
Реферат за темою випускної роботи
Зміст

Анімація: 14 кадрів, ∞ циклів |
|---|
Вступ
Одним з перспективних напрямків розвитку і вдосконалення галузей промисловості є впровадження та використання промислових роботів на великих і середніх виробництвах. промислові роботи мають великий функціональною гнучкістю за рахунок прогресивних виконавчих механізмів, ефективних приводів, мікропроцесорних систем з розвиненим програмним забезпеченням, технічного зору та інших засобів чуттєвості, а також адаптивних можливостей і елементів штучного інтелекту. Такі роботи дозволяють замінити людину на виробничих роботах, пов'язаних з важкими, монотонними, небезпечними і шкідливими умовами праці. Важливою особливістю промислових роботів є можливість їх використання для виконання робіт, які не можуть бути механізовані й автоматизовані традиційними засобами [1].
1. Актуальність теми
Сучасний промисловий робот–маніпулятор застосовується для заміни людської праці. Так, робот може використовувати інструментальний захват для утримання інструменту і здійснення обробки заготовки, або тримати саму заготовку для подачі її в робочу зону для подальшої обробки.
При застосуванні робота продуктивність зазвичай підвищується, так як робот може виконувати переміщення і позиціонування робочого інструмента значно швидше людини, а також завдяки безперервній роботі робота 24 години на добу без зупинок, на відміну від людини. При правильному виборі роботизованої системи продуктивність зростає в рази або навіть на порядок в порівнянні з ручним виробництвом.
2. Мета і задачі дослідження та заплановані результати
Метою роботи є розробка системи автоматичного управління узгодженим рухом ланок маніпуляторів промислового двурукого робота, призначеного для завантажувально–розвантажувальних робіт важких, тендітних і листових матеріалів скляного, сталевого, фанерного і інших виконань.
Мета розробки – поліпшення умов праці для робочого персоналу, підвищення оперативності і виключення помилок при маніпулюванні вантажів різної тяжкості на виробництві.
Завданнями системи автоматичного управління дворуким роботом є:
- Досягнення заданих показників якості при реалізації автоматичної системи управління дворуким роботом.
- Реалізація безперервного циклу роботи двурукого робота
- Забезпечення високої точності позиціонування схопив робота за рахунок керування виконавчими механізмами.
- Управління приводами на зчленуваннях для забезпечення швидкодії і точності управління робочими органами.
3. Постановка задачі
Об'єктом управління в даній роботі є дворукий промисловий робот (ПР). Він являє собою універсальне електромеханічний пристрій, що складається з двох маніпуляторів – виконавчих механізмів. Базовими елементами робота є маніпулятори – механізми, що володіють декількома ступенями рухливості і призначені для переміщення і орієнтації об'єктів в робочому просторі. Багатоланкова конструкція маніпулятора закінчується захватом або змінним інструментом, які призначені для захоплення об'єктів певної форми і виконання технологічних операцій відповідно. маніпулятори ПР призначені для виконання рухових функцій при переміщенні об'єктів в просторі. Переміщення робота здійснюється по рейках. Конструктивно даний ПР є розімкнутий контур, що складається з 10 твердих тіл (ланок), послідовно з'єднаних зчленуваннями, які призводять ланки в обертальний рух за допомогою силових приводів, встановлених на кожному зчленуванні (рис. 1) [3].
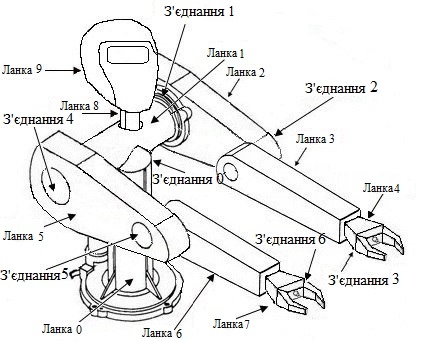
Рисунок 1 – Конструкція дворукого робота
Ланка 0 є підставою маніпулятора, а ланка 1 являє собою плечовий суглоб,
який перпендикулярно приєднаний до основи. На ньому кріпляться руки
робота – маніпулятори.
Кінець кожної «руки» забезпечений робочим інструментом – захват, який призначений для захоплення
і утримання об'єктів маніпулювання. Відносний рух зчленувань переходить ланкам, внаслідок цього захвати маніпулятора займають в просторі необхідне положення для захвату
об'єктів.
Захватні пристрої маніпуляторів призначені для захвату плоских листових матеріалів і мають тип двохпозиційного центруючого захвату. Даний тип захвата забезпечує високоточне положення в просторі. Конструкція захвата передбачає поворот на 90° за рахунок вбудованих в захвати поворотних пневмодвигунів. Це дозволяє виконувати захват як горизонтально, так і вертикально розташованих матеріалів.
4. Склад і принцип роботи системи
Дворукі роботи широкого призначення є універсальними механізмами з великим спектром технологічних можливостей, тому що розраховані на транспортування матеріалів, що легко руйнуються, складної конфігурації. Тому даний об'єкт управління повинен забезпечувати високу точність позиціонування для забезпечення цілісності вантажів [4].
