
Реферат за темою випускної роботи
Зміст
- Введення
- 1. Актуальність теми
- 2. Мета і завдання дослідження
- 3. Пристрій і принцип роботи вентильно-індукторного двигуна
- 3.1 Конструктивні особливості ВІД
- 3.2 Принцип дії ВІД
- 3.3 Переваги і недоліки ВІД
- 4. Управління вентильно-індукторним двигуна
- 4.1 Система управління ВІД
- 4.2 Опріділеніе кутів комутації ВІД
- 4.3 Моделювання ВІД
- Висновок
- Список джерел
Введення
Вентильно-індукторний двигун є одним з найстаріших електродвигунів, розроблених в період з 1830 по 1850 рік. Через складність управління він не міг знайти широкого застосування і, таким чином, поступово втрачав свою актуальність до середини 1960 року поки не почався розвиток в області силової електроніки. Це підштовхнуло дослідників до вивчення можливості використання ВІД з більш удосконаленим управлінням. У цьому двигуні крутний момент створюється за рахунок прагнення його деталі, що обертається (ротора) переміщатися в положення, в якому індуктивність збудженої обмотки максимальна.
1. Актуальність теми
З розвитком силової електроніки вентильно-індукторний двигун (ВІД) став конкурентоспроможним вибором для деяких промислових установок в системах управління електричними машинами через свою простоту і міцній конструкції. ВІД мають такі переваги, як простота ротора, висока швидкість роботи, простота ремонту, високий ступінь незалежності між фазами. Приводи ВІД використовуються в аерокосмічних системах, морських силових установках, лінійних приводах, гірських приводах, ручних інструментах і в побутових додатках. Однак основним недоліком ВІД є велика пульсація крутного моменту на низьких швидкостях, яка викликає інтенсивну і небажану вібрацію і акустичний шум і обмежує області застосування ВІД.
В даний час зниження пульсацій крутного моменту в ВІД стало важливою і складною темою досліджень. Пульсація крутного моменту дуже серйозна, особливо на низькій швидкості, що викликає небажану вібрацію і акустичний шум.
2. Мета і завдання дослідження
На основі літературних джерел і досліджень ВІД, вивчити на математичній моделі особливості застосування ВІД для промислових і енергетичних установок. У пакеті Matlab розробити модель і промоделювати робочі режими ВІД.
3. Пристрій і принцип роботи вентильно-індукторного двигуна
3.1 Конструктивні особливості ВІД
Вентильно-індукторного машина може мати різні конструктивні виконання. Як приклад на рис.1 приведена машина 8/6, де 8 це число пар полюсів статора, а 6 – кількість зубців ротора
Рисунок 1 – Поперечний переріз 4-х фазного ВІД з виконанням 8/6
(анімація: 8 кадрів, 116 кілобайт)
ВІД має наступні конструктивні особливості:
- сердечники статора і ротора мають явнополюсную структуру;
- число пар полюсів відносно невелике, при цьому число полюсів статора більше числа полюсів ротора;
- сердечники статора і ротора виконуються шихтованими;
- обмотка статора зосереджена катушечная. Вона може бути одно- або багатофазної;
- фаза ВІД, як правило, складається з двох котушок, розташованих на діаметрально протилежних полюсах статора. Відомі ІМ з подвоєним числом полюсів статора і ротора. Такі електричні машини в 4-х фазному виконанні мають конфігурацію 16/12. Фаза такий ВІД складається з двох пар котушок, які розташовуються на полюсах статора таким чином, що їх осі ортогональні;
- котушки фази можуть бути з'єднані в електричному відношенні паралельно або послідовно, в магнітному - згідно або зустрічно;
- обмотка на роторі ВІД відсутня
На рис.2 приведены ВІД різною конфігураціею.
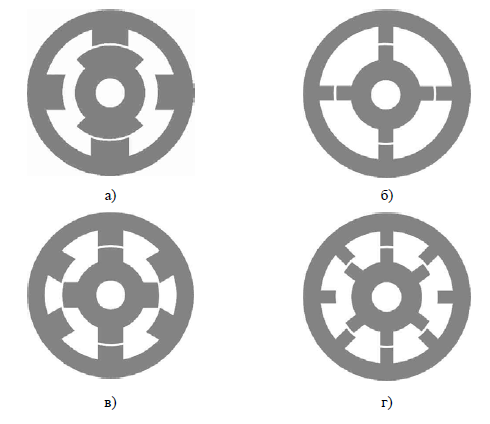
Рисунок 2 – Різні конфігурації ВІД: а - однофазна ІМ конфігурації 2/2; б - двофазна ІМ конфігурації 4/4;
в - трифазна ІМ конфігурації 6/4; г - чотирьохфазна ІМ конфігурації 8/6
Конструктивно ВИД, перетворювач частоти і система управління в ВІП можуть бути виконані окремо. При цьому в процесі роботи вони можуть перебувати на досить великій відстