
Реферат за темою випускної роботи
Зміст
- Aнотація
- 1. Функції моделювання V-Rep
- 2. Об’єкти моделюванняV-Rep
- 3. Обчислювальні модулі
- Висновок
- Джерела
Aнотація
У даній роботі розглядається симулятор промислових роботів V-rep та його можливості, також в статті був проведений аналітичний розрахунок траєкторії руху робота ABB IRB 140 і порівняння з траєкторією, отриманої за допомогою графобудовоча в робосимуляторі V-REP.
У наш час можливості експлуатації роботів приголомшливиї, їх використовують скрізь, починаючи від дослідження космосу і закінчуючи чищенням будинків. Поєднання в роботах трьох підсистем: актуатора, сенсора, та дистанційного керування робить їх надзвичайно ефективними але в той же час дорогими, що в свою чергу не прощає помилок. І тут до нас на допомогу приходять різні програми - симулятори, однією з таких програм є робосимулятор V-REP.
V-REP є середовищем для симулювання (sandbox) різних видів роботів, при цьому користувачу немає необхідності мати фізичний доступ до реальної машині, що економить гроші і час. Середа V-REP надає зручний інтерфейс для візуалізації дій робота в тривимірному віртуальному просторі набагато раніше, ніж реальний прототип робота буде створений [2].
Можлива самостійна збірка симулятора з наведених кінематичних, фізичних і графічних бібліотек, і вирішальне значення, з точки зору продуктивності і точності симуляції, матимуть архітектура і використовувана методології. Надійний системний підхід вимагає використання універсальних і масштабованих стратегій моделювання. Крім того керуючі програми пишуться на простій мові, що надзвичайно зручно [1].
1. Функції моделювання V-Rep
V-REP розроблений на базі універсальної архітектури, і в ньому немає головного або центрального модуля. Замість цього V-REP складається з відносно самостійних функціональних груп, які можуть бути включені або виключені в міру необхідності.
2. Об’єкти моделюванняV-Rep
Симуляційні моделі V-REP містять кілька об’єктів або елементів, які зібрані в деревоподібну ієрархію. Нижче описані сцени моделювання, підтримувані V-REP:
• Зчленування: елементи, які пов’язують два або більше об’єкта сцени разом, забезпечуючи від однієї до трьох ступенів свободи (призматичні, обертальні, гвинтові, або сферичні). Вони можуть працювати в різних режимах (наприклад, в силовому / обертальному режимі, режимі зворотної кінематики та ін.)
• Форми: трикутні полігональні сітки, використовувані для моделювання та візуалізації твердого тіла.
• Безконтактні датчики: Вони обчислюють точне мінімальну відстань до частини фігури, яка знаходиться в межах виявлення. Це дає безперервну і більш реалістичну симуляцію, ніж виявлення на основі великої кількості направлених променів.
• Візуальні датчики: візуальні датчики дозволяють витягати складні зображення і інформацію зі сцен моделювання (кольору, розмір об’єктів, глибина карти і ін.). Вбудована фільтрація і функція обробки зображень запускає цілий блок з фільтруючих елементів. Візуальні датчики використовують апаратне прискорення для отримання RAW зображень (підтримка OpenGL).
• Датчики сили: вони являють собою жорсткі зв’язку між фігурами, які можуть записувати прикладені сили і крутний момент, і які можуть руйнуватися при перевищенні заданого порогу.
• Графіки: графіки можуть записувати велику різноманітність зумовлених або призначених для користувача потоків даних. Потоки даних можуть бути відображені безпосередньо (графік по часу заданого типу даних), або в поєднанні один з одним для відображення X / Y графіків, або 3D кривих.
• Камери: вони дозволяють візуалізувати сцени, які залежать від точки спостереження.
• Освітлення: висвітлюють сцену або окремі об’єкти сцени, і впливають на камери або візуальні датчики.
• Шляхи: вони визначають складний рух в просторі (послідовність вільно поєднуваних перекладів, обертань і / або пауз), і використовуються, наприклад, для направлення зварювального пальника робота вздовж заданої траєкторії, або дозволяють задати рух конвеєрної стрічки.
• Матеріальні точки: це допоміжні системи відліку, які можуть бути використані для різних завдань. В основному використовуються в поєднанні з іншими об’єктами сцени.
• Фрези: можуть бути використані для імітації поверхні ріжучих операцій на форми (наприклад, фрезерування, лазерна різка та ін.)
