
ЗМІСТ
- ВСТУП
- 1. АНАЛІЗ ОБ'ЄКТА УПРАВЛІННЯ
- 1.1 Основні конструктивні, технологічні і техніко-експлуатаційні характеристики і проблематика об'єкта управління
- 1.2 Опис руху кулі по похилому жолобу
- 1.3 Формалізація об'єкта управління і вимоги до САУ
- 2. ОГЛЯД І АНАЛІЗ ВІДОМИХ РІШЕНЬ ПО АВТОМАТИЗАЦІЇ ОБ'ЄКТА
- 2.1 Аналіз існуючих систем управління
- 2.2 Аналіз існуючих систем комп'ютерного зору
- 2.3 Цілі і завдання розробки
- 3. ПРОЕКТУВАННЯ Лабороторного МАКЕТА САУ
- 3.1 Обгрунтування прийнятого напрямки вирішення завдання роботи
- 3.2 Функціональна схема САУ
- 3.3 Вибір і розробка технічних засобів САУ
- 3.3.1 Вибір мікроконтролера
- 3.3.2 Вибір відео камери
- 3.3.3 Вибір сервоприводів
- 3.3.4 Вибір ПК
- ВИСНОВКИ
- ПЕРЕЛІК ПОСИЛАНЬ
ВСТУП
Проектування, експлуатація та вдосконалення систем автоматичного управління, прийняття оптимальних рішень і знаходження необхідного і правильного способу автоматизації є складними завданнями, для вирішення яких потрібні кваліфіковані фахівці в галузі управління та моделювання систем. Очевидно, що для підготовки висококваліфікованих фахівців, які б мали глибокі теоретичні знання і мали практичні навички роботи в галузі електроніки, автоматики, а також в області телекомунікаційних систем і мереж, потрібно в навчальному процесі використовувати досить прості наочні посібники та макети систем автоматики, які були б виготовлені за безпосередньої участі студентів. Робота студентів над такими проектами,
1. АНАЛІЗ ОБ'ЄКТА УПРАВЛІННЯ
1.1 Основні конструктивні, технологічні і техніко-експлуатаційні характеристики і проблематика об'єкта управління
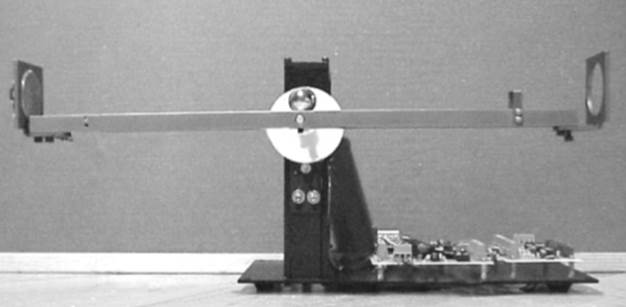
Запропонована система, що складається з кулі і жолоби, так само називається «Ball and Beam». Найчастіше дана установка зустрічається в більшості технічних лабораторій. Це пов'язано з простотою самої конструкції та реалізації системи автоматичного управління. Дана система дозволяє впоратися з реальними проблемами такі як горизонтальна стабілізація літака під час посадки і турбулентного повітряного потоку.
Розроблюваний навчально-лабораторний стенд «Ball and Beam» з використанням web-камери складається безпосередньо з кулі радіусом 20мм, сталевий рейки 30см і відеокамери, яка розташована над жолобом таким чином, що захоплює його повністю. Сам жолоб з одного краю закріплений до нерухомої стійці, а інший - через важіль до шестерні вала сервоприводу, який здійснює рух жолоба. Нижче на рис 1.1 наведена схема установки.
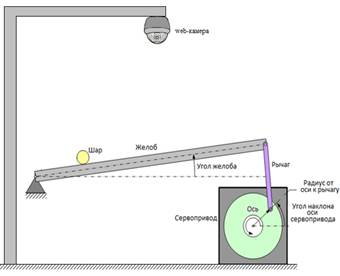
Малюнок 1.1 - Загальний вигляд лабораторного стенду
Контроль стану кулі на жолобі здійснюється за допомогою зміни кута нахилу самого жолоба. У даній роботі використаний алгоритм виділення об'єкта на зображенні з розподілу колірної гами. Даний підхід досить простий і може використовуватися для відстеження об'єкта колір якого відрізняється від фонового. Щоб виділити куля, фон лабораторної установки буде пофарбований одним кольором, тим самим виділивши куля.
Необхідно відстежити рух кульки на жолобі і виділити його будь - якої фігурою. Для цього необхідно провести наступні кроки:
1) виділення пікселів, відповідних кульці;
2) знаходження контуру кульки;
3) побудова кола, в яку потрапляють всі точки контуру кульки.
Для зміни кута нахилу жолоба використовується виконавчий механізму (сервопривід або кроковий двигун), високої потужності, управління яким реалізується на комп'ютері через мікроконтролер. Цифрова камера, встановлена зверху над жолобом, відстежує об'єкт на жолобі і передає значення пікселів на комп'ютер де і обчислюється координата кулі в режимі реального часу. І на основі даних координат проводиться розрахунок кута, на який повинен нахилитися жолоб. Зображення передається на ПК.
Шарик можна змусити рухатися по будь-якій траєкторії і навіть стабілізувати його. Такий спосіб управління описує принцип управління по зворотного зв'язку. Мета системи полягає в тому, щоб контролювати і зберігати положення кулі в бажаної контрольній точці і компенсувати обурення.
Для опису системи слід використовувати метод простору станів. Нелінійність незначна при малих кутах відхилення жолоби від горизонтального положення, в цьому випадку можна просто линеаризовать систему. При великих кутах нахилу жолоба, нелінійність стає більш значущою. В цьому випадку необхідно більш ретельно провести апроксимацію.
1.2 Опис руху кулі по похилому жолобу
Для опису руху кулі досить знати закон руху будь-якої його точки і закон обертання тіла щодо цієї точки.
Рівняння руху кулі, отримаємо при наступних припущеннях: куля масою m = 0.005 [кг] і радіусом R = 0.02 [м] котиться без проковзування по двох паралельних напрямних жолоби, відстань між якими L = 0.015 [м], встановленим під кутом
![]() до горизонту на відстані
до горизонту на відстані
![]() один від одного [2]. На кулю діють сила тяжіння
один від одного [2]. На кулю діють сила тяжіння
![]() , прикладена до центру мас, результуюча
, прикладена до центру мас, результуюча
![]() двох сил реакції з боку жолоба, перпендикулярна похилій площині, утвореної напрямними, і проходить через центр мас кулі, а також результуюча
двох сил реакції з боку жолоба, перпендикулярна похилій площині, утвореної напрямними, і проходить через центр мас кулі, а також результуюча
![]() двох сил тертя спокою [3], що діє уздовж напрямних (рис. 1.2).
двох сил тертя спокою [3], що діє уздовж напрямних (рис. 1.2).
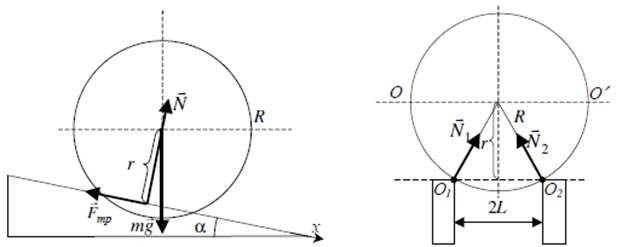
Малюнок 1.2 - Скочування кулі по похилому жолобу
Рух кулі описується системою двох рівнянь, на підставі [1] (рівняння руху центру мас і рівняння моментів):
 (1.1)
(1.1)
де
![]() - момент інерції кулі;
- момент інерції кулі;
![]() - плече сили тертя
- плече сили тертя
![]() ;
;
![]() - кутове прискорення, пов'язане з лінійним прискоренням рівнянням кінематичного зв'язку
- кутове прискорення, пов'язане з лінійним прискоренням рівнянням кінематичного зв'язку
![]() .
.
Помноживши перше рівняння з (1.1) на
![]() і склавши його з другим з урахуванням
і склавши його з другим з урахуванням
![]() , отримаємо рівняння руху кулі по площині при відсутності прослизання в вигляді:
, отримаємо рівняння руху кулі по площині при відсутності прослизання в вигляді:
 (1.2)
(1.2)
Так як у випадку кулі
![]() і
і
![]() [4], то рівняння (1.2) може бути представлено у вигляді:
[4], то рівняння (1.2) може бути представлено у вигляді:
 , При
, При
 . (1.3)
. (1.3)
1.3 Формалізація об'єкта управління і вимоги до САУ
З урахуванням виконаного вище аналізу особливостей даної системи, отримана схема основних каналів управління балансування кулі [1] на жолобі.
Основний керованої змінної, що характеризує установку «Ball and Beam», є (рис.1.2) - місце розташування (координата) кулі .
Керуючі вплив, що дозволяє потрібним чином впливати на розгляд керуючої змінну (рис. 1.2) - кут сервоприводу.
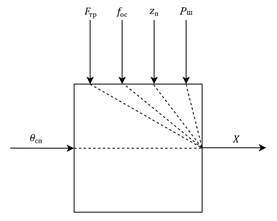
Малюнок 1.3 - Представлення установки «Ball and Beam» як об'єкта управління
Основними збуреннями, що впливають на керовану змінну, є змінні (рис.1.2):
- сила тертя;
- зовнішні перешкоди (вітер, поштовх кулі рукою і т. Д.);
- нерівномірність жолоби;
- колір кулі і зовнішнє освітлення.
Шарик детектується на рейці і таким чином виставляється кут повороту виконавчого механізму, жолоб рухається, а разом з ним і починає рух об'єкт управління.
2. ОГЛЯД І АНАЛІЗ ВІДОМИХ РІШЕНЬ ПО АВТОМАТИЗАЦІЇ ОБ'ЄКТА
2.1 Аналіз існуючих систем управління
Вже згадана система «Ball and Beam» з використанням web-камери є просту конструкцію, для візуального спостереження всіх правил класичної теорії автоматичного управління. Раннє, дана система, тільки без використання комп'ютерного зору, була сконструйована і продемонстрована багатьма організаціями.
Ще в 1999 році Hirsch побудував свою «Ball on Beam System». Фотографія системи представлена (рис. 2.1). В системі використовувався ультразвуковий датчик для вимірювання положення м'яча. Кут повороту вимірювався при використанні потенціометра. Двигун з коробкою передач приводився в дію потужним операційним підсилювачем ланцюга. Система управління нею ПД контролером. Більшість аналогів систем використовують такий тип конфігурації, як Hirsch.
Малюнок 2.1 - Система «Ball on Beam System»
Компанія «Arroyo» побудувала систему під назвою «Ball on Balancing Beam» в 2005 році (рис. 2.2). В системі використовувався резистивний датчик для вимірювання положення кульки. Резистивний датчик положення діяв як стеклосчістиватель, подібний потенціометра в результаті чого було відомо положення кулі. Використовувався двигун постійного струму з редуктором. Система контролювалася також за допомогою ПД контролера.

Малюнок 2.2 - Система «Ball on Balancing Beam»
Ця система була легко побудована, і ПД контролер був простий в розробці. Недоліком системи «Ball on Balancing Beam» полягало те, що жолоб був зроблений з акрилу, який занадто тендітним для раптового удару і самого зіткнення з кулею. Крім того, кут нахилу жолоба не вимірювався і не контролювався. Хоча, положення кулі контролювалося ПД контролером. З технічної точки зору система була не дуже надійною.
Кафедра електротехніки в університеті Лейкхед побудувала систему під назвою «Ball and Beam Balancer» в 2006 році (рис. 2.3). В системі використовувався двигун постійного струму з вбудованим редуктором, резистивний датчик положення і цифровий кодер. Система контролювалася контролером LQR.

Малюнок 2.3 - Система «Ball and Beam Balancer»
Система «Ball and Beam Balancer» мала один вхід (вхід напруги двигуна) і два виходи (положення кулі і кут нахилу жолоба). Система була дуже надійною, оскільки метод простору станів з контролером LQR хороший в управлінні системою MIMO (множинний вхід, множинний вихід). Конструкція системи «Ball and Beam Balancer» була важкою, тому що жолоб був з алюмінію, який набагато важче акрилу
Паралельно з університетом Лейкхед, компанія Quanser представляє свій комерційний продукт під назвою «Ball and Beam Module» (рис. 2.4). Модуль складався з датчика положення, виконаний резистивним проводами і серводвигуном постійного струму зі зменшеною коробкою передач. Система може управлятися ПІД-регулятором або контролером простору станів. Відносний малий мотор можна використовувати для системи через ефект плеча.

Малюнок 2.4 - Система «Ball and Beam Module» виробництва Quanser
Компанією Quanser так само була запропонована схожа САУ кулькою тільки не на жолобі, а на платформі, іменована 2DOF Ball Balancer. Дана реалізація представлена на рис.2.5.

Малюнок 2.5 - Система управління, представлена лабораторією
Quanzer
Дана платформа складається з пластини, на якій повинен знаходиться кулька, двох сервоприводів виробництва лабораторії Quanzer, які підключені до бічних сторонах пластини, а також камери високої роздільної здатності. Пластина може повертатися в будь-якому напрямку. Контролюючи стан шестерень сервоприводом можна регулювати положення пластини, щоб збалансувати кульку до бажаної позиції. За допомогою програмного забезпечення можна задавати траєкторію кульки, використовуючи мікроконтролер. З точки зору управління даний лабораторний стенд реалізує принцип управління по зворотного зв'язку. Даний стенд повністю задовольняє мети даної роботи. Недоліком даної системи є ціна і платне програмне забезпечення компанії Quanzer.
На підставі аналізу існуючих систем балансування кульки на жолобі і на платформі, був здійснений вибір власної реалізації даного стенду, враховуючи результат попередніх медіа розробок і компілюючи їх. Як принципу управління був обраний принцип зворотного зв'язку, так як саме він найбільш підходить для реалізації системи. Так як нам необхідно регулювати кут повороту сервоприводу на підставі прийнятої від камери інформації.
2.2 Аналіз існуючих систем комп'ютерного зору
Для лабораторного макета слід проаналізувати існуючі алгоритми комп'ютерного зору. В даний час, для спостереження за об'єктами за допомогою відеокамери запропоновані бібліотеки: OpenCV, PCL (Point Cloud Library) і JMyron. Кожна з даних бібліотек має свої особливості, свої алгоритми. Розглянемо кожну по черзі.
OpenCV - бібліотека алгоритмів комп'ютерного зору, обробки зображень та чисельних алгоритмів загального призначення. Переважно використовується в рамках мови C / C ++.
Алгоритм детектування об'єкта можна уявити послідовністю наступних операцій:
1. Отримання кадру з камери;
2. Конвертація зображення з RGB в HSV;
3. Пропущення через маску деякого кольору;
4. Розрахунок моментів зображення.
Нижче наведено приклад реалізації детектування об'єкта за допомогою бібліотека OpenCV.

Малюнок 2.6 - Детектування об'єкта за допомогою OpenCV
Як видно з малюнка всі об'єкти навколо знебарвлюються, і камера бачить тільки необхідний для трекінгу об'єкт, певного кольору.
Дана бібліотека має досить складну програмну реалізацію на увазі її написання на мові C / C ++. Перевага її в тому, що вона краще описує алгоритм виділення кольору необхідного об'єкта.
PCL (Point Cloud Library) - відкритий проект, що дозволяє обробляти зображення в двох-і тривимірному просторі. Бібліотека PCL містить висококласні алгоритми оцінки об'єктів, реконструкції поверхні, 3D реєстрації, підгонки моделей і сегментації.
Наведемо приклади реалізацій даної бібліотеки.
З рис. 2.7 ми бачимо, що бібліотека PCL є досить складною, так як детектування відбувається за трьома координатним осях.
Малюнок 2.7 - Детектування 3D зображення засобами PCL
На рис. 2.8 зображені об'єкти, які розпізнала бібліотека комп'ютерного зору PCL. Провівши аналіз малюнка, ми бачимо, що хмара точок дуже точно розпізнає видимі об'єкти. Ми можемо більш детально їх розглянути на відміну від плоского зображення.
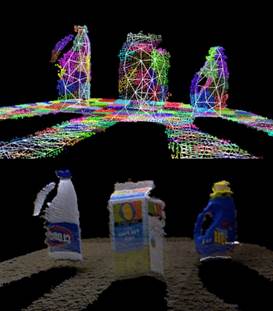
Малюнок 2.8 - Розпізнавання об'єктів в 3D вигляді за допомогою PCL
Перевагою застосування PCL є те, що об'єкт можна повертати, збільшувати або зменшувати [5]. Хмара точок набагато точніше, ніж звичайний креслення і дозволяє наочно доступно розглянути 3D-геометричну модель для подальшої обробки за необхідним вимогам. Недоліком же є необхідність використання більш потужного, а значить більш дорогого обладнання.
Бібліотека комп'ютерного зору JMyron на мові програмування Processing. Дана бібліотека має досить прості алгоритми для реалізації комп'ютерного зору, вона є у відкритому доступі. У мові програмування Processing є бібліотека для взаємодії з мікро контролером Arduino, що є одним з головних переваг. Воно полягає в тому, що і Arduino, і Processing мають досить простий інтерфейс і програмний код, схожий з мовою програмування Java.
Наведемо приклади для трекінгу об'єктів засобами бібліотеки JMyron.
Наведемо приклади реалізацій даної бібліотеки.
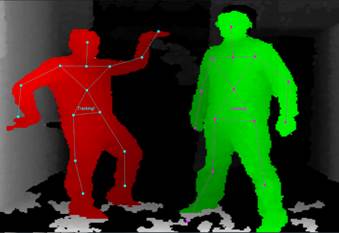
На рис. 2.9 можна помітити, що за допомогою бібліотеки комп'ютерного зору JMyron можна детектування особи.
