
Реферат за темою випускної роботи
Зміст
- Вступ
- 1. Актуальність теми
- 2. Мета і задачі дослідження та заплановані результати
- 3. Огляд досліджень та розробок
- 3.1 Існуючі методи контролю кавітації в насосних установках
- 3.2 Огляд національних джерел
- 4. Основні результати досліджень та розробки
- Висновки
- Перелік посилань
Вступ
Водовідливні установки шахт є одним з найважливіших об'єктів, автоматизація яких повинна забезпечувати максимальну надійність і ефективність відкачування води з гірських виробок, безпеку ведення гірських робіт з видобутку корисних копалин.
Надійність й ефективність роботи водовідливної установки в автоматичному режимі істотно залежить від ступеня точності та достовірності інформації про поточні технологічні параметри роботи водовідливу, одержуваної з використанням засобів вимірювання або контролю, попередження і виключення розвитку аварійних ситуацій в стані насосних агрегатів, діагностування стану механічного обладнання, технологічного захисту та ін.
1. Актуальність теми
Однією з особливостей функціонування водовідливної установки є мінливість її параметрів і характеристик (продуктивності, напору, ККД і ін.) в процесі експлуатації, що призводить до виходу робочого режиму насоса із зони промислового використання. До анормальних режимів роботи відносять такі режими: розрив напірного трубопроводу, гідравлічний удар, розгерметизація всмоктуючого трубопроводу та ін. В ряді випадків це призводить до зміщення робочої точки в зону непромислового використання насосного агрегату або виникнення кавітаціонного режиму [1]. Наслідками виникаючої в насосі кавітації є інтенсивний гідроабразивний знос робочого колеса насоса і прохідних частин машини, всмоктуючого трубопроводу, а також зрив подачі.
До теперішнього часу в складі діючої апаратури автоматизації водовідливу не виконуються функції контролю витратних характеристик, а також відсутні засоби захисту від виникнення кавітації в насосному агрегаті.
2. Мета і задачі дослідження та заплановані результати
Загальними наслідками для всіх видів витоків і кавітації, є [2]: збільшення витрат електроенергії на водовідливи, зниження ресурсів насосів і трубопроводів, зниження ККД водовідливної установки, різке погіршення експлуатаційних характеристик роботи насосів на водопровідну мережу.
В результаті сукупного впливу ряду факторів і інтенсивного зносу змінюються параметри насосів: подача, напір, к.к.д. і пропускна здатність трубопроводів, що, в свою чергу, веде до додаткових витрат електроенергії на водовідлив.
Для економії електроенергії та ефективної роботи шахтної водовідливної установки системою автоматичного управління повинні виконуватися наступні керуючі функції:
- закриття і відкриття регулюючої заслінки для підтримки робочої точки насосу в зоні промислового використання при незначних витоках і зміни опору гідравлічної мережі;
- регулювання режимів роботи і управління насосним агрегатом в залежності від рівня розвитку кавітації.
Мета проектування - підвищення ефективності роботи шахтної водовідливної установки шляхом розробки пристрою автоматичної діагностики порога кавітації і захисту від анормальних режимів роботи.
Для досягнення поставленої мети необхідно вирішити наступні задачі:
- розробити пристрій контролю ступеня кавітації у всмоктуючому трубопроводі;
- розробити пристрій захисту і систему стабілізації кавитационного запасу насосного агрегату.
Пристрій автоматичного захисту від анормальних режимів роботи водовідливної установки повинен:
- фіксувати поріг настання і ступінь розвитку кавітації;
- забезпечувати незначну інерційність каналу вимірювання і передачі інформації на пульт гірничого диспетчера;
- здійснювати автоматичне регулювання робочої точки насоса в зоні його промислового використання і захист при виникненні анормальних режимів роботи;
- забезпечувати гальванічну розв'язку по каналам живлення вимірювальних перетворювачів і виконавчих механізмів від блоку управління пристрою;
- всі ланцюги пристрою повинні бути іскробезпечними і узгодженими з приводом керуючої заслінки.
3. Огляд досліджень та розробок
Водовідливні установки повинні забезпечувати надійне відкачування води з підземних виробок при найменших експлуатаційних витратах [3]. Відповідно з вимогами ТБ водовідливні установки повинні бути обладнані апаратурою автоматизації. Автоматично діюча апаратура виконує операції замість машиністів насосів, забезпечує точність, безпеку і своєчасність цих операцій. Це дозволяє продовжити міжремонтні терміни за рахунок виключення випадків холостої роботи водовідливу і дає можливість економити значні кошти.
3.1 Апаратура автоматизації шахтних водовідливних установок
Для автоматизації процесу головного водовідливу застосовуються різні засоби і системи автоматизації у вигляді апаратури: АВН.1М, УАВ, ВАВ, ВАВ.1М.
Апаратура ВАВ.1М є модернізованим варіантом випускаємої раніше апаратури, ВАВ, УАВ. ВАВ.1М призначена для застосування на діючих, перебудовах і шахтах, що будуються, небезпечних за газом та пилом, раптовими викидами газу і забезпечує автоматичне керування до трьох насосів з двигунами високої напруги. Автоматичне управління насосними агрегатами здійснюється у функції рівня в водозбірнику з корекцією графіка роботи відповідно до встановлених періодів максимуму енергосистеми [4].
Апаратура ВАВ.1М забезпечує [5]:
- автоматичне керування роботою насосних агрегатів у функції рівня води;
- дистанційне і місцеве ручне керування роботою насосних агрегатів;
- в разі відмови робочого насоса автоматичне включення резервного;
- черговість роботи насосів;
- послідовність запуску і зупинки насосів при їх паралельній роботі;
- заборона включення в роботу несправного насосу;
- корекцію графіка роботи насосу з метою створення природних умов його відключення на період максимуму енергосистеми;
- облік часу роботи насосних агрегатів;
- відображення сигналів на табло диспетчера про рівень води в водозбірнику, роботу насосів, відмову та вигляд несправності в роботі установки, часу періоду максимуму енергосистеми.
3.2 Існуючі методи контролю кавітації в насосних установках
Контроль виникнення кавітації в насосному агрегаті може бути здійснений за величиною вакууметріческого тиску в трубопроводі, що підводить, і по вакууметріческой висоті всмоктування. Однак застосування цих способів пов'язане з труднощами в їх технічної реалізації і не завжди своєчасно дозволяє визначити розвиток кавітаційних явищ.
Для контролю кавітації можуть бути застосовані кореляційні ультразвукові методи контролю за величиною шуму кавітуючій рідини в двох різних перетинах [6]. Однак, застосування цього методу ускладнене в промислових умовах через значний вплив шумового фактору працюючих механізмів на співвідношення корисний сигнал-шум.
Крім того, аналіз літературних джерел показує, що найбільш ефективним є застосування ультразвукових засобів контролю кавітації, що реагують на зміну фізичних властивостей рідини, наприклад, за величиною швидкості проходження пружних коливань в кавітуючій рідини в залежності від процентного вмісту вільного повітря [7].
Цей метод контролю кавітації є найбільш простим і точним в реалізації.
4. Основні результати досліджень та розробки
Алгоритм роботи пристрою захисту шахтної водовідливної установки від анормальних режимів роботи
Пристрій захисту шахтної водовідливної установки від анормальних режимів роботи має виконувати покладені на нього функції, тобто функціонувати наступним чином.
При підключенні джерела живлення пристрій опитує первинний п'єзоелектричний перетворювач про кавітаційний стан насосної установки, тобто, чи є кавітація у всмоктуючому трубопроводі або на вході в робоче колесо насосу.
Отримавши сигнал від перетворювача, пристрій фіксує два рівня кавітації: поріг неінтенсивної кавітації, коли кавітація тільки починається або вже закінчується і зону інтенсивної кавітації.
Якщо насос потрапляє в так звану зону інтенсивної кавітації пристрій починає регулювання робочого режиму насоса з метою виведення його із зони кавітації, тобто збільшення його кавітаційного запасу.
Пристрій впливає на електропривод заслінки, встановленої на нагнітальному трубопроводі. Заслінка повертається і змінює гідравлічний напір нагнітального трубопроводу, тим самим змінюючи його гідравлічну характеристику, а з нею і режим роботи насосного агрегату.
Управління режимом роботи водовідливної установки здійснюється поки насос не буде виведен із зони кавітації або поки робоча точка на гідравлічній характеристиці насоса не зміститься до кордону зони його промислового використання. У цьому випадку будь-яке подальше управління заслінкою неприпустимо, тому в цьому випадку пристрій автоматично виключає контур автоматичного регулювання насоса і буде працювати тільки в режимі видачі інформації про кавітаційний стан водовідливної установки.
На малюнку 1 приведен алгоритм роботи пристрою контролю і захисту головної водовідливної установки від кавітації.
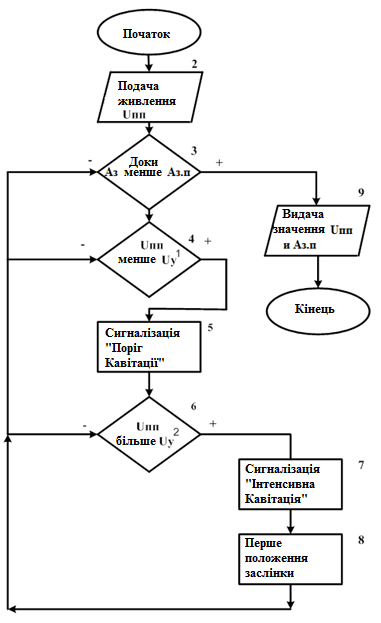
Рисунок 1 – Блок схема алгоритму функціонування пристрою захисту шахтної водовідливної установки від анормальних режимів роботи
Як видно з малюнка 1 функціонування схеми починається з подачі напруги (блок 2) і сигналу від п'єзоелектричного перетворювача про кавітаційний стан водовідливної установки.
У блоці 3 встановлені умови регулювання режимом насосу і межа роботи контуру регулювання пристрою. Робочу точку насоса можливо пересувати уздовж характеристики насоса поки кут повороту заслінки не стане відповідати граничному коефіцієнту кривої гідравлічної характеристики напірного трубопроводу.
У блоці 4 встановлюється перша межа кавітації, яка відповідає порогу кавітації в зоні неінтенсивній кавітації.
У блоці 5 відображається світлова сигналізація про знаходження головної водовідливної установки в зоні неінтенсивній кавітації.
У блоці 6 покладена друга межа кавітації, яка відповідає зоні інтенсивної кавітації. Знаходження насосу в межах цієї зони неприпустимо, тому блок 8, виконує роботу контуру захисту (регулювання) пристрою автоматизації, в функції якого входять ступінчате регулювання куту повороту заслінки.
Регулювання кута відбувається до тих пір, поки насос не буде виведен із зони інтенсивної кавітації, або допоки робоча точка насоса не наблизиться до кордону його промислового використання.
Структурна схема пристрою захисту шахтної водовідливної установки від анормальних режимів роботи
На малюнку 2 зображена структурна схема спроектованого пристрою автоматичного контролю та захисту (УАКЗ) водовідливної установки від анормальних режимів роботи.
