
Abstract
Content
- Introduction
- 1. Relevance of the topic
- 2. Goal and tasks of the research, expected results
- 3. Overview of researches and developments
- 3.1 Overview of international experience
- 4. Android OS research for software module development
- Conclusion
- List of sources
Introduction
The purpose of the master's thesis is to analyze the previously developed software module for monitoring the condition of vehicle traffic characteristics, and also to research modern intelligent transport systems. The software module is a mobile application on the Android operating system, in which modern wireless data transmission technologies such as Bluetooth and GPRS are used. It is designed to receive and display the sensor readings of the system for collecting and processing environmental information, as well as to work with the obtained data and the possibility to save this data. The program module as part of the system for collecting and processing environmental information has been created for use in computer monitoring.
1. Relevance of the topic
In modern conditions, it is difficult to imagine a person without a mobile phone, tablet computer or any other portable device. Each of us got used to the fact that the smartphone is always at hand. In recent years, the phone is designed not only for communication, but also contains a large number of useful features, such as, for example, Internet access. Mobile devices have begun to perform a vast range of computing common tasks, these devices can become a new generation of personal computers. The Android operating system is one of the most popular platforms for mobile devices. It is worth to mention that this is not a cheap analogue of the Apple product , as some experts believe, but it is also the main competitor with high dynamics of development. This platform is developed on the Linux kernel and has flexibility of system settings, which is very successfully combined with convenient tools, which is an ideal solution for creating new applications.
One of the distinguishing features of the Android operating system is the fact that it is largely integrated with Google's proprietary services and directly thanks to the special libraries created by this company, Android allows third-party software developers to create apps for it on their own. [1]
2. Goal and tasks of the research, expected results
Goal and tasks of the research are to optimize the computational resources of the software module of the system for collecting and processing information about the environment, as well as to derive patterns and trends.
The idea of the work is to conduct a scientific study using a mobile phone with Android OS to obtain actual sensor readings of the system for collecting and processing environmental information
The main tasks of the research. To achieve this goal, the following tasks have already been solved:
- The issues related to the structure and architecture of the Android operating system were considered, the principles of functioning and interaction were analyzed and software and hardware parts of the OS were studied.
- Various options of data exchange with the use of modern technologies and the help of personal networks were considered. The best options for data transmission interfaces were selected and applied .
- The software module of the wireless operational monitoring system, designed as a mobile application for Android OS, which includes leading technologies of personal wireless networks, was created.
The object of the research is the Android OS, a system for collecting and processing environmental information.
The subject of the research - is the development of a mobile application with the possibility of using the system for collecting and processing environmental information as a software module.
Methodology and research methods. In the process of creating a master's thesis, various methods of comparative and statistical analysis are being used, on the basis of which it is concluded that it is advisable to use the data of the software module for the system for collecting and processing information about the environment.
The research was based on the work of domestic and foreign software developers such as Goloshchapov, Olifer, Darcy, Geiner, and others, Internet sources, as well as materials of scientific conferences and technical materials. [2], [3]
3. Overview of researches and developments
By the global transport community, the solution is no longer to develop vehicle management systems, but transport systems in which communication,
management and control
initially integrated into vehicles and infrastructure, and management methods (decision-making), based on real-time information,
available not only to transport operators, but also to all users of vehicles. The problem is solved by creating an integrated system: people-transport
infrastructure-vehicles, with the maximum implementation of the latest information and control technologies. These advanced
systems became known as
Intelligent. [4]
In the last 10 years, the phrase Intelligent Transport Systems
and the corresponding abbreviations -ITS, have become common
to appear in
strategic, political and program-target documents of the developed States.
The area of ITS promotion varies from solving the problems of public transport, significantly improving road safety, eliminating congestion in transport networks, increasing the productivity of the intermodal transport system (including road, rail, air and sea transport) to environmental and energy problems.
One of the leading directions of ITS development, which has been diligently promoted over the past 15 years, is the implementation of the concept of an intelligent car.
