
Реферат за темою випускної роботи
Зміст
- Вступ
- 1. Актуальність теми
- 2. Цілі та завдання досліджування, плановані результати
- 3. Огляд досліджень та разробок
- 3.1 Огляд зарубіжного досвіду
- 3.2 Огляд вітчизняних розробок
- 4. Дослідження ОС Android для розробки програмного модуля
- Висновок
- Список джерел
Вступ
Метою магістерської дисертації є аналіз розробленого раніше програмного модуля системи моніторингу стану характеристик руху транспортних засобів, а також дослідження сучасних інтелектуальних транспортних систем. Програмним модулем є мобільний додаток на операційній системі Android, в якому використовуються сучасні технології бездротової передачі даних - такі як Bluetooth і GPRS. Він призначений для отримання і відображення показань датчиків системи збору і обробки інформації із навколишнього середовища, а також для роботи з отриманими даними і можливості їх збереження. Програмний модуль в складі системи збору та обробки інформації із навколишнього середовища створений для застосування в області комп'ютерного моніторингу.
1. Актуальність теми
В нинішніх умовах складно уявити собі людину без мобільного телефону, планшетного комп'ютера або будь-якого іншого портативного пристрою. Кожен з нас звик до тому, що смартфон завжди під рукою. В останні роки телефон призначений не тільки для спілкування, але і містить велику кількість корисних функцій, таких як, наприклад, доступ в інтернет. Мобільні пристрої стали виконувати великий діапазон обчислювальних загальних завдань, ці пристрої можуть стати новим поколінням персональних комп'ютерів. Операційна система Android є однією з найпопулярніших платформ для мобільних пристроїв. Варто відзначити, що це не дешевий аналог продукту від Apple, як вважають певні експерти, а альтернатива і головний конкурент з високою динамікою розвитку. Дана платформа розроблена на ядрі Linux і має гнучкість налаштувань системи, яка досить успішно поєднується з зручним інструментарієм, що є ідеальним рішенням для створення нових додатків.
Однією з відмінних рис операційної системи Android є той факт, що вона в значній мірі інтегрована з фірмовими сервісами компанії Google і безпосередньо завдяки спеціальним бібліотекам, створеними даною компанією Android дає можливість стороннім розробникам програмного забезпечення самостійно створювати додатки для неї. [1]
2. Цілі та завдання досліджування, плановані результати
Мета і завдання досліджень - оптимізувати обчислювальні ресурси програмного модуля системи збору та обробки інформації із навколишнього середовища, а також вивести закономірності і тенденції розвитку.
Ідея роботи полягає в проведенні наукового дослідження при використанні мобільного пристрою під управлінням ОС Android для отримання актуальних показань датчиків навколишнього середовища
Основні завдання досліджень. Для досягнення поставленої мети в роботі вже вирішені наступні завдання:
- Були розглянуті питання, що стосуються структури та архітектури операційної системи Android, проаналізовані і вивчені принципи функціонування і взаємодії програмної та апаратної частин ОС.
- Розглянуті різні варіанти обміну даними з використанням сучасних технологій за допомогою персональних мереж. Обрані і застосовані оптимальні варіанти сполучення.
- Розроблено програмний модуль системи бездротового оперативного моніторингу, виконаний в якості мобільного додатку під ОС Android, яке включає в себе використання провідних технологій персональних бездротових мереж.
Об'єкт дослідження - ОС Android, система збору та обробки інформації із навколишнього середовища.
Предмет дослідження - розробка мобільного додатку з можливістю використання в якості програмного модуля системи збору та обробки інформації із навколишнього середовища.
Методологія і методи дослідження. У процесі створення магістерської дисертації використовуються різні методи порівняльного і статистичного аналізу, на основі яких і робиться висновок про доцільність використання даних програмного модуля для системи збору і обробки інформації із навколишнього середовища.
Інформаційною базою дослідження були роботи вітчизняних та іноземних розробників програмного забезпечення таких, як Голощапів, Оліфер, Дерсі, Гейнер і ін., інтернет джерела, а також матеріали наукових конференцій і матеріали технічного характеру. [2], [3]
3. Огляд досліджень та разробок
Глобальним транспортним співтовариством рішення полягає в розробці вже не систем керування автотранспортом, а транспортних систем, в яких способи зв'язку,
управління та контролю
спочатку інтегровані в транспортні засоби та об'єкти інфраструктури, а способи управління (прийняття рішень), на базі одержуваної в реальному часі інформації,
доступні не тільки транспортним операторам, але і всім користувачам автотранспорту. Завдання вирішується методом створення інтегрованої системи: люди - транспортна
інфраструктура - транспортні засоби, з максимальним впровадженням останніх інформаційно-керуючих технологій. Ці просунуті
системи і стали називати
інтелектуальний. [4]
В останнє 10 років словосполучення Інтелектуальні Транспортні Системи
(Intelligent Transport Systems) і відповідні абревіатури ІТС, ITS - стали часто
фігурувати в
стратегічних, політичних і програмно-цільових документах розвинених держав.
