
РОБОТОТЕХНИКА В ПРОИЗВОДСТВЕ
Сегодня нам трудно представить свою жизнь без роботов и различных автоматических устройств, заменивших человека в самых разных сферах промышленности и повседневной жизни. Несмотря на относительно недолгую историю робототехники, она прочно вошла в нашу жизнь, заменив человека в наиболее опасных условиях работы.
В данной статье кратко приведена история развития автоматизации и робототехники.
Исходной точкой развития промышленной робототехники стал 1947 год. С началом ядерной эпохи в США группой ученных Аргоннской национальной лаборатории, во главе которой стоял Р.Герцем, был создан первый в своем роде автоматический электромеханический манипулятор с копирующим управлением. Данный механизм мог повторять движения человека и работать с опасными радиоактивными материалами. Но у него были существенных недостатки, например, он не имел обратной связи по силе. Однако уже в1948 году компания «General Electric» разработала копирующий манипулятор « Handy Man», в котором такая обратная связь имелась и оператор мог воспринимать силы, воздействующие на захват манипулятора.
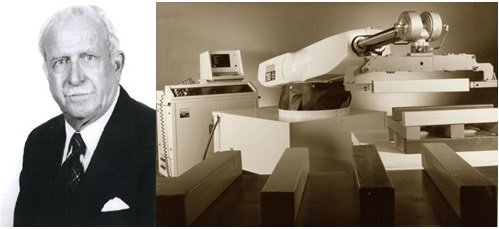
Первые промышленные роботы появились в середине 50-х годов ХХ века в США. Все началось с Дж. Девола (Рис.1) инженера, который разработал способ управления погрузочным манипулятором с помощью перфокарт и подал патентую заявку на сконструированное им «программируемое устройство для переноски предметов». Практически сразу они совместно с Дж. Энгельбергом создали компанию, которая впервые в мире начала выпускать промышленных роботов. Эта компания получила название «Unimation».
В 1959 году фирма «Консолидейтед Корпорейшн» (США) опубликовала описание манипулятора с числовым программным управлением (ЧПУ), а в 1960—1961 гг. в американской печати появились первые сообщения о манипуляторах «Transferrobot» и «Eleximan» с программным управлением для автоматизации сборочных и других работ.
Экспериментальный экземпляр робота «Unimation» был создан в 1959 г., а весной 1961 года этот промышленный робот был введён в эксплуатацию на литейном участке одного из заводов автомобильной корпорации «General Motors», в городе Юинг — пригороде Трентона. Робот захватывал раскалённые отливки дверных ручек и других деталей автомобиля, опускал их в бассейн с охлаждающей жидкостью и устанавливал на конвейер, после чего они поступали к рабочим для обрезки и полировки. Работая 24 часа в сутки, робот заменял три смены рабочих на тяжёлом, грязном и опасном производстве.
Данный робот имел 5 степеней подвижности, имел гидропривод и двухпальцевое захватное устройство с пневмоприводном. Перемещение объектов массой до 12 кг осуществлялось с точностью 1,25 мм. В качестве системы управления использовался программоноситель в виде кулачкового барабана с шаговым двигателем, рассчитаный на 200 команд управления, и кодовые датчики положения. В режиме обучения оператор задавал последовательность точек, через которые должны пройти звенья манипулятора в течение рабочего цикла. Робот запоминал координаты точек и мог автоматически перемещаться от одной точки в другой в заданной последовательности, многократно повторяя рабочий цикл. На операции разгрузки машины для литья под давлением «Unimation» работал с производительностью 135 деталей в час, доля брака составляла 2 %, тогда как производительность ручной разгрузки составляла 108 деталей в час при браке до 20 %.