3. Обчислювальні модулі
Об’єкти моделювання рідко використовуються самостійно, вони швидше працюють спільно з іншими об’єктами (наприклад, датчик наближення виявляє форми). Крім того, V-REP пропонує кілька розрахункових модулів, які можуть безпосередньо працювати на одну або кілька сцен моделювання. Нижче наведені основні розрахункові модулі:
• Модуль кінематики: дозволяє виконувати кінематичні розрахунки (прямі і зворотні) для будь-якого типу механізму (розгалужені, закриті, з резервуванням, що містять вкладені цикли і ін.). Модуль базується на розрахунку найменших згасаючих квадратів.
• Динамічний модуль: дозволяє регулювати динаміку розрахунку твердого тіла і взаємодії (зіткнення, зчіпляння і ін.) За допомогою Bullet Physics Library і Open Dynamics Engine. Симуляції динамічних систем до сих пір знаходяться на початковому етапі і часто ґрунтуються на приблизних показниках. Для підтвердження результатів важливо грунтуватися не тільки на одному фізичному движку.
• Модуль виявлення зіткнень: дозволяє здійснювати швидку перевірку зіткнень між будь-якою формою або набором фігур. Цей модуль є повністю незалежним від відповіді алгоритмів розрахунку динаміки модуля. Використовуються структури даних, заснованих на бінарному дереві прямокутних боксів для прискорення. Додаткова оптимізація досягається за рахунок техніки кешування.
• Модуль розрахунку відстані (Mech-mech модуль): дозволяє швидко мінімізувати відстань розрахунку між будь-якими формами (опуклі, увігнуті, відкриті, закриті і т.д.) або набором форм. Модуль використовує ті ж самі структури даних, що і модуль виявлення зіткнень.