An international
program High security vehicles
has been already integrated. The first experiments using on-Board intelligent systems have shown that they can reduce
number of accidents by 40%, and the number of fatal accidents by 50% [5]
3.1 Overview of international experience
The practical development of large-scale ITS projects dates back to the mid-1980s in Europe, the USA and Japan, when they became available for business applications, personal computers, space positioning technology and cellular communications.
ITS capabilities are clearly demonstrated in PAL (Personal Automated Transport), PRT (Personal Rapid Transit). These are public transport systems that provide constant transportation of passengers on demand thanks to automatic transport systems car without driver. The PRT system uses its own transport network, which can be designed as a roadbed with guides devices, rail track or monorail, or as a combination of these. The user at the stopping point selects the destination, and the system provides a free car or directs passing. The car, taking into account the topology of the network, autonomously chooses the shortest path to the destination. The whole system has centralized computer control at the level of wagon distribution and security. [6]
The latest PRT system was introduced in 2009 at London Heathrow airport, where it connects the fifth, most modern, terminal with remote parkings. It is the first fully commercial PRT system in the world.
Leading industrial auto giants are trying to keep up and have seriously taken up the installation of the autopilot system on production models of cars. At the moment functions testing are being proceeded, and if you rely on the statements of representatives of automakers, the results will exceed all expectations.
A striking representative of such a system is Traffic Jam Assist, which was created by Ford developers on the basis of a research complex in Germany. The System
of traffic jams help
allows vehicles without the help of a driver to move in close rows of cars, to stop, if necessary, and start
to accelerate when the cars in front move freely. In addition, Traffic Jam Assist is able to drive the car on turns and bends of the road. Moreover,
the driver does not make any effort to control the situation, he can afford not to touch the control units. Traffic Jam Assist
operates on the principle of two long-known systems for motorists: cruise control (the system analyzes information about external events from the radar and
makes a decision on
required speed) and the program Lane Assist (does not allow crossing the road line and corrects the direction of movement of the car, taxiing in the right
direction). This autopilot system will allow the car to maintain a constant speed of 50-60 km / h without the driver. But engineers warn that
car owners do not have to completely relax behind the wheel, the human involvement is always necessary.
Volkswagen decided to keep up and announced the success in the development of the Temporary Auto Pilot system. This model of the autopilot system allows
the car to move to self-government not only in traffic jams, but also on roads with high speed. Temporary autopilot
on the mechanisms of actions is almost
identical to Traffic Jam Assist, but several innovations from Volkswagen allow you to include autopilot even at 130 km / h. Google performs testing
car-robot, which is equipped with a set of built-in maps and navigation. This car is able to move on the roads even without the presence of the driver in the cabin.
[7]
4. Android OS research for software module development
If we present the Android component model in the form of a hierarchy (figure 1), then at the very bottom, as the most fundamental and basic component, there will be the core of operating system (Linux Kernel). Often a component model is also called a software stack. Indeed, this definition is appropriate here, because we are talking about a set of software products that work together to get the final result. The actions in this model are performed sequentially, and the hierarchy levels have also consistently interact with each other. [8].
Above the Linux layer is the application infrastructure layer located, which contains the Dalvik virtual machine and some AndroidRunTime(runtime level) libraries. Dalvik uses the Dalvik Executable (*.dex) optimized for minimal memory usage by the application. This is provided by such basic kernel functions Linux as a threading organization and low-level memory management.
Android RT includes a set of core libraries that provide most of the functionality of the Java core libraries.
The Android platform includes a set of libraries used by various OS components. For developers, access to their features is realized through the use of Application Framework. It allows you to harness the full power of the API used in kernel applications. The architecture is built in such a way that any application can use already implemented features of another application, in case it will open access to use its functionality.
At the top is the application layer located. This includes a set of basic applications: e-mail and SMS clients, calendar, various maps, browser, program for contact management and others. [9]
Figure 1 – Android OS architecture
(animation: 6 frames, repetition cycle: infinite, 128 kilobytes)
Before you start using the software module of the monitoring system, you must pair with the hardware of the system. By exploring
various technologies and options for connecting wireless personal networks [10], it was decided to use PAN–Bluetooth as a pairing
organization.
