возможностью использования ST-LINK/V2 как отдельного устройства (с SWD разъемом для программирования и отладки).
- • LIS302DL, ST MEMS датчик движения, 3-осевой акселерометр с цифровым выходом.
- • MP45DT02, ST MEMS датчика звука, всенаправленный цифровой микрофон.
- • CS43L22, аудио ЦАП со встроенным усилителем класса D.
- • Две кнопки (пользовательская и Reset).
- • USB OTG FS и коннектор micro-AB USB Client
- • Штырьки для быстрого соединения с другими устройствами подключенные ко всем выводам LQFP100.
- • Четыре светодиода, LD3 (оранжевый), LD4 (зеленый), LD5 (красный) и LD6 (синий).
Помимо ядра работающего на частоте 168 МГц, выдающего производительность 210 МИВС, есть 7-канальная матричная шина АНВ которая позволяет без простоя коммутировать независимо основные блоки микроконтроллера. Кроме АНВ повысить производительность призваны 16-ти канальный DMA и ART accelerator™. Множество интерфейсов как последовательных (4 SPI, 2 I2s, 2 I2c, 3 USART, 3 UART, 2 USB OTG FS/HS, Ethernet MAC 10/100, SDIO, 2 CAN 2.0b) так и параллельных (Display 8080, CAMER 8-14 bit, GPIO, FSMC). И много других периферийных блоков (таймеров, ADC, DAC и пр.)
5. Реализация наблюдателя в программе Matlab
Была разработана предварительная программа для оценки правильности подбора коэффициентов. К сажелению к даннаой программе не будет графикоф. Данная программа была разработана в пакете MATLAB (приложений Simulink и Waijung Blockset). Програма работает следующим образом:
- 1. Задание, которое передаеться хостом, поступает на задатчик интенсивности, чтобы сгадить скачкообразный сигнал. Для индикации появления сигнала были использованы светодиоды платы.
- 2. Сигнал с задатчика интенсивноси бодаеться на цифро-аналоговый преобразователь, который в свою на вход СИФУ тиристорного преобразователя.
- 3. При помоши Encoder Read определяем реальную скоростьь электропривода, а при помощи наблюдателя «Nabludatel1» и «Nabludatel2» рассчитать программно скорость двигателя для сравнения с эталонным сигналом.
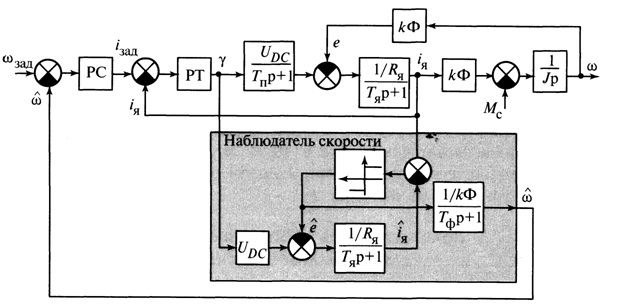
Рисунок 5.1 – Функциональная схема системы управления
Для создания схемы использовались такие блоки как: UART5_target, PWM_Digital, Volatile Data Storage Read, Encoder Read. На блок UART5_target приходит 4 сигнала управления: три коэффициента ПИД регулятора и сигнал задания, который измеряется в градусах. Далее сигнал поступает на ПИД регулятор, где регулируется перемещение. На выходе ПИД регулятора получается сигнал от 0 до 100, что соответствует 0 В и номиналу напряжения. После, блок PWM_Digital создает ШИМ управления, где для управления двигателем необходимо 2 сигнала задания, первый сигнал – ШИМ, который отвечает за «заполненность» сигнала, второй – за направление движения двигателя (вперед, назад). С помощью блока Volatile Data Storage Read идет считывание переменной из буфера task1, который является сигналом задания положения вала двигателя (в градусах). Encoder Read – это блок, с помощью которого считывается угол поворота двигателя, а также он является обратной связью по перемещению и измеряется в градусах.
