
Зміст
- Вступ
- 1. Актуальність теми
- 2. Мета і задачі дослідження та заплановані результати
- 3. Огляд досліджень та розробок
- 3.1 Аналіз шахтного акумуляторного електровоза як об'єкта автоматизації
- 3.2 Спрощена силова схема управління дводвигуновим акумуляторним електровозом
- 3.3 Алгоритм автоматичного управління шахтним акумуляторним електровозом
- Висновки
- Перелік посилань
Вступ
У нашій країні підземним способом добувають близько 30% металевих руд і гірничо–хімічної сировини, проте на підземних роботах зайнята значно більша кількість трудящих, чим на відкритих роботах. Це пояснюється тим, що при підземному способі розробляють менш потужні, чим при відкритому способі, або глубокозалегающие родовища.
При відкритому способі розробки порушується земна поверхня, значні площі займають відвали порожньої породи. З метою охорони довкілля доводиться витрачати великі кошти на рекультивацію порушених земель.
Основним напрямом подальшого розвитку вітчизняної гірничодобувної промисловості є підвищення продуктивності праці за рахунок технічного переозброєння підприємств на базі новій високопродуктивній техніці і впровадження передової технології гірських робіт. Розвиток техніки для видобутку руд базується на застосуванні комплексів машин і устаткування, механізацію, що забезпечують, і автоматизацію усіх виробничих процесів.
Однією з найбільш важливих ланок в комплексній механізації підземного видобутку руд є процес переміщення руди від забою до поверхні, включаючи операції випуску, вантаження і доставки її в межах очисного забою і транспорту по магістральних виробленнях до ствола шахти. На доставку і транспортування руди припадає близько 50% усіх витрат по здобичі. У зв'язку з цим розроблена і досліджена система управління шахтним акумуляторним електровозом з двигуном постійного струму в руховому і гальмівному режимах з можливістю рекуперації енергії.
До сучасних машин копальневого транспорту пред'являються такі основні вимоги, як високий рівень якості, надійності, надійності і довговічності, агрегатування, стандартизація і уніфікація складальних одиниць, що забезпечують складання транспортних машин багатоцільового призначення, дотримання санітарних норм по рівню шуму, вібрації і запиленої, автоматизація на базі мікропроцесорної техніки і дистанційне керування транспортний машина.
На підприємствах гірничо–рудної промисловості залежно від призначення і гірничо–геологічних умов використовують різні види транспортних машин.
При підземному видобутку корисних копалин в якості основних видів копальневого транспорту застосовують доставку з використанням рейкового транспорту, а в деяких випадках самохідні навантажувальні транспортні машини, підземні автосамоскиди.
Основним напрямом на підземних гірських роботах після копалин являється застосування високопродуктивного устаткування з електричним приводом для перевезення викопних, допоміжних вантажів і людей.
1. Актуальність теми
Основний напрям розвитку вікатки електровоза – впровадження потокової технології транспорту руди вагонетками з міжкузовним перекриттям і донним розвантаженням, що забезпечують безперервний процес вантаження і розвантаження складу. Це дозволяє збільшити в 1,5–2 рази продуктивність вікатки електровоза і в 5–6 разів підвищити пропускну спроможність навантажувальних пунктів.
Більшість копальневих електровозів, вживаних в шахтах, мають тяговий електропривод з контактною системою управління. Така система дозволяє здійснювати ступінчастий пуск і регулювання швидкості із застосуванням пускорегулирующего реостата, а також паралельного і послідовного з'єднання тягових двигунів. Застосовується реостатне електродинамічне гальмування. Такі системи управління тяговим електроприводом недостатньо надійні, їх робота супроводжується значними кидками пускового і гальмівного струму і зусиль. При цьому часто виникає прослизання коліс електровоза відносно рейок. Використання реостатної системи управління електроприводом викликає підвищені втрати електричної енергії.
2. Мета і задачі дослідження та заплановані результати
Більшість копальневих електровозів, вживаних в шахтах, мають тяговий електропривод з контактною системою управління. Така система дозволяє здійснювати ступінчастий пуск і регулювання швидкості із застосуванням пускорегулирующего реостата, а також паралельного і послідовного з'єднання тягових двигунів. Застосовується реостатне електродинамічне гальмування. Такі системи управління тяговим електроприводом недостатньо надійні, їх робота супроводжується значними кидками пускового і гальмівного струму і зусиль. При цьому часто виникає прослизання коліс електровоза відносно рейок. Використання реостатної системи управління електроприводом викликає підвищені втрати електричної енергії.
Розвиток напівпровідникової техніки дозволяє замінити вищеназвані системи РКСУ на электроэнергоэффективные структури з транзисторно-імпульсними системами управління (ТрСУ) регулювання напруги.
Застосування таких систем на копальневому транспорті електровоза дозволить:
– зменшити на 35–50% споживання електричної енергії електровозом;
– мінімізувати втрати енергії в усіх елементах системи;
– плавно регулювати напругу, що підводиться до двигуна, що дозволить максимально регулювати сили тяги і гальмування за умовами зчеплення;
– добитися гнучкості і простоти управління з можливістю автоматичного і дистанційного управління, а також управління за системою багатьох одиниць;
– автоматично обмежити небезпечні режими роботи усього комплексу електричного устаткування електровоза;
– застосувати систему моніторингу стану устаткування;
– здійснити ефективний захист від буксування електровоза;
– підвищити безпеку роботи і обслуговування;
– добитися мінімальних габаритів, маси і вартості.
На шахтах, не небезпечних по газу і пилу, доцільно використати тільки акумуляторні електровози, які простіше по конструкції, дешевше і зручніше в експлуатації, мають велику потужність і швидкість руху, меншу витрату енергії.
Виняткове місце в цьому комплексі займає двигун постійного струму з послідовним збудженням.Достоїнства двигунів постійного струму послідовного збудження : м'яка механічна характеристика, що спрощує роботу і налаштування багаторухових систем з індивідуальним розподілом навантажень на провідні осі, високу межу по перевантажувальній здатності.
Недоліками ж є: низька енергоефективність, зважаючи на часте використання релейно–реостатного управління, і втрату потужності на активних елементах, складність конструкції приводу, складне технічне обслуговування в процесі експлуатації, підтримка швидкості на різних рівнях руху рухомого складу. Усі ці недоліки і є кроком для подальшої модернізації об'єкту.
Метою магістерської дисертації є розробка і дослідження системи управління шахтним акумуляторним електровозом з двигуном постійного струму в руховому і гальмівному режимах з можливістю рекуперації енергії.
3. Огляд досліджень та розробок
3.1. Аналіз шахтного акумуляторного електровоза як об'єкту автоматизації
Шахтний електровоз є одним з основних засобів доставки вугілля, матеріалів і людей в горизонтальних підземних виробленнях вугільних шахт небезпечних по газу або пилу, при цьому велику частину від усієї кількості електровозів, складають акумуляторні електровози. На електровозах широко використовуються системи приводу, що складаються з двох тягових електродвигунів послідовного збудження і реостатною системою управління. Ця система приводу має ряд відомих достоїнств і недоліків. До достоїнств реостатних систем управління слід віднести простоту схеми і конструкції облаштування управління, а застосування двигунів послідовного збудження найбільш відповідає характеристикам електровоза в частині забезпечення відсутності тієї, що пробуксувала.Недоліки реостатних систем управління пов'язані з низькими величинами коефіцієнта корисної дії, обумовленими витратою обмеженого запасу енергії акумуляторної батареї на нагрів реостатів схеми управління, а до недоліків схем з послідовним збудженням двигунів послідовного збудження слід віднести неможливість забезпечення рекуперації енергії в гальмівних режимах. Для виключення вказаних недоліків схем управління стали з'являтися різні безреостатные системи. У безреостатных схемах управління регулювання швидкості руху здійснюється, як правило, шляхом зміни напруги або за рахунок перемикання секцій батарей або за рахунок застосування імпульсних схем управління. Застосування схем управління з секціонуванням батарей відрізняється значною складністю і обмеженим числом східців, при цьому досить легко забезпечується можливість рекуперативних способів гальмування.
3.2 Спрощена силова схема управління дводвигуновим акумуляторним електровозом
Імпульсні схеми управління дозволяють забезпечити плавне управління швидкістю за допомогою відносно простих схем управління, проте для здійснення рекуперативних режимів роботи силова схема істотно ускладнюється.
На малюнку 1 приведена спрощена силова схема управління дводвигуновим акумуляторним електровозом, що поєднує достоїнства імпульсних схем управління і схем з секціонуванням живлячих батарей. У схемі, для здійснення можливості рекуперації в гальмівних режимах двигуни включені за схемою незалежного збудження.
Мал. 1 – Спрощена силова схема управління дводвигуновим акумуляторним електровозом
(Анімація: 3 кадри, затримка між кадрами 0,5 с, 71кб)
На схемі силові ключі VT1 – VT3 забезпечують перемикання двох секцій батарей з послідовного в паралельний режим роботи, при цьому включений стан VT1 відповідає послідовному включенню батарей, а включений стан ключів VT2 і VT3 відповідає паралельному включенню секцій батарей. Перемикання системи живлення в паралельний режим роботи робить можливою роботу приводу в режимах рекуперації енергії. Силові ключі VT4 - VT9 призначені для управління обмотками збудження двигунами M1 і M2. При цьому реверс двигунів здійснюється зміною напряму струму в обмотках збудження. Силові ключі VT11 і VT13 призначені для управління струмом якоря тягових двигунів, а ключі VT10 і VT12 призначені для здійснення динамічного гальмування при зниженні швидкості, коли рекуперативне гальмування не можливе. Усі силові ключі управляються через узгоджуючий пристрій мікропроцесорним облаштуванням управління.Плавність управління досягається за рахунок застосування режимів широко–імпульсного управління силовими ключами, при цьому пристрій управління контролює струми в обмотках приводу і швидкість руху.
Ефективність роботи приведеної схеми шахтним акумуляторним електровозом визначається алгоритмом роботи мікропроцесорного облаштування управління, аналіз якого зручно виконувати на базі математичної моделі приводу. Для прикладу була розглянута математична модель тягового електровоза АМ8Д з двигунами ДРТ- 13. Моделювання проводилося для одного двигуна.
Механічна характеристика двигуна в режимі незалежного збудження описується вираженням:
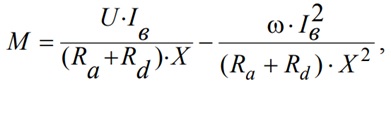
де: М - електромагнітний момент що розвивається двигуном, U – напруга живлення обмотки якоря, Iв – струм обмотки збудження, Rа і Rd – активні опори обмотки якоря і додаткового полюса, ω – швидкість обертання якоря, X – конструктивна константа, для двигуна ДРТ – 13 – X=60.264.Рівняння руху можна описати як:
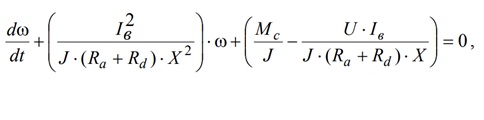
де: J – приведений момент інерції, Мс – приведений момент опору. З урахуванням цього отримана залежність зміни швидкості обертання двигуна від часу при незмінних значеннях навантаження і параметрів управління :
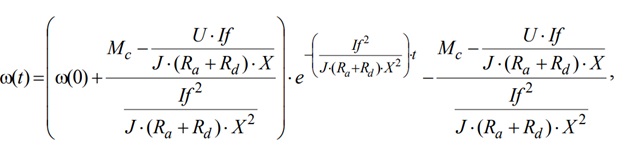
де: ω(0) – швидкість обертання якоря на початку модельованої ділянки, t – час від початку модельованої ділянки.
Для описаної вище силової схеми управління були розглянуті два алгоритми управління, управління, що реалізовуються мікропроцесорним пристроєм. Мета управління : здійснити розгін електровоза із складом до приведеної швидкості електродвигунів 100рад/сік, а після 10 секунд з моменту старту здійснення зниження приведеної швидкості до величини 10 рад/сек.
3.3 Алгоритм автоматичного управління шахтним акумуляторним електровозом
Перший алгоритм передбачає подання ручних команд для зміни напруги живлення обмотки якоря кожних 2 секунди для ступінчастої зміни швидкості без обмежень по струму і прискоренню. Другий алгоритм реалізує пропорційний закон управління з обмеженням граничного струму якоря. У алгоритмі реалізований з дискретизацією за часом, а крок дискретизації склав 10 мс, що зручно для реалізації за допомогою сучасного недорогого мікроконтроллера.
Робота приводу електровоза здійснювалася при постійній величині струму збудження 50А. Регулювання напруги і струмів в схемі здійснюється шляхом ШИМ управління відповідних транзисторів.
Залежність зміни напруги від часу для обох алгоритмів приведена на малюнку 2. Ручне (ступінчасте) регулювання - залежність 1, автоматичне з пропорційним регулятором – залежність 2.
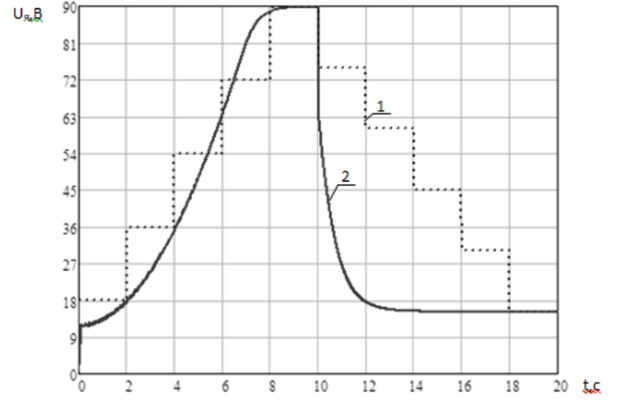
Мал. 2 – Зміна напруги живлення обмотки
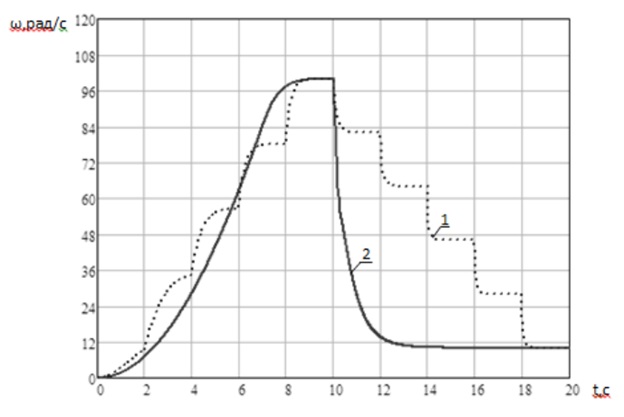
Мал. 3 – Зміна швидкості обертання валу двигуна
Отримані в результаті моделі моделювання залежності зміни швидкості від часу приведені на малюнку 3.