• Модуль планування руху: ручне планування голономних і неголономних завдань за допомогою підходу, заснованого на алгоритмі Rapidly-exploring Random Tree (RRT). Завдання з планування шляхів кінематичних ланцюгів також підтримуються.
Як приклад використання робосімулятора V-REP зробимо аналітичний розрахунок траєкторії руху робота ABB IRB 140 і порівняємо з траєкторією, отриманої за допомогою графопостроителя в робосімуляторе V-REP.

Малюнок 1 – Траєкторія руху робота ABB IRB 140 в робосімуляторе V-REP
Для аналітичного опису траєкторії руху вихідної ланки необхідно визначитися з системою координат ланок маніпулятора. Координатні осі розставлялися методом Денавіта-Хартенберга.
Метод полягає в тому що, кожна система координат формується на основі наступних трьох правил [3]:
1) вісь zi направлена уздовж осі i-го зчленування;
2) вісь xi перпендикулярна осі zi і спрямована від неї;
3) вісь yi доповнює осі xi, zi до правої декартової системи координат.
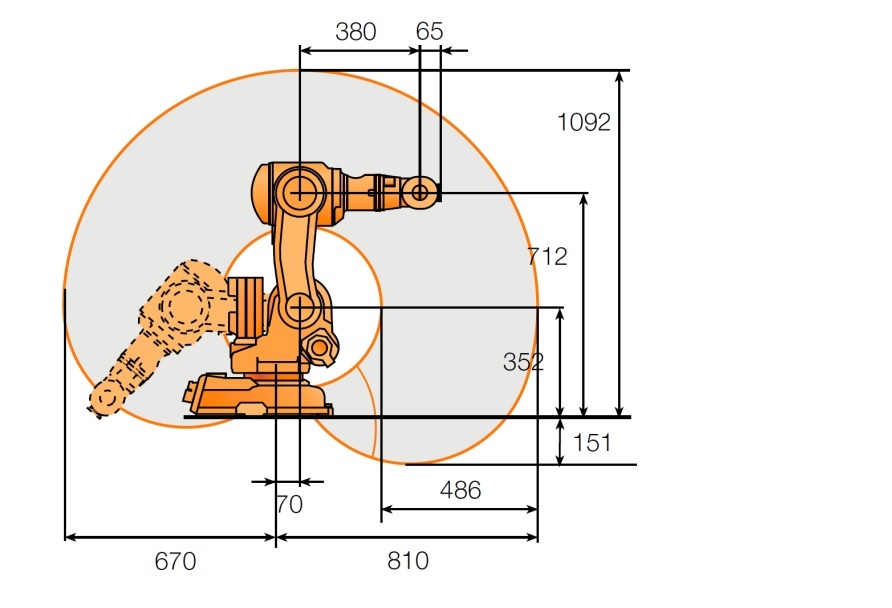
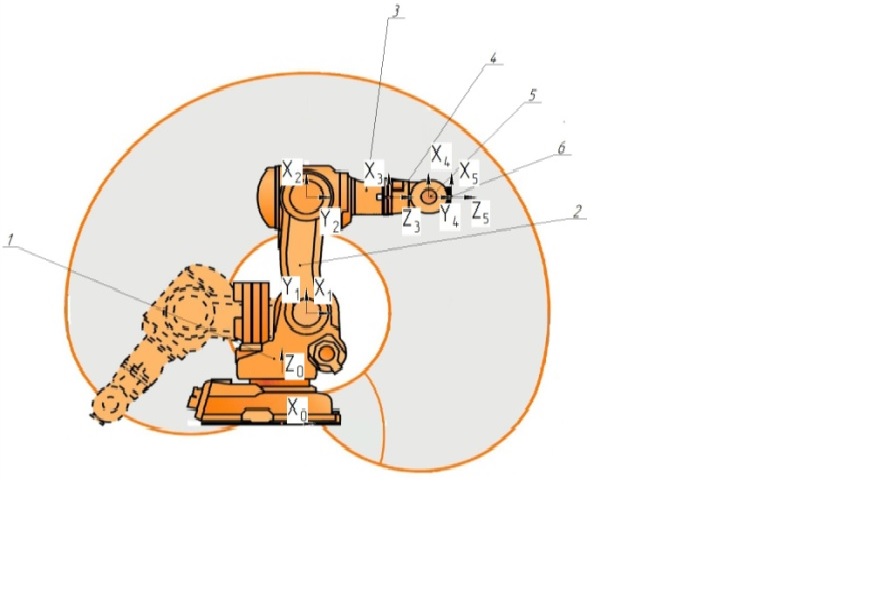
Малюнок 2 – Розміри і система координат ланок робота ABB IRB 140
На малюнку 2 б показані напрямки осей систем координат кожної ланки робота.
Був складен ланцюжок переміщень від нулювої ланки до п’ятої ланки, відносно якої особлива точка нерухома, після чого були складені матриці перетворення координат Денавіта-Хартенберга для кожного переходу (мал. 3) [4, 5] .
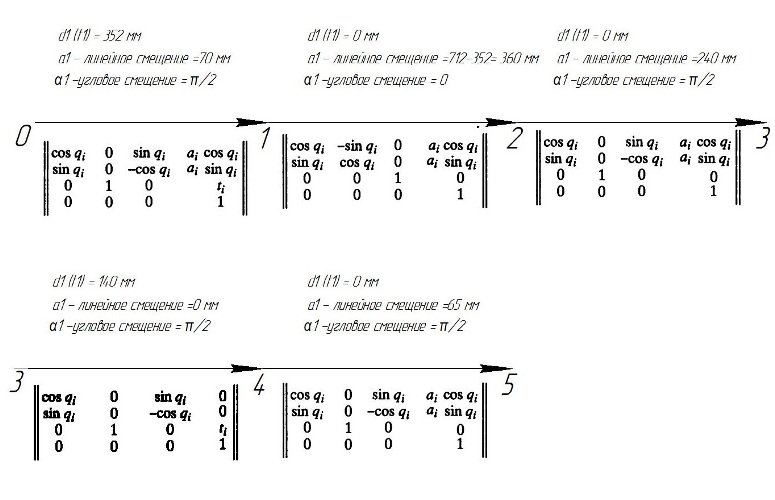
Малюнок 3 – Матриці переходу від ланки до ланки
На мал. 4 представлені результати вирішення прямої задачі про становище маніпулятора з використанням пакета прикладних програм Mathcad.
Порівняння траєкторії руху робота, отриманої розрахунковим способом і за допомогою програми.