Pairing process is quite simple, you just need to go to the tab Pairing
and after the system request to enable Bluetooth, click
button
Connect the device
. After that, the application will connect to the sensor system by itself and we do not even need to choose it from the proposed list. You can
see it at figure 2
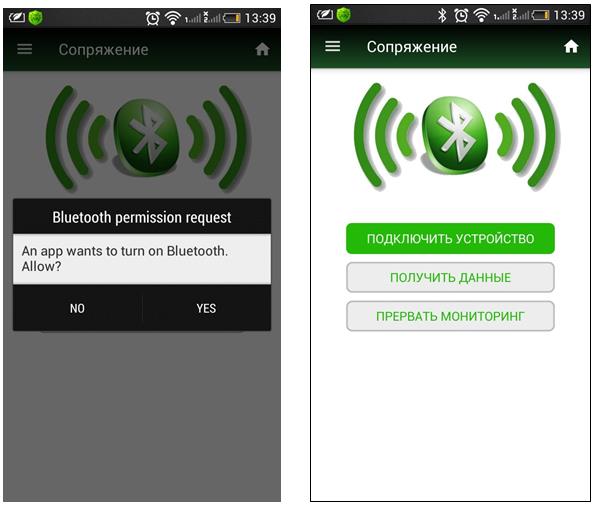
Figure 2 – The process of pairing with the sensor system
As a result of successful pairing with the sensor system, the Get data
and Interrupt monitoring
buttons will become active. After the user clicks
on the button,
the program starts sending requests for sensor readings. A specific code is sent at periodic intervals through the established Bluetooth channel,
then the response from the sensor system will be received and in the Monitoring
tab of our application the actual data will be given, moreover,
there will be an accompanying tip informing us about it.
Conclusion
The result of one of the components of the master's work is the software module of the wireless operational monitoring system which was developed as a mobile application for devices running the Android operating system. The developed application is an important link of the future designing of the automatic piloting vehicles system.
At the moment of writing this abstract, the master's work has not been completed yet. Final completion: may 2020. The full text of the work and materials on the topic can be received from the author or his supervisor after the specified date.
List of sources
- Блог Марка Синната [электронный ресурс] // Wordpress: [сайт]. [2005-2017]. - Режим доступа: https://markfaction.wordpress.com/2012/07/15/stack-based-vs-register-based-virtual-machine-architecture-and-the-dalvik-vm/
- Гейнер, Д. Беспроводные сети. – Вильяме, 2005. – стр.90
- Олифер, В.Г. Компьютерные сети. Принципы, технологии, протоколы / В.Г. Олифер, Н.А. Олифер. – Питер, 2010. – стр.285
- Иванова И. А. Журнал о цифровом видеонаблюдении, IP-решениях, системах безопасности. // Выпуск №3, 2009. - стр.53
- Intelligent Transport Systems in action. Action Plan and Legal Framework for theDeployment of ITS in Europe / Directorate-General for Mobility and Transport ; EuropeanCommission. Luxembourg : Publications Office of the European Union, 2011.
- Benefits of Intelligent Transportation Systems Technologies in Urban Areas: A LiteratureReview. Final Report // Center for Transportation Studies of Portland State University. 2005.April.
- Колодийчук Андрей для блога
ByCars.ru
[электронный ресурс] // ByCars.ru: [сайт]. [2012-2019]. - Режим доступа: https://yandex.ua/turbo?text=https%3A%2F%2Fbycars.ru%2Fjournal%2Fsistemi-avtopilota-dlya-avtomobiley_1760&d=1 - Голощапов А.Л. Google Android: программирование для мобильных устройств. / А.Л.Голощапов – М. : BHV Санкт-Петербург, 2011. – стр.1549
- Медникс З. Программирование под Android / З. Медникс, Л. Доронин, Б. Мик, М.Накамура. – Питер, 2013
- Уваров Р.В. Телекоммуникационные сети и технологии / Р.В. Уваров, В.К. Скляренко, С.И. Зуев, В.Г. Гулян, А.П. Улеев, А.А. Гринь. – Харьков, 2006. – стр.285