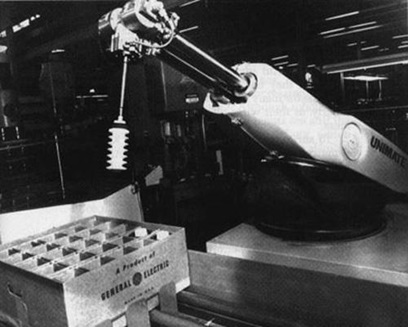
Промышленный робот «Версатран», имевший три степени подвижности, в качестве программоносителя использовал магнитную ленту. Он использовался обжиговой печи и мог загружать и разгружать до 1200 раскалённых кирпичей в час. В то время соотношение затрат на электронику и механику в стоимости робота составляло 75 % и 25 %, поэтому многие задачи управления решались за счёт механики. Сейчас это соотношение составляет 25 % и 75 % соответственно. Массовое использование промышленных роботов в Европе началось в 1967 году. Первый робот «Юнимейт» (Рис.2) был установлен на металлургическом заводе Швеции в городе Уппландс-Весбю. В этом же году в эру робототехники вступила Япония, которая приобрела робота «Версатран».
Вскоре в Японии и Швеции, а также в Великобритании, ФРГ, Италии и Норвегии начался выпуск промышленных роботов собственного производства. В 1968 году компания «Кавасаки Хэви Индастриз» приобрела лицензию у фирмы «Юнимейшн» для производства промышленных роботов и уже в 1970 году Япония вышла на первое место в мире, как по годовому выпуску роботов, так и по числу промышленных роботов, установленных на предприятиях страны.
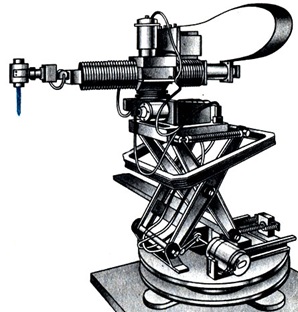
В Советском Союзе промышленные роботы появились в 1971 году, благодаря Николаю Петровичу Белянину и Борису Николаевичу Сурнину, которые создали роботов УМ-1 и «Универсал-50». С 1972 по 1975 гг. в СССР появилась целый спектр промышленных роботов, таких как серия «Универсалов»(Рис.3), ПР-5, «Бриг-10», ИЭС-690, МП-9С, ТУР-10 и др.
С 60 годов в США разрабатывались роботы с системами управления, основанными обратной связи. Первоначально задающие устройства в этих системах формировались на коммутаторной плате; в 1974 г. фирма «Цинциннати Милакрон» впервые применила в системе управления роботом компьютер, создав промышленный робот T3 (The Tomorrow Tool ).
На сегодняшний день машиностроение является самой роботизированной отраслью промышленности. Применение роботов обусловило существенное повышение производительности, получение продукции высокого качества по более низкой цене. Роботу в отличии от человека не требуется хорошее освещение, подержания оптимальной температуры на местах роботы. Также уменьшается производственная площадь, ведь промышленные роботы можно устанавливать как на стене, так и на потолке. Повышается безопасность труда, манипуляторы могут без проблем работать с радиоактивными или химическими опасными материалами, в помещениях с высокой температурой или повышенной запыленностью. Увеличивается качество выпускаемой продукции и уменьшается количество бракованных изделий. Роботу не требуется выходных или перерывов, он спокойно может работать 24 часа в стуки 7 дней в неделю. При правильной эксплуатации затраты на приобретения и обслуживание робота окупаются в течении одного года.
В конструкции робота может присутствовать один или несколько манипуляторов, при этом сам манипулятор может обладать различной грузоподъемностью, точностью позиционирования, количеством степеней свободы. Стоит отметить, что существуют простые механизмы с 2-3 степенями свободы, и сложные - более 6 степеней свободы. Производственные процессы в машиностроении очень разнообразны. Их можно разделить на заготовительные процессы (ковка, литье, штамповка), процессы обработки заготовок (механическая обработка литых, кованых, штампованных деталей), сборку (монтаж, сварка) и завершающую обработку (покраска, упаковка).
Применение роботов позволяет существенно повысить производительность штамповочного производства. Это связано с тем, что время штамповки детали составляет 1-6 секунд, в то время как вспомогательные операции (подача заготовки и ее и удаление) занимают гораздо больше времени. Использование роботов значительно сокращает время на вспомогательные операции. В данной области применяются устройства как с одним или двумя рабочими органами, причем двузхахватные роботы гораздо большее эффективны.