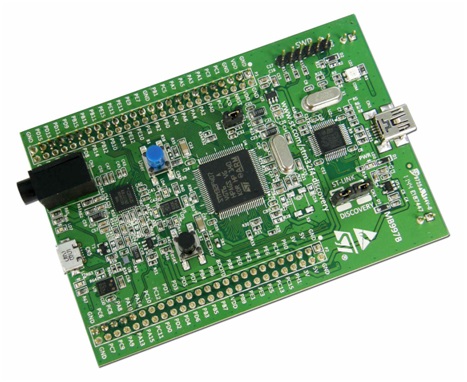
Рисунок 5.2 – Модель для управления электроприводом
Структура является очень простой, и она обеспечивает требуемые характеристики работы. Однако, как можно увидеть из рисунка 8, график показания энкодера имеет перерегулирование в размере 7%, что является плохим результатом и в дальнейшем регулятор будет настраиваться для обеспечения перерегулирования не более чем 1%. Эта погрешность не сильно видна из–за технических особенностей механизма. Были взяты болты общего пользования и гайки к ним, они плохо подогнаны и в соединении которых присутствует зазор, что дает большие люфты в конструкции и неточность движения.
Рисунок 5.3 – Результаты работы модели
Управление положением осуществляется заданием точного значения угла поворота вала двигателя от 0 и до 10800 градусов. Сигнал с него преобразуется, масштабируется и в качестве угла поворота поступает в систему управления. На рисунке 8 изображена отработка положения при задании определённых углов поворота, где график Task1 обозначает задание угла, а Enc – его отработка двигателем. Видно, что положение отрабатывается практически без ошибки, а время отработки сигнала очень мало и равняется 0.03–0.08 с.
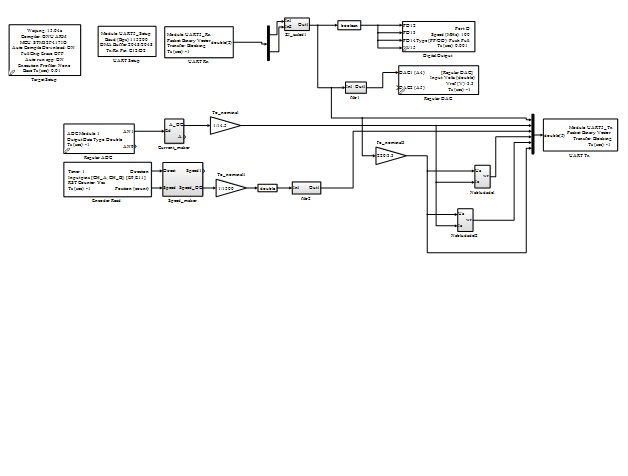
Рисунок 5.3 – Результаты работы модели
Как видно из рисунка 8, в начале задания сигнала Task1, двигатель не может мгновенно отработать сигнал. Для способствования скорейшей отработки ПИД регулятор усиливает коэффициент задания скачком до максимального значения. Это видно по отработке полной составляющей ПИД регулятора – PIDs, интегральная же составляющая повторяет кривую полного сигнала, но уже более сглажено. При приближении положения двигателя к заданию, ПИД регулятор уменьшает коэффициент. Его значение уходи в минус, а затем возрастают из–за того, что сигнал Enc немного переработал или недоработал задание и регулятор старается это исправить.

Рисунок 5.3 – Результаты работы модели
Выводы
- В ходе выполнения данной работы была разработана схема оценки правильности работы наблюдателей
- Данная рука используется как прототип для создания человекоподобных роботов, систем удаленного управления в труднодоступных местах и агрессивных средах, и протезов.
- 2. Были происледованы разные типы наблюдателя и выбраны оптимальные, для данной работы
Список источников
- Усольцев А.А. Общая электротехника: Учебное пособие. – СПб: СПбГУ ИТМО, 2009. – 301 с.
- Теория электродвигателей постоянного тока – электронный ресурс. Режим доступа:
electrikam.com
- Электродвигатель постоянного тока серии ПБСТ – электронный ресурс. Режим доступа:
elektro-dvigateli.ru
- Теория тиристорных преобразователей – электронный ресурс. Режим доступа:
nntu.ru
- Тиристорный преобразователь напряжения БТУ 3601 – электронный ресурс. Режим доступа:
electricalschool.info
- Отладочная плата STM32F4 – электронный ресурс. Режим доступа:
st.com
- Анучин А.С. Системы управления электроприводов: учебник для вузов. – М.: Издательский дом МЭИ, 2015. – 373 с.
- Системы подчиненного регулирования – электронный ресурс. Режим доступа:
ets.ifmo.ru