Область просування ІТС варіюється від вирішення завдань громадського автотранспорту, значного підвищення безпеки дорожнього руху, ліквідації заторів у транспортних мережах, збільшення продуктивності інтермодальної транспортної системи (включаючи автомобільний, залізничний, повітряний і морський транспорт) до екологічних та енергетичних проблем.
Один з провідних напрямків розвитку ІТС, який старанно просувається останні 15 років - здійснення концепції інтелектуального автомобіля. Працює міжнародна
програма Транспортні засоби підвищеної безпеки
. Вже перші досліди використання бортових інтелектуальних систем показали, що вони можуть скоротити
кількість
ДТП на 40%, а число ДТП з летальним результатом на 50%. [5]
3.1 Огляд зарубіжного досвіду
Практичне становлення великомасштабних проектів ІТС бере початок в середині 1980 - х рр. в Європі, США і Японії, коли стали доступні для бізнес-додатків персональні комп'ютери, технології космічного позиціонування і стільниковий зв'язок.
Можливості ІТС наочно продемонстровані в системах PAL (Personal Automated Transport: - персональний Автоматичний транспорт), PRT (Personal Rapid Transit). Це системи громадського автотранспорту, які забезпечують постійне транспортування пасажирів за їх вимогою завдяки автоматичним транспортним засобам без водія. Система PRT використовує свою транспортну мережу, яка має можливість бути сконструйованої у вигляді дорожнього полотна з напрямними пристроями, рейкового шляху або монорельса, а також у вигляді комбінації цих пристроїв. Користувач на зупинному пункті вибирає пункт призначення, і система надає вільний вагон або направляє попутний. Вагон з урахуванням топології мережі автономно вибирає найкоротший шлях до пункту призначення. Вся система має централізоване комп'ютерне управління на рівні розподілу вагонів і забезпечення безпеки.[6]
Новітня система PRT в 2009 р. введена в дію в лондонському аеропорту Хітроу, де вона пов'язує п'ятий, найбільш сучасний, термінал з віддаленими автостоянками. Це перша повністю комерційна система PRT у світі.
Провідні промислові автогіганти намагаються не відставати і вже серйозно взялися за установку системи автопілота на серійні моделі автомобілів. В даний момент ведуться перевірки і тестування функцій, і якщо покладатися на заяви представників автоконцернів, то результати перевершують всі очікування.
Яскравим представником такої системи є Traffic Jam Assist, яка була створена розробниками Ford на базі дослідного комплексу в Німеччині. Система
допомоги в пробках
дає можливість автотранспорту без допомоги водія рухатися в тісних рядах машин, виконувати зупинку, якщо це необхідно, і починати
прискорення, коли попереду автомобілі вільно рухаються. Крім того, Traffic Jam Assist здатний керувати автомобілем на поворотах і вигинах дороги. При цьому
водій не докладає ніяких зусиль для контролю ситуації, що відбувається, він може собі дозволити абсолютно не торкатися вузлів управління. Traffic Jam Assist
функціонує за принципом двох давно відомих автолюбителям систем: круїз-контролю (система аналізує інформацію про зовнішні події з радара і приймає рішення про
швидкості) і програми Lane Assist (не допускає перетин дорожньої лінії і вносить поправки в напрямок руху автомобіля, підрулюючи в потрібному
напрямок.) Ця система автопілотування дозволить машині дотримуватися постійної швидкості в 50-60 км / год без участі водія. Але інженери попереджають, що
власники авто не повинні повністю розслаблятися за кермом, участь людини завжди необхідно.
Компанія Volkswagen вирішила не відставати і оголосила про успіхи в розробці системи Temporary Auto Pilot. Ця модель системи автопілотування дозволяє
автомобілю переходити на самоврядування не тільки в пробках, але і на дорогах з високим швидкісним режимом. Тимчасовий автопілот
за механізмами дії практично
ідентичний Traffic Jam Assist, але кілька новацій від Volkswagen дозволяють включати автопілот навіть на швидкості 130 км/ч. Компанія Google виконує тестування
автомобіля-робота, який обладнаний комплексом вбудованих карт і навігацій. Такий автомобіль здатний пересуватися по дорогах навіть без присутності водія в салоні.