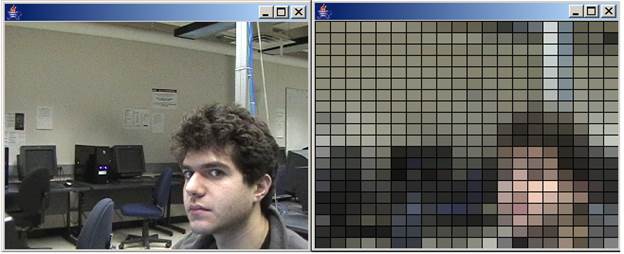
Малюнок 2.9 - Детектування особи засобами JMyron
Однак в даній бібліотеки існує ряд недоліків. Один з головних - це те, що ця бібліотека вкрай чутлива до висвітлення. Для неї необхідний підбір правильної кімнати з необхідним освітленням для правильного детектування об'єкта.
Аналізуючи існуючі бібліотеки комп'ютерного зору, в рамках даної роботи була обрана бібліотека OpenCV, так як вона найбільш точно задовольняє технічним завданням роботи. З огляду на точного детектування об'єкта на жолобі можна отримати точне значення координати для її регулювання і передачі на виконавчий механізм.
2.3 Цілі і завдання розробки
Проведений вище аналіз особливостей і характеристик установки «Ball and Beam» як об'єкта управління дозволяє сформулювати основну мету проекту - сконструювати і контролювати реальну систему «Ball and Beam». Зокрема, цілі перераховані в наступному:
- створити навчально-лабораторний стенд;
- ідентифікувати і визначати параметри системи;
- реалізувати різні алгоритми управління;
- використовувати сконструйовані контролери для управління реальної установкою і порівняйте отримані характеристики.
Для досягнення поставленої мети, необхідно виконати наступні завдання:
1) завдання проектування - підібрати якісну відеокамеру, виконавчий механізм і контролер з необхідним класом точності;
2) завдання для управління - домогтися швидкодії і високої чутливості системи, для досягнення бажаних результатів;
3) інформаційне завдання - забезпечити безперервну двосторонній зв'язок об'єкта управління з диспетчерським пунктом (персональний комп'ютер);
4) завдання для реалізації функцій захисту - вибрати для створення лабораторного стенду надійні матеріали, а також забезпечити безпечні умови студентам для роботи зі стендом.
3. ПРОЕКТУВАННЯ Лабороторного МАКЕТА САУ
3.1 Обгрунтування прийнятого напрямки вирішення завдання роботи
Для досягнення поставленої мети було прийнято рішення скомпілювати дві розробки лабораторії Quanzer це Ball and Beam Module і 2DOF Ball Balancer. Необхідно реалізувати навчально-лабораторний стенд, який повинен складатися з: жолоби, на якому буде здійснюватися рух кулі, сервоприводу, які будуть нахиляти рейку, в залежності від координати кульки на ній і відеокамери, яка буде фіксувати куля на жолобі. Важливим є те, щоб точка дотику з плечем сервоприводу була поєднана з нерухомою точкою закріпленого жолоба. Сервопривод повинен бути встановлений в середнє положення (90 градусів), і висота його повинна бути відрегульована таким чином, щоб плече було в горизонтальному положенні, коли жолоб знаходиться в горизонтальному положенні. Web-камера повинна розташовуватися так, щоб дивилася точно на центр жолоби і захоплювати всю його довжину. Для того щоб детектування кулі було простіше, необхідно створити сильний контраст між зовнішнім фоном лабораторного стенду і кулі. В якості алгоритму комп'ютерного зору була обрана бібліотека OpenCV на мові програмування C ++.
3.2 Функціональна схема САУ
Функціональна схема установки представлена на рис. 3.1:

Малюнок 3.1 - Функціональна схема системи автоматичного управління
Опишемо кожен з компонентів системи.
Web-камера фіксує в реальному часі зображення і передає його на персональний комп'ютер.
Персональний комп'ютер виконує обробку зображення, переданого з web-камери. Тут же реалізований алгоритм комп'ютерного зору і необхідні для роботи регулятори. C камери комп'ютер отримує зображення у вигляді набору пікселів. Компьтер отримує одну координату, друга - константа, так як кулька рухається в одному напрямку. Далі створюється перехрестя, за координатами якої обчислюється центр кулі на жолобі з точністю до одиниць пікселів. За отриманими координатами об'єкта на площині ПК обчислює кут, на які повинен повернутися привід, щоб виконати необхідну. Значення кута передається на мікроконтролер Arduino.