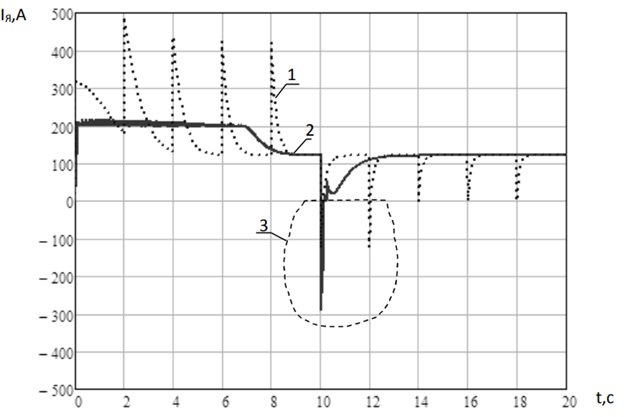
Мал. 4 – Зміна струму якоря при розгоні і гальмуванні
Область негативних струмів (3) відповідає рекуперативному гальмуванню. Для його забезпечення здійснювалося перемикання з послідовною на паралельну схему включення батарей, при цьому напруга знижувалася в два рази.
Висновки
Проведені розрахунки показали працездатність прийнятої системи управління. При цьому для здійснення управління досить застосовувати простий пропорційний закон управління з обмеженням величини струму якоря. В той же час ефективність рекуперації енергії при зниженні напруги в 2 рази за рахунок перемикання двох секцій недостатня, а розділення на 4 і більше секцій з відповідним рівнем зниження напруги призводять до ускладнення силової схеми управління.
Перелік посилань
- Беловидов, Б.С. Анализ различных типов приводов для рудничных автоматизированных электровозов / Б. С. Беловидов [и др.]. // Исследование работы автоматизация горных машин: тр. Новочеркасского политехнического института. – Новочеркасск: 1964. – Т. 159. – С. 31–38.
- Довженко В.П. Транзисторные модули для управления приводо рудничных электровозов / В. П. Довженко [и др.]. //Уголь Украины. – 2003. – № 10.–16– 18.
- Евстафенко П.Ф. Перспективы развития электрооборудования для удничного электровозного транспорта / П.Ф. Евстафенко [и др.]. //Уголь Украи-ны. –2003. –№ 10. – С. 22–23.
- Синчук О. Н, Удовенко О. А., Чумак В. В. Особенности переходных электромагнитных процессов в тяговом электроприводе с импульсным преобразователем напряжения рудничных аккумуляторных электровозов. // Электротехника, 2004, №6. – С.58-60.
- Системы управления рудничным электровозным транспортом. /О. Н. Синчук, Т. М. Беридзе, Э. С. Гузов и др. - М.: Недра, 1993.- 255 с.
- Пискунов С. В., Ворошилов В. С, Поляков В. А. Тяговые асинхронные двигатели для приводов подвижного состава городского электротранспорта. // Электротехника, 2005. - № 5. - С. 32 - 34.
- Конашинский А. Ю. Влияние электрических видов коррекции
электромеханических характеристик асинхронных тяговых двигателей
на их энергетические показатели. // Электровозостроение: Сб. науч. тр.
ОАО
Всерос. науч.-исслед. и проектно-конструкт. ин-т электровозостроения
(ОАОВЭлНИИ
). - Новочеркасск, 2000. - Т. 42. С. 228-241. - Мальцева О.П., Удут Л.С., Кояин Н.В. Системы управления асинхронных частотно-регулируемых электроприводов. – Томск: Изд. ТПУ, 2011. – 476с.
- Кладиев С. Н., Вильнин А. Д., Пякилля Б. И. Модель электромеханической системы подвижного состава рудничного электровоза // Современные технологии. Системный анализ. Моделирование. – 2013 – №. 1(37). – C. 65-68 [2814-2013]
- Вильнин А.Д., Кладиев С.Н. Структура тягового электропривода рудничного электровоза// Современные проблемы и пути их решения в науке, транспорте, производстве и образовании: сб. науч. тр. – Одесса, 2011. – Том 2. – С. 80-85.