Аннотация
Иорданов Р.В., Завадская Т.В., Кушниренко Е.Н. – Основные этапы проектирования робота Определены этапы проектирования мобильного робота. В статье предлагается реализация основных этапов проектирования. Приведена структурная схема робота. Современные технологии предлагаются в качестве инструментов разработки. На основе разработанного математического аппарата и структурной схемы представлена окончательная модель робота.
Ключевые слова
робототехника, проектирование, структурная схема, модель мобильного робота, моделирование, поведение
Введение
На сегодняшний день робототехника является наиболее прогрессирующей областью. Основные цели, которые преследуют инженеры при создании роботов – это облегчение труда и снижение риска для жизни человека. Таким образом, внедрение роботизированных систем позволяет существенно изменить темп развития различных отраслей.
Данная статья освещает проблему создания роботов. В частности, рассматривается этап моделирования и симуляции поведения робота.
Постановка задачи
Правильная организация плана проектирования робота необходима для уменьшения количества возможных ошибок на каждом этапе работы. После определения входных данных и основных задач, которые должен выполнить робот, работа над проектом выглядит следующим образом:
- Определение технического облика робота, его систем и подсистем. Составление структурной схемы.
- Выбрать основные функциональные элементы.
- Для разработки математического аппарата.
- Выбрать инструменты разработки.
- Чтобы создать модель робота.
- Для имитации поведения робота. Чтобы проверить это.
- Создание прототипа работы.
Этот план отражает основные этапы развития. Особенностью такой организации является возможность возврата к предыдущему этапу для устранения возникших ошибок.
Реализация
На основе структурной схемы, представленной на рисунке 1, была создана модель робота.
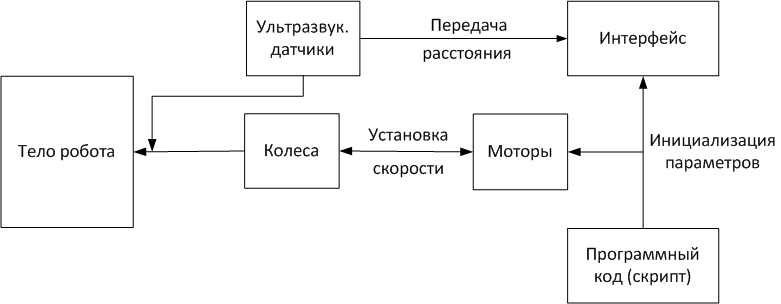
Рисунок 1 – Структурная диаграмма
Модель включает в себя такие компоненты, как: ультразвуковые датчики, моторы, колеса, программный код. Ультразвуковые датчики - это датчики, работа которых описывается эхолокации. Ультразвуковой датчик посылает импульс, отмечая время его возвращения назад, и таким образом робот ориентируется в пространстве. Важным преимуществом ультразвуковых датчиков является их непривязанность ко времени суток. Датчики успешно проявляют себя как ночью, так и днем, что значительно расширяет спектр их использования. Поведение мобильного робота является автономным.
Двигатели и колеса робота прикреплены к корпусу таким образом, чтобы обеспечить достаточную устойчивость модели. Ось колеса смещена на несколько сантиметров от центра корпуса робота вдоль оси X, а третье пассивное колесо (ползунок) находится прямо напротив. Ползунок также оснащен датчиком силы и, в случае чрезмерной нагрузки на этот элемент, он отключается. Необходимость такой конструкции объясняется важностью расчета массы каждого из элементов, а также всей модели в целом
Опасность заключается не в точном ходе симуляции, а в неправильном поведении модели, когда масса не соответствует требуемым значениям. Слишком маленький вес робота приводит к невозможности его вращения и ускорения, в то время как слишком большой вес может помешать движению модели.
Трехколесные основания удобны тем, что нет необходимости учитывать большое количество элементов. Программирование движения таких систем намного проще, но в то же время робот успешно справится с поставленными задачами.
Для организации движения мобильного робота был разработан математический аппарат. Это позволяет подключать полученные данные от датчиков и на их основе влиять на систему движения модели.
После инициализации датчиков необходимо прочитать данные, используя функцию чтения. Работа функции связана с моментом, когда основной скрипт запускает часть, ответственную за активацию датчиков. После выполнения функция возвращает некоторые параметры, необходимые для дальнейшего моделирования.
Полученные параметры являются результатом и некоторым расстоянием. Результатом является состояние датчиков: препятствие обнаружено, не обнаружено, произошла ошибка. Расстояние - это расстояние от датчиков до обнаруженной точки препятствия.
Расстояние проверяется для условия ограничения расстояния: если доступное расстояние меньше предела, выполняется следующий шаг. Другими словами, робот преодолел заданное ограничение обнаружения препятствий датчиками и успешно определил препятствие. Следующим шагом является вычисление точки для каждого датчика.
Скорости вращения колес затем корректируются в соответствии со следующими формулами [1, 2]:

где  – скорость вращения колеса в предыдущий момент времени, W - коэффициенты Брайтенберга, Dist. - расчетное расстояние обнаруженной точки на предыдущем шаге.
– скорость вращения колеса в предыдущий момент времени, W - коэффициенты Брайтенберга, Dist. - расчетное расстояние обнаруженной точки на предыдущем шаге.
Блок-схема описанного алгоритма приведена на рисунке 2:
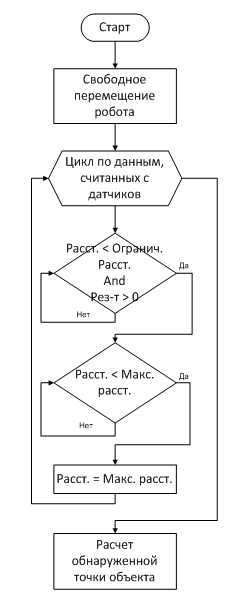
Рисунок 2 - Блок-схема алгоритма
Моделирование занимает существенную часть времени при разработке робота [2]. Создание модели позволяет организовать логику движения роботов, работы систем и подсистем. Также на этом этапе происходит корректировка данных задач.
Модель представлена на рисунке 3:
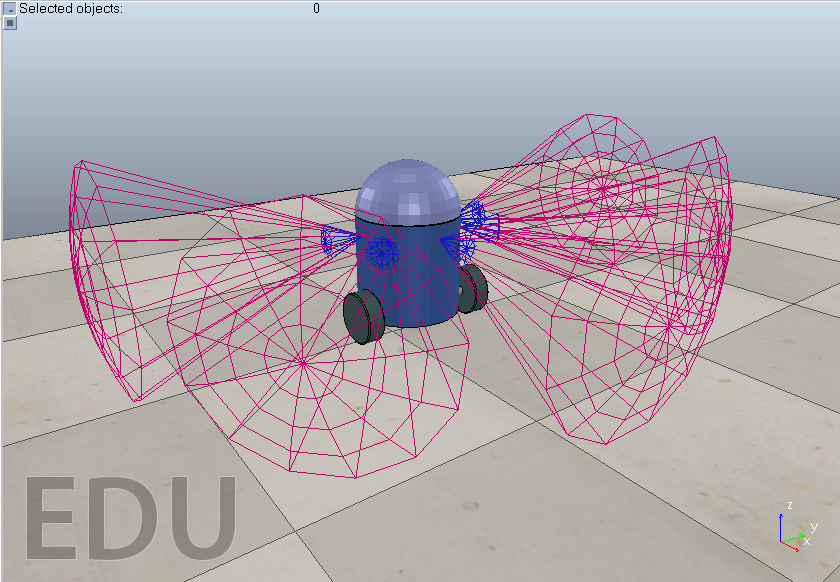
Модель была разработана с использованием робота-симулятора V-REP (Virtual Robot Experimentation Platform) [3], который отвечал всем требованиям для разработки модели. В частности, предоставлен режим моделирования поведения мобильного робота в реальном времени и гибкая настройка основных компонентов.
После создания модели полученные данные анализируются. В случае отсутствия ошибок организуется подготовка к симуляции. Под симуляцией подразумевается поддержка различных условий и во время тестов контролируется реакция робота. Созданные условия позволяют всесторонне изучить поведение робота. Корректировка результатов в случае ошибочного поведения роботизированной системы также является обязательной.
Создание пользовательского интерфейса является дополнительным компонентом моделирования робота и его подсистемы. Интерфейс включает в себя следующие элементы:
- Функциональные кнопки для закрытия и сворачивания окна;
- Ползунок изменения скорости;
- Флажок блокировки двигателя.
При запуске симуляции это окно будет отображаться в окне программы V-REP. Предполагается, что окно имеет функциональные клавиши сворачивания и закрытия для расширения удобства использования интерфейса.
Ползунок изменения скорости необходим для проверки баланса модели. Такое решение позволяет проверять точность сборки всех элементов робота и, в случае некорректного поведения, корректировать положение элементов, массы модели после прекращения симуляции.
Блокировка двигателей используется в случае, если робот вышел из строя, и необходимо срочно принять меры, чтобы избежать аварии без остановки симуляции. Использование этой меры направлено на то, чтобы приблизить симуляцию к реальной работе робота.
В целом, наличие интерфейса значительно увеличивает возможности проектируемой модели, а также позволяет пользователю принимать непосредственное участие в моделировании.
В заключение следует сказать, что процесс моделирования дает возможность создать модель робота, проверить адекватность его работы, выбрать условия исследования и устранить ошибки.
После этого были выполнены шесть этапов разработки классической роботизированной системы.
Список литературы
1. Robotics [Интернет-ресурс] .– Режим доступа: https://en.wikipedia.org/wiki/Robotics
2. Modeling stage [Интернет-ресурс] .– Режим доступа: https://knowledge.allbest.ru...
3. V-REP [Интернет-ресурс] .– Режим доступа: http://www.coppeliarobotics.com/