Мікроконтролер Arduino забезпечує зв'язок ПК з приводом. Arduino Uno підключений до ПК за допомогою USB - UART. Кут, обчислені на комп'ютері у вигляді відповідного коду, передаються на плату Arduino, яка в свою чергу змушує приводи повертатися на цей кут.
Виконавчі механізм - сервопривід, підключений безпосередньо до плати Arduino Uno, необхідний для нахилу жолоба, на якому балансується куля.
Об'єкт управління - куля, який рухається по жолобу. Рух кулі, а також його положення фіксується web-камерою.
3.3 Вибір і розробка технічних засобів САУ
В якості технічних засобів в даному проекті, було обрано такі комплектуючі:
- плата Arduino Uno - мікроконтролер через який відбувається управління сервоприводом;
- в якості виконавчого механізму використовується сервопривід, які здійснюють нахил жолоба;
- цифрова відеокамера, яка здійснює детектування кульки на балансує жолобі;
- персональний комп'ютер, в якому реалізований алгоритм управління.
3.3.1 Вибір мікроконтролера
У сучасному світі запропоновано велику кількість мікроконтролерів від різних виробників. При обраної реалізації стенду необхідний контролер, який має в наявності цифрові входу / виходу, з робочою напругою не більше 5В, так як необхідно забезпечити харчування контролера від ПК. Так само контролер повинен бути доступним за ціною і забезпечувати легкість при його програмуванні. Аналізуючи ринок мікроконтролерів був обраний мікроконтролер Arduino Uno (рис.3.2).
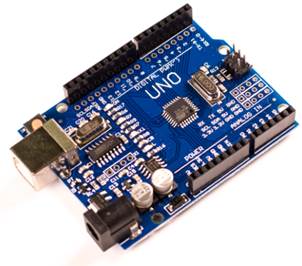
Рисунок 3.2 - Зовнішній вигляд плати Arduino Uno
При обраної реалізації навчально-лабораторного стенду саме плата Arduino Uno є найбільш оптимальною [9]. Arduino Uno - це пристрій на базі мікроконтролера ATmega328. У його склад входить все необхідне для роботи з мікро контролером: 14 цифрових входів / виходів (з них 6 можуть використовуватися в якості ШІМ-виходів), 6 аналогових входів, кварцовий резонатор на 16 МГц, роз'єм USB, роз'єм живлення, роз'єм для внутрисхемного програмування ( ICSP) і кнопка скидання. Для початку роботи з платою досить просто подати живлення від AC / DC-адаптера або батарейки, або підключити його до комп'ютера за допомогою USB-кабелю.
Технічні характеристики Arduino Uno наведені в таблиці 3.1.
Таблиця 3.1 - Технічні характеристики Arduino Uno
|
технічний параметр |
Значення параметру |
|
Робоча напруга, В |
5 |
|
Вхідна напруга (рекомендований), В |
7 - 12 |
|
Вхідна напруга (граничне), В |
6 - 20 |
|
Цифрові входів / виходів, шт |
14 |
|
ШІМ входів / виходів, шт |
6 |
|
Аналогових входів / виходів, шт |
6 |
|
Максимальний струм одного висновку, мА |
20 |
|
Максимальний вихідний струм виводу 3.3В, мА |
50 |
|
Flash - пам'ять, Кбайт |
32 |
|
Енергозалежна пам'ять (SRAM), Кбайт |
2 |
|
Незалежна пам'ять (EEPROM), Кбайт |
1 |
|
Частота процесора, МГц |
16 |
|
Довжина, мм |
68,6 |
|
Ширина, мм |
53,4 |
|
Вага, г |
25 |
3.3.2 Вибір відео камери
Технічним завданням на проект передбачається використання відеокамери як інформаційно-вимірювальної системи для визначення координат положення кулі на площині. Необхідна камера, що має досить великий дозвіл для захоплення в кадр все жолоби. У проекті будемо використовувати цифрову камеру з високою роздільною здатністю Gembird CAM100U (рис.3.3).

Малюнок 3.3 - Зовнішній вигляд web-камери Gembird CAM100U
Дана камера досить дешева і задовольняє вимогам для вирішення поставленого завдання. Технічні характеристики Gembird CAM100U [10] наведені в таблиці 3.2.