[7]
3.2 Огляд вітчизняних розробок
У Росії в області ІТС найбільший розвиток отримали системи управління дорожнім рухом. Їх розвиток на принципах ІТС дозволяє перейти від управління окремими світлофорними об'єктами до управління рухом на автомобільних дорогах, зонах вулично-дорожньої мережі або в цілому рухом у місті. Для реалізації сервісів ІТС в даному разі створюються АСУ автомагістраллю, зональні АСУ або АСУ дорожнього руху (ДД) міста. В останніх двох випадках більш дієво впровадження мережевих адаптивних методів управління дорожнім рухом. [8]
Однією з організацій, які розробляють схожі системи є компанія ITV. Це російський розробник програмного забезпечення для систем безпеки і відеоспостереження.
Компанія ITV бачить сучасну професійну систему безпеки, як відкриту інформаційну платформу, побудовану за принципом операційної системи, з набором додатків для вирішення найрізноманітніших завдань. Компанія розглядає систему безпеки як інфраструктуру, яка об'єднує все обладнання в єдиний організм і забезпечує узгоджену роботу, застосовуючи сучасні алгоритми інтелектуальної обробки інформації.
У лінійці продуктів ITV є професійні системи для компаній великого масштабу, що використовують принцип відкритої платформи. Прикладом такої системи є
Авто-Інтелект
.
Завдання контролю дорожньо-транспортної обстановки зводиться, фактично, до спостереження за великою кількістю швидко рухомих об'єктів. Людина погано пристосована до такого виду рутинної діяльності, швидко приходить стомлюваність і про повний контроль над дорожньою ситуацією не може йти і мови.
Авто-Інтелект
– рішення для інтелектуального контролю дорожньо-транспортної обстановки і розпізнавання автомобільних номерів.
В основі системи три інтелектуальних модуля:
- модуль розпізнавання автомобільних номерів
- модуль визначення характеристик транспортних потоків
- модуль Радар
Авто-Інтелект
дозволяє збирати статистику по транспортним потокам, допомагає співробітникам ДАИ виявляти випадки порушення правил дорожнього руху,
автоматично визначає наявність пробок. Може використовуватися спільно з системою контролю доступу для автоматизованого контролю проїзду транспортних засобів. [9]
Що стосується автомобілів з системою автопілота, то розвитком цього напрямку займається, наприклад, компанія Яндекс
. Спочатку випробування проводилися на
полігоні,
але вже на початку 2018 року відбулися тести в реальних умовах, на засніжених московських вулицях, а в червні безпілотний Prius проїхав майже 800 км від Москви до
Казані
за 11 годин - результат, порівнянний з реальним водієм. [10]
4. Дослідження ОС Android для розробки програмного модуля
Якщо уявити компонентну модель Android у вигляді деякої ієрархії (малюнок 1), то в самому низу, як найбільш фундаментальна і базова складова, буде розташовуватися ядро операційної системи (Linux Kernel). Часто компонентну модель ще називають програмним стеком. Дійсно, це визначення тут доречно, тому що мова йде про набір програмних продуктів, які працюють разом для отримання підсумкового результату. Дії в цій моделі виконуються послідовно, і рівні ієрархії також послідовно взаємодіють між себою. [11].
Над рівнем Linux знаходиться рівень інфраструктури додатка, що містить віртуальну машину Dalvik і деякі бібліотеки AndroidRunTime(рівня середовища виконання). Dalvik використовує формат Dalvik Executable (*.dex), оптимізований для мінімального використання пам'яті додатком. Це забезпечується такими базовими функціями ядра Linux, як організація потокової обробки і низькорівневе управління пам'яттю.
До складу Android RT входить набір бібліотек ядра, які надають більшу частину функціональності бібліотек ядра мови Java.
Платформа Android включає в себе набір бібліотек, використовуваних різними компонентами ОС. Для розробників доступ до їх функцій реалізований через використання Application Framework. Він дозволяє задіяти всю міць API, використовуваного в додатках ядра. Архітектура побудована таким чином, що будь-який додаток може використовувати вже реалізовані можливості іншої програми за умови, що останнє відкриє доступ на використання своєї функціональності.
На вершині знаходиться рівень додатків. Сюди входить комплект базових додатків: клієнти електронної пошти та SMS, календар, різні карти, браузер, програма для управління контактами та інші. [12]
Рисунок 1 – Архітектура операційної системи Android
(анімація: 6 кадрів, цикл повторень: нескінченно, 128 кілобайт)
Перш ніж приступити до використання програмного модуля системи моніторингу необхідно з'єднатися з апаратною частиною системи. Здійснив дослідження
різних технологій і варіантів підключень бездротових персональних мереж [13], було прийнято рішення використовувати в якості сполучення
організацію PAN–Bluetooth.
Здійснити з'єднання досить просто, для цього всього лише необхідно перейти у вкладку З'єднання
і після системного запиту на включення Bluetooth натиснути кнопку
Підключити пристрій
. Після чого додаток саме підключитися до системи датчиків і нам навіть не варто вибирати з запропонованого списку. Цей процес можна
спостерігати на рисунку 2.