В механообработке роботы выполняет вспомогательную роль. Их назначение заключается в подаче и установке заготовки на станок, а также удаление обработанной детали со станка. Эффективность применения роботов в данной области очевидна - он полностью замещает человека при работе с металлорежущими станками, тем самым снижая вероятность травматизма. Большую роль в машиностроении играют сборочные роботы (Рис.4). Они применяются для сборки различных агрегатов и узлов из отдельных элементов и деталей. Их назначение - монтаж и фиксация деталей.

При сборке очень большое значение имеет точность позиционирования отдельных деталей. Современные роботы обеспечивают точность до 0,05 мм, что во много раз превосходит возможности человеческого глаза. На типичном сборочном механизме установлены несколько роботов, каждый из которых выполняет свою операцию - подача, удерживание, сцепление деталей. Управление процессом производится бортовым компьютером по заданному алгоритму. Робот оснащен датчиками обратной связи, основным из которых является датчик усилия. Современные механизмы могут выполнять разные виды сборки.
В настоящее время рынок промышленной робототехники активно развивается. Спрос на автоматизацию постоянно растет даже среди небольших предприятий. Использование робототехники имеет большой потенциал. Она позволяют минимизировать время производства и увеличить производительность. Также отмечается снижение производственных издержек. Внедрение роботов позволяет сократить штат рабочих. Кроме этого, роботу можно доверить выполнение особо ответственных задач, что позволит избежать ошибок и исключить так называемый «человеческий фактор».
Безусловно, автоматизация производства выгодна производителям. Но процесс массового внедрения передовых технологий идет недостаточно быстро. Возникает вопрос: Что тормозит массовое внедрение автоматизации? Действительно, развитие робототехнической промышленности требует больших инвестиций. Главные мировые компании на сегодняшний день все-таки больше привлекает дешевая рабочая сила, нежели инновационные решения автоматизации. Промышленно развитые страны, такие как Франция, Япония и Германия, размещают свое производство в странах с развивающейся экономикой, например, в Индии или Бразилии. Тем не менее, прогнозы в отношении дальнейшего развития отрасли достаточно благоприятны. Вместе с тем на рынке промышленных роботов активно развивается тенденция производства индивидуальных технологий и систем автоматизации.
В заключении так же нужно отметить, что крупным рынком сбыта робототехники может быть не только промышленность. Было бы несерьезно рассматривать современную робототехнику как модное направление промышленной автоматизации, которое после пика своей популярности станет лишь еще одним инструментом в руках инженера. Потенциально существует много непромышленных направлений роботизации.
В военной промышленности роботы выполняют функции, как действующей силы, так и помощников для военнослужащих. К примеру, роботы для переноски и погрузки тяжелых грузов. А представьте, сколько жизней могут, и спасли, роботы саперы. Ведь им не страшны взрывы, и даже если бомба повредит робота, то его можно восстановить, чего нельзя сказать о человеческой жизни. Уже непродолжительное время в военной индустрии используются дроны в качестве разведчиков и эффективной боевой силы (Рис.5). Весьма длительное время ведется разработка экзоскилетов военного типа, полностью автоматических или полуавтоматической техники.

Такие роботы уже достаточно плотно вошли в жизнь людей. Они постоянно развиваются, на рынки выходят новые виды автоматизированных автономных устройств, к примеру, роботы пылесосы (Рис.6), которые осуществляют уборку дома без вмешательства человека. Стоит отметить, что изначально планировалось, что именно бытовые роботы станут наиболее распространенными, однако это не так. Хотя можно отметить тенденции на увеличение спроса таких устройств.

Роботизация так же не обошла и медицину. Теперь с помощью новейших технологий стала доступна возможность совершать операции которые когда то считались не выполнимыми. Широкой массе стали доступны новейшие разработки в сфере протезирования конечностей.
Подведя итоги можно сказать, что роботизации промышленности это важный шаг в развитии человечества. А также применения роботов в других сферах дает человеку больше возможностей для развития и широкий спектр возможностей в робототехники.
Список источников
- Корызев Ю.Г. «Применение промышленный роботов» / Издательство «Москва» 2015 год.
- Тechno guide www.techno-guide.ru.
- Википедия ru.wikiversity.org .