Таблиця 3.2 - Технічні характеристики Gembird CAM100U
|
технічний параметр |
Значення параметру |
|
дозвіл відео |
|
|
фокусування |
Ручна |
|
Частота кадрів в секунду |
60 |
|
Об'єктив, Мп / інтерполяція до, Мп |
0,3 / 16 |
|
інтерфейс |
USB 2.0 |
|
Вага, г |
80 |
Для оцінки необхідної швидкодії системи вимірювання координат кулі необхідно визначити можливе мінімальний час перебування кулі на похилій площині. Запишемо наступне рівняння руху кулі по похилому жолобу при відсутності прослизання, на підставі [4]:
 (3.1)
(3.1)
де
![]() - момент інерції кулі;
- момент інерції кулі;
![]() - плече сили тертя
- плече сили тертя
![]() ;
;
![]() - кутове прискорення, пов'язане з лінійним прискоренням рівнянням кінематичного зв'язку
- кутове прискорення, пов'язане з лінійним прискоренням рівнянням кінематичного зв'язку
![]() .
.
Так як у випадку кулі
![]() і
і
![]() [4], то рівняння (3.1) може бути представлено у вигляді:
[4], то рівняння (3.1) може бути представлено у вигляді:
 , При
, При
 , (3.2)
, (3.2)
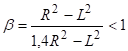
![]()
Умова виконано:
![]() ,
,
![]()
отже,
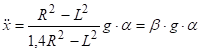
![]() (3.3)
(3.3)
де
![]() - кут нахилу площини;
- кут нахилу площини;
g = 9,8 мс - прискорення вільного падіння.
Припускаючи, що куля знаходиться в будь-якому місці на жолобі, який нахиленої по відношенню до горизонтальної площини на кут 15 0 , на підставі (3.3) легко розрахувати час, за яке куля, якщо його початкова швидкість дорівнювала нулю. Це час складе близько 0,88 с.
Таким чином, в подальших розрахунках слід приймати за мінімальний час перебування кулі на площині час
![]() .
.
3.3.3 Вибір сервоприводів
Згідно функціональної схемою (3.1) в розробляється САУ рухом кулі по похилому жолобу в якості виконавчого пристрою буде використовується сервопривід.
При виборі сервоприводів необхідно керуватися дуже важливими характеристиками сервоприводу, а саме крутним моментом і швидкістю повороту.
Момент сили, або крутний момент (
M ) - векторна фізична величина, що дорівнює добутку радіус-вектора (
![]() ), проведеного від осі обертання до точки прикладання сили, на вектор цієї сили (
F ). Характеризує обертальний дію сили на тверде тіло.
), проведеного від осі обертання до точки прикладання сили, на вектор цієї сили (
F ). Характеризує обертальний дію сили на тверде тіло.
![]() (3.4)
(3.4)
У розробляється лабораторному стенді передбачено наявність важеля, довжина якого становить
![]()
Дана характеристика показує, наскільки важкий вантаж сервопривід здатний утримати в спокої на важелі заданої довжини. Розробляється установка не чинитиме великий вантаж на сервопривід, тому що маса кулі становить m
ш = 0.005 [кг] і маса самого жолоба m
ж = 0.150 [кг]. Сумарний вантаж (
![]() ), який необхідно буде утримувати сервоприводу:
), який необхідно буде утримувати сервоприводу:
![]() (3.5)
(3.5)
Друга характеристика, яку необхідно враховувати, це швидкість повороту вала двигуна. Швидкість сервоприводу вимірюється інтервалом часу, який потрібно важелю сервоприводу, щоб повернутися на 60 °. Ця характеристика важливіша в нашому випадку, тому що необхідно досягти швидкодії виконавчого пристрою (сервоприводу).
Ще один фактор, який необхідно врахувати - це те, що сервопривід буде харчуватися від, раніше обраної, микроконтроллерной плати Arduino Uno у якій робоча напруга 5В.
При аналізі ринку даних механізмів вибір зупинився на фірмі Dsservo. Був обраний сервопривід моделі DS3218 (рис.3.4).

Малюнок 3.4 - Зовнішній вигляд сервоприводу Dsservo DS3218
Слід звернути увагу на напругу, яка подається на сервопривід, якщо воно перевищить допустимий, зубчасті колеса провернути до положення, що перевищує максимального, що спричинить нездатність механізму продовжувати рух в зворотному ході. Збій в роботі мотора не відбудеться, але механічна частина сервоприводу буде пошкоджена.
Технічні характеристики сервоприводу Dsservo DS3218 [11] наведені в таблиці 3.3.
