Начало развития
Термин «робототехника» подразумевает прикладную науку, которая занимается разработкой технических автоматизированных систем и является важной составляющей интенсификации производства. В своем развитии робототехника опирается на такие дисциплины, как механика, электроника, информатика. Первые предпосылки создания механических систем появились в 400 году н. э. — механический голубь греческого математика Архита.
Далее, около 1495 года, были сделаны первые записи человеко-подобного робота. Автором записей является Леонардо да Винчи, предложивший чертежи, схемы железного рыцаря, способного передвигаться, двигать конечностями и сидеть.
Термин «робототехника» стал употребляться гораздо позднее, когда появился в печати в 1941 году [1].
Первое поколение роботов: манипуляторы
В 30-х годах в США начался процесс автоматизации производства. Так, Генри Форд создал автоматическую производственную линию, которая способствовала разделению процесса производства на мелкие этапы [2]. Таким образом, Форд добился снижения требований к квалификации рабочих. До производственной линии созданием автомобилей занимались команды высококвалифицированных рабочих.
Однако, считается [3], что первый индустриальный робот был разработан Уиллардом Поллардом и Гарольдом Роузландом в 1938 году для крупнейшей компании по производству компрессоров и распылителей — DeVilbiss Company. Его чертеж представлен на рисунке 1.
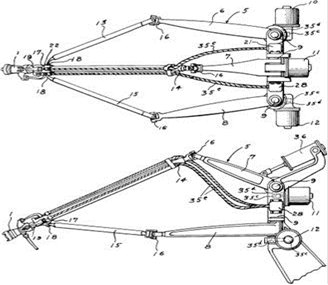
Рисунок 1 — Робот-манипулятор Уилларда Л.В. Полларда
Второе поколение роботов: сенсорные
До 70-х годов роботов обычно не оснащали датчиками. Но с 1968 года появилось второе поколение роботов с интегрированными сенсорами. Эти роботы уже могли реагировать на окружающую среду и решать задачи по различным сценариям.
В этот период крупные игроки на рынке промышленности верили в огромные преимущества, которые сулили роботы. В развитие робототехники продолжали вливаться инвестиции. [4]. Изображение с временной линией представлено на рисунке 2:

Рисунок 2 — Период развития второго поколения роботов
Многие считают, что эра роботов началась в 1980-м году. Тогда миллиарды долларов были вложены компаниями по всему миру в автоматизацию основных задач на производственных линиях. Продажи промышленных роботов выросли на 80% по сравнению с предыдущими годами.
В эти годы появились ключевые технологии: в 1980-м году был расширен открытый доступ в Интернет, в 1983-м Ethernet стал стандартом (IEEE 802.3), в 1991-м было анонсировано ядро Linux.
Роботы, созданные в период между 1980-м и 1999-м годами — это роботы третьего поколения — перепрограммируемые, со специализированными контроллерами. Роботы населяли многие промышленные секторы и использовались для самых разнообразных видов деятельности: покраска, пайка, перемещение, сборка и т.д.[5]
Будущее робототехники
Роботы должны адаптироваться к любой среде. Этот факт был ранее обозначен для промышленной робототехники, где роботы должны были свободно владеть заводскими языками. Это относится также и к сервисным роботам (например, домашним роботам, которым необходимо будет адаптироваться к посудомоечным, стиральным машинам, серверам мультимедиа и т. д.), медицинским роботам и многим другим областям робототехники. Такие рассуждения приводят к созданию операционной системы аппаратного робота (H-ROS), аппаратно-программной инфраструктуры, не зависящей от поставщика, для создания взаимозаменяемых компонентов робота. H-ROS создается поверх ROS, которая используется для определения набора стандартизованных логических интерфейсов, которые должны соответствовать каждому физическому компоненту робота, если он совместим с H-ROS [6].
H-ROS облегчает создание роботов, выбирая лучший компонент для каждого прецедента из общего рынка роботов. Он соответствует различным средам (промышленным, профессиональным, медицинским), где такие переменные, как временные ограничения, являются критическими. Построение или расширение роботов упрощается до того момента, когда компоненты H-ROS совместимы. Пользователю просто нужно запрограммировать когнитивную часть (то есть мозг) робота и разработать свои собственные варианты использования. H-ROS избавляет от работы над интеграцией различных технологий и аппаратных интерфейсов [7]. Предполагаемое развитие роботов на ближайшие 20 лет представлено на рисунке 3:
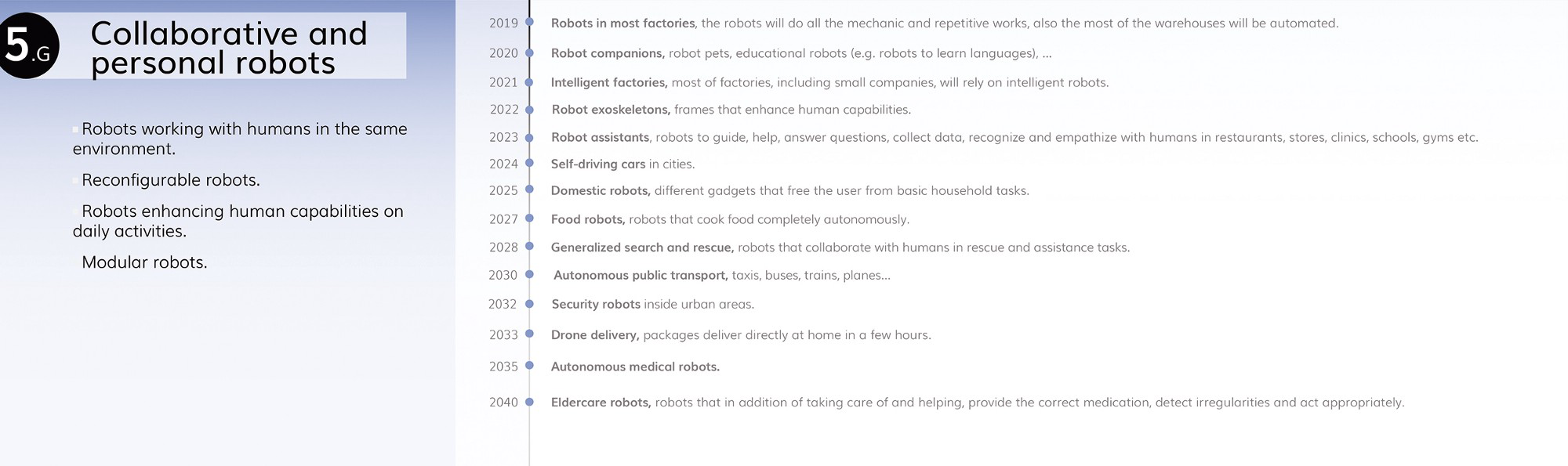
Рисунок 3 — Развитие «персонального» поколения роботов
Список литературы
1. Анализ развития робототехники. Интернет ресурс. Режим доступа: https://studbooks.net...
2. Там же.
3. Там же.
4. Перспективы развития робототехники. Интернет ресурс. Режим доступа: https://mentamore.com...
5. Прошлое и будущее робототехники. Интернет ресурс. Режим доступа http://robotoved.ru...
6. Robotics, the traditional path and new approaches. Интернет ресурс. Режим доступа: https://robohub.org...
7. Там же.