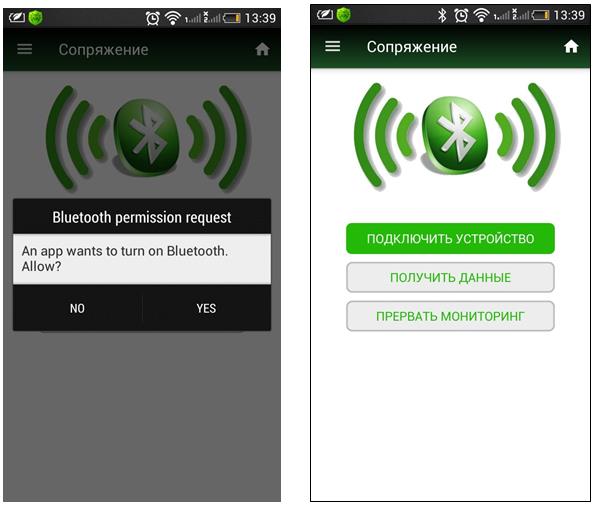
Рисунок 2 – Процес сполучення з системою датчиків
В результаті вдалого сполучення з системою датчиків, кнопки Отримати дані
і Перервати моніторинг
стануть активними. Після того, як користувач натисне
на кнопку,
програма починає посилати запити для отримання показань датчиків. Через встановлений Bluetooth-канал відправляється певний код з періодичним інтервалом,
потім буде отримано відповідь від системи датчиків і у вкладці Моніторинг
нашої програми будуть видані актуальні показання, крім
того з'явиться супровідний напис, що інформує нас про це.
Висновок
Результатом виконання однієї із складових частин магістерської роботи є розроблений програмний модуль системи бездротового оперативного моніторингу, виконаний у вигляді мобільного додатка для пристроїв, що працюють під управлінням операційної системи Android. Розроблене додаток, є важливою ланкою в подальшому проектуванні системи автоматичного пілотування автотранспортними засобами.
При написанні даного реферату магістерська робота ще не завершена. Остаточне завершення: травень 2020 року. Повний текст роботи і матеріали по темі можуть бути отримані у автора або його керівника після зазначеної дати.
Список джерел
- Блог Марка Синната [электронный ресурс] // Wordpress: [сайт]. [2005-2017]. - Режим доступу: https://markfaction.wordpress.com/2012/07/15/stack-based-vs-register-based-virtual-machine-architecture-and-the-dalvik-vm/
- Гейнер, Д. Беспроводные сети. – Вильяме, 2005. – стр.90
- Олифер, В.Г. Компьютерные сети. Принципы, технологии, протоколы / В.Г. Олифер, Н.А. Олифер. – Питер, 2010. – стр.285
- Иванова И. А. Журнал о цифровом видеонаблюдении, IP-решениях, системах безопасности. // Выпуск №3, 2009. - стр.53
- Intelligent Transport Systems in action. Action Plan and Legal Framework for theDeployment of ITS in Europe / Directorate-General for Mobility and Transport ; EuropeanCommission. Luxembourg : Publications Office of the European Union, 2011.
- Benefits of Intelligent Transportation Systems Technologies in Urban Areas: A LiteratureReview. Final Report // Center for Transportation Studies of Portland State University. 2005.April.
- Колодийчук Андрей для блога
ByCars.ru
[электронный ресурс] // ByCars.ru: [сайт]. [2012-2019]. - Режим доступа: https://yandex.ua/turbo?text=https%3A%2F%2Fbycars.ru%2Fjournal%2Fsistemi-avtopilota-dlya-avtomobiley_1760&d=1 - Аникина Б. А. Логистика: /Под ред. Б.А. Аникинаo. — М.: ИНФРА-М, 2007., стр.53
- Кабашкин И. В. Интеллектуальные транспортные системы: интеграция глобальныхтехнологий будущего // Транспорт Российской Федерации. 2010. № 2 (27). - стр. 34—38.
- Беспилотные автомобили: Россия, держись! [электронный ресурс] // auto-rambler: [сайт]. [2018]. Режим доступа: - https://auto.rambler.ru/roadaccidents/41357549-bespilotnye-avtomobili-rossiya-derzhis/
- Голощапов А.Л. Google Android: программирование для мобильных устройств. / А.Л.Голощапов – М. : BHV Санкт-Петербург, 2011. – стр.1549
- Медникс З. Программирование под Android / З. Медникс, Л. Доронин, Б. Мик, М.Накамура. – Питер, 2013
- Уваров Р.В. Телекоммуникационные сети и технологии / Р.В. Уваров, В.К. Скляренко, С.И. Зуев, В.Г. Гулян, А.П. Улеев, А.А. Гринь. – Харьков, 2006. – стр.285