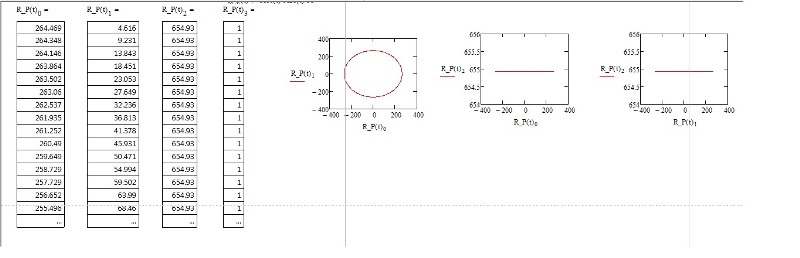
Малюнок 4 – Траєкторії руху робота, отриманої розрахунковим способом
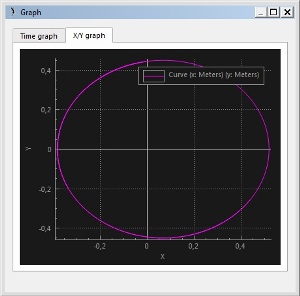
Малюнок 5 – Траєкторії руху робота, отриманої за допомогою програми
З малюнків 4 і 5 бачимо, що траєкторія руху точки схвата в системі координат XY має форму кола, відмінністю є різні числові значення на системах координат, що пояснюється різною метричної системою при обчисленні.
Висновок: V-REP являє собою універсальну і масштабовану середу моделювання. До сьогоднішнього дня V-REP виріс до надійного і широко використання в науковій і промисловій сфері тренажера роботів і контролерів. Він виконує найрізноманітніші завдання: від перевірки системи, оптимізації алгоритмів, моделювання складних складальних ланцюгів в автоматизації виробництв до планування завдань для роботів і контролерів.
V-REP зручний для наочного уявлення рухів робота при вирішенні кінематичних і динамічних задач маніпулятора робота.
Висновки
В ході дослідження було доведено що дана програма є адекватною, що дозволяє використовувати її в подальших дослідженнях.
При написанні даного реферату магістерська робота ще не зроблена. Повний текст роботи та матеріали по темі можуть бути отримані у автора або його керівника.
Джерела
- V-REP – гибкая и масштабируемая платформа для робомоделирования : автор статьи: marc@coppeliarobotics.com - 18 августа 2015, – Режим доступа к журн. : https://habr.com/post/268313/.
- Использование Remote API в робосимуляторе V-REP : автор статьи: Шалыгайло Сергей ar1 - 6 октября 2015, – Режим доступа к журн. : https://habrahabr.ru/post/268313/.
- Представление Денавита–Хартенберга : автор статьи: Studfiles2 - 02.05.2014, - Режим доступа к журн. : https://studfiles.net/preview/985240/page:9/.
- Корендясев А. И. Теоретические основы робототехники: монография : в 2-х кн. / Корендясев А. И., Саламандра Б. Л., Тывес Л. И. ; ред. Каплунов С. М.; Ин-т машиноведения им. Благонравова А. А.. - Москва : Наука, 2006. - . - ISBN 5-02-033952-0. Кн. 1 . - 2006. - 383 с. : ил. - Библиогр. в конце глав. - ISBN 5-02-034439-7.
- Булгаков А. Г. Промышленные роботы: кинематика, динамика, контроль и управление / Булгаков А. Г., Воробьев В. А. - Москва : СОЛОН-Пресс, 2007. - 485 с. : ил., табл.; 22 с. - (Серия "Библиотека инженера").; ISBN 978-5-91359-013-8.
- Учеб. пособие для втузов: В 3 кн. / Под ред. Фролова К. В., Воробьева Е. И.. Кн. 1 : Кинематика и динамика / Воробьев Е. И., Попов С. А., Шевелева Г. И.. – М. : Высш. шк. , 1988. – 304 с.: ил.
- Учеб. пособие для студ. вузов, обучающихся по спец. «Робототехнические системы» / Бурдаков С. Ф., Дьяченко В. А., Тимофеев А. Н. – М. : Высш. шк. , 1986 г. – 264 с.
- Учеб. пособие. – 2-е изд., перераб. и доп. – К.: Выща шк. , 1991 г. –311 с.
- Промышленные роботы в машиностроении: Альбом схем и чертежей: Учеб пособие для технических вузов / Соломенцев Ю. М., Жуков К. П., Павлов Ю. А. и др; Под общ ред Соломенцева Ю. М. – М. : Машиностроение, 1986 – 140 с.
- Костюк В. И., Гавриш А. П., Ямпольский Л. С, Карлов А. Г. Промышленные роботы. Конструирование, управление, эксплуатация. К. : Виша шк. Головное изд-во, 1985 г. – 359 с.