В цілому, процес управління рухом ланок маніпуляторів дворукого ПР можна уявити таким чином:
Крок 1. Задайте координати точок позиціонування, вихідної і кінцевої точок.
Крок 2. Перемістіть пристрій захоплення в координати деталі, захопленої з поверхні.
Крок 3. Перейти в положення захоплення деталі.
Крок 4. Увімкніть пневматичний захват і захоплення частини.
Крок 5. Перемістіть захоплення з деталлю в потрібне місце.
Крок 6. Вимкніть захват.
Крок 7 . Повторіть крок 2.
На основі описаного вище алгоритму, який лежить в основі програми дій робота, ми визначаємо структуру об’єкта з усіма допоміжними пристроями, необхідними для його роботи.
ПР складається з наступних основних частин (рис. 2):– маніпулятор;
– інформаційна система;
– програмне забезпечення системи управління.
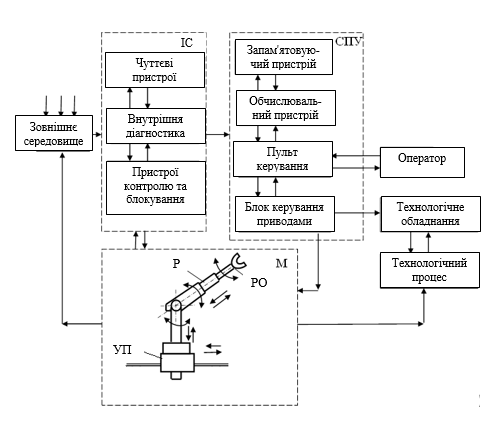
Рисунок 2 – Схема складу системи управління маніпулятора робота
Висновки
В роботі наведена розробка системи автоматичного керування рухом ланок маніпуляторів дворукого робота, призначеного для виконання завантажувально-розвантажувальних операцій тендітних, важких і листових матеріалів фанерного, скляного, сталевого та інших виконань. Приведення ланок в рух здійснюється по жорстко заданій цикловій програмі. На першому етапі роботи було проведено аналіз об’єкта автоматизації, визначено його характеристики та вимоги, за якими необхідно провести синтез спостерігаючої САУ.
Перелік посилань
- Козырев Ю.Г. Современные промышленные роботы: Каталог / Под ред. Ю.Г. Козырева, Я.А.Шифрина. – М.: Машиностроение, 1984. – 152 с.
- Фу К. Робототехника / Фу К., Гонсалес Р., Ли К. – М.: Мир, 1989. – 624 с.
- Шахинпур М. Курс робототехники / Шахинпур М. – М.: Мир, 1990. – 527 с.
- Зайцев Г.Ф. Теория автоматического управления и регулирования / Зайцев Г.Ф. – К.: Вища школа, 1989. – 431 с.
- Дорф Р. Современные системы управления / Дорф Р., Бишоп Р; Пер. с англ. Копылова Б.И. – М.: Лаборатория Базовых Знаний, 2004. – 832 с.
- Козырев Ю.Г. Промышленные роботы: Справочник / Козырев Ю.Г. – М.: Машиностроение, 1983. – 376 с.
- Голдсуорт Б. Проектирование цифровых логических устройств / Б. Голдсуорт. – М.: Машиностроение, 1985. – 288 с.
- Уилкинсон Б. Основы проектирования цифровых схем / Б. Уилкинсон. – М.: Издательский дом «Вильямс», 2004. – 320 с.
- Бурдаков С.Ф. Проектирование манипуляторов промышленных роботов и роботизированных комплексов / Бурдаков С.Ф., Дьяченко В.А., Тимофеев А.Н. – М.: Высш. шк., 1986. – 264 с.
- Зенкевич С.Л. Основы управления манипуляционными роботами / С.Л. Зенкевич, А.С. Ющенко. – МГТУ им. Н. Э. Баумана, 2005. - 400 с.
- Филлипс Ч. Системы управления с обратной связью / Филлипс Ч., Харбор Р. – М.: Лаборатория Базовых Знаний, 2001. – 616 с: ил.
- Канунник И.А. Механика роботов и манипуляторов: Учеб. пособие / Канунник И.А., Фалалеева Р.В. - Красноярск: Изд-во Краснояр. аграрного ун-та, 1996. – 376 c.
- Попов Е.П. Основы робототехники: Введение в специальность: Учеб. для вузов по спец. «Роботехнические системы и комплексы» / Попов Е.П., Письменный Г.В. – М.: Высш. шк., 1990. – 224 с., ил.
- Нестеров А.Л. Проектирование АСУТП. Методические указания. Книга 1 / Нестеров А.Л. – СПб Издательство ДЕАН, 2006. – 552 с.
- Олссон Г. Цифровые системы автоматизации и управления / Г. Олссон, Д.Пиани – СПб.: Невский Диаллект, 2001. – 557 с.: ил.