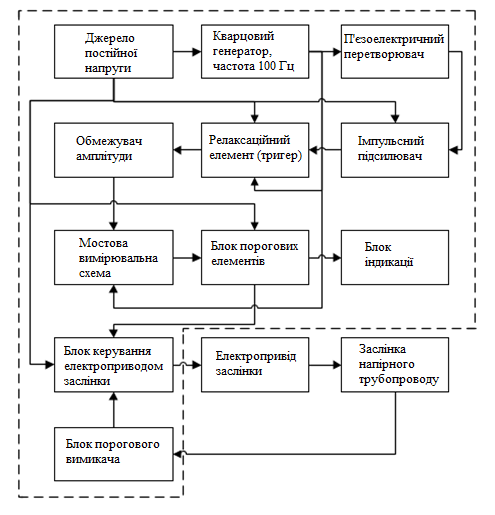
Рисунок 2 – Структурна схема пристрою захисту і стабілізації кавитационного запасу водовідливної установки
Принцип дії пристрою заснований на вимірюванні рівня кавітації у всмоктуючому трубопроводі шляхом порівнювання швидкості ультразвуку в кавітуючій і звичайної рідини з подальшим формуванням керуючого впливу для регулювання кавитационного запасу працюючого насосного агрегату.
Пристрій працює наступним чином. З кварцового генератора імпульси збудження фіксованої частоти надходять в п'езоелектричний перетворювач, вихід якого підключен до входу широкосмугового імпульсного підсилювача. Після посилення сигнал надходить на відповідний вхід триггерной схеми. В її функції входить формування імпульсів, тривалість яких визначається тривалістю імпульсів з виходу імпульсного підсилювача, а частота - частотою сигналу генератора
Імпульси з виходу тригерної схеми надходять в обмежувач амплітуди і далі в мостову вимірювальну схему, в якій здійснюється порівнювання напруг з виходу генератору і з виходу обмежувача амплітуди. При сталості амплітуди сигналу і частоти кварцового генератора в діагоналі мостової схеми створюється струм разбалансу, що залежить від тривалості імпульсів з виходу п'єзоелектричного перетворювача. Сигнал розбалансу з виходу мостової вимірювальної схеми надходить в блок порогових елементів, в якому за величиною струму уставки і амплітудою струму разбаланса задаються порогові значення інтенсивності кавітації у всмоктуючому трубопроводі. Вихідний сигнал блоку управління приводом заслінки формує керуючий сигнал на продовження роботи насосу або на включення приводу заслінки нагнітального трубопроводу при виникненні кавітації.
Висновки
В результаті розгляду шахтної водовідливної установки як об'єкту автоматизації сформульовані основні вимоги до пристрою та системи автоматичного контролю і захисту шахтної водовідливної установки від кавітації.
Критичний аналіз існуючих систем автоматизації дозволив встановити, що в даний час відсутній безперервний контроль за порогом і ступенем кавітації в насосному агрегаті. Це дозволило намітити основні напрямки щодо вдосконалення засобів і систем автоматизації шахтних водовідливних установок і розробити алгоритм автоматичного регулювання, який забезпечує високу ефективність роботи шахтного водовідливу.
Розроблено метод визначення інтенсивності кавітації, алгоритм функціонування і структурна схема пристрою захисту шахтної водовідливної установки від анормальних режимів роботи.
Таким чином, застосування розробляємого пристрою підвищить надійність і ефективність роботи водовідливної установки в автоматичному режимі, істотно покращить умови праці робітників, підвищить безпеку, а також покращить техніко - економічні показники роботи вугільного підприємства.
Перелік посилань
- Гейер В.Г. Шахтные вентиляторные и водоотливные установки. - М.: Недра, 1987. – 270 с.
- Шевчук С.П. Повышение эффективности водоотливных установок- К.: Техника, 1991. – 53 с.
- Попов В.М. Водоотливные установки. – М.: Недра, 1990. - 294 с.
- Батицкий В.А., Лухолетов В.И., Рыжков А.А. Автоматизация производственных процессов и АСУТП в горной промышленности. - М.: Недра, 1991. - 303 с.
- Научные труды высших учебных заведений Литовской ССР. – Ультразвук. – Каунасс. – 1979, №11.
- Карелин В.Я. Кавитационные явления в центробежных и осевых насосах. - М.: Недра, 1975. – 353 с.
- Шутилов В.А Основы физики ультразвука. - Л.: Изд-во Ленинградского университета, 1980. – 280 с. – 288 с.