Таблиця 3.3 - Технічні характеристики Dsservo DS3218
|
технічний параметр |
Значення параметру |
|
Робоча напруга, В |
4,8 - 6,8 |
|
Кут повороту, º |
0 - 180 |
|
Кутова швидкість |
0,16сек / 60º |
|
Пусковий момент, кг / см |
19 |
|
матеріал шестерень |
метал |
|
Габаритні розміри, мм |
40 × 20 × 40,5 |
|
Вага, г |
65 |
Обраний сервопривід Dsservo DS3218, задовольняє двом головним характеристикам, при цьому пусковий момент 19 кг / см, говорить про те, що сервопривід утримає на вазі в горизонтальному положенні важіль довжиною 1 см, на вільний кінець якого можна підвісити
19 кг, що набагато перевищує раніше розрахований сумарний вантаж (
![]() ).
).
3.3.4 Вибір ПК
В якості системи, яка реалізує алгоритм управління використовуватимемо персональний комп'ютер. Вимоги до програмного та системного забезпечення комп'ютера:
- процесор з частотою 1,6 ГГц і вище;
- Чи не менее1 ГБ оперативної пам'яті (при роботі на віртуальній машині - мінімум 1,5 ГБ);
- відеокарта з підтримкою дозвіл не менше 1024 х 768 пікселів;
- DirectX 9.0c або вище;
- Windows Vista, Windows 7, Windows 8 або Windows 10.
На ПК необхідна установка необхідного програмного забезпечення, зокрема: VisualStudio 2012 і бібліотеку OpenCV (для програмування самої системи), Arduino (для програмування мікроконтролера), WebCam driver.
ВИСНОВКИ
За результатами роботи можна зробити наступні висновки.
1. Проведено аналіз об'єкта управління - рух кулі по жолобу. Обґрунтовано факти для створення системи автоматизації, сформульовані цілі, описані функції та завдання системи автоматизації навчально-лабораторного стенду.
2. Здійснено вибір концепції для розробки системи автоматичного управління балансування кулі на жолобі для лабораторного стенду. В роботі показано, що найбільш придатною для реалізації САУ є концепція, заснована на управлінні місцем розташування кулі на жолобі за рахунок зміни кута повороту сервоприводу.
3. Виконано вибір технічних елементів, що дозволяють повністю реалізувати необхідні функції САУ. Як інформаційно-вимірювальної пристрою обрана цифрова камера з високою роздільною здатністю Gembird CAM100U. Виконавчий пристрій - сервопривід Tower Pro MG90S. Для зв'язку між обраними елементами і ПК обрана мікроконтролерна плата Arduino Uno.
4. Побудована функціональна схема САУ, виділені основні компоненти системи і проведений аналіз їх роботи.
Таким чином, обраний комплекс технічних засобів САУ рухом кулі по похилому жолобу з використанням комп'ютерного зору разом з розробленими алгоритмами дозволяє повністю реалізувати необхідні функції контролю і управління.
ПЕРЕЛІК ПОСИЛАНЬ
1. Левін М.Є., Риженков В.М. Балансування деталей і вузлів. - М .: Машинобудування, 1986. - 248с.
2. Методи класичної та сучасної теорії автоматичного управління: підручник в 5 томах., Т3: Синтез регуляторів систем автоматичного управління. Під ред. Н.Д.Егупова.- М .: ізд.МГТУ ім. Н. Е. Баумана, 2004. -617c.
3. Лукас, В.А. Теорія автоматичного управління. / В. А.Лукас - М .: Недра, 1990. - 416 с.
4. Мітін І.В. Завдання № 125 Вивчення руху кулі по похилому жолобу. Лабораторний практикум з фізики. Механіка. Москва, 2011. [Електронний ресурс] URL: http://genphys.phys.msu.su/rus/lab/mech/Lab125_1.pdf (дата звернення: 15.11.2018).
5. Форсайт Д., Понс Ж. Комп'ютерне зір. Сучасний підхід. - М .: Вільямс, 2004 г. - 928 с.
6. Глорія Буено Гарсія. Обробка зображень за допомогою OpenCV, 2016. - 210 c ..
7. Філліпс, Ч. Системи управління зі зворотним зв'язком. / Ч. Філліпс, Р. Харбор - М .: Лабораторія Базових знаній.- 2001 - 616 с.
8. Двигун постійного струму [Електронний ресурс]: URL: http://el-mashin.narod.ru/text/53.html (дата звернення: 11.12.2018).
9. Мікроконтроллерні плата. [Електронний ресурс] URL: http://arduino.on.kg/Arduino-UNO (дата звернення: 18.12.2018).
10. Інформаційно-вимірювальний пристрій. [Електронний ресурс] URL: https://www.gembird.ua/0602071.html (Дата звернення: 18.12.2018).
11. Сервопривод. [Електронний ресурс] URL:
http://www.zi-zi.ru/mechanism/motor-mg90s
(дата звернення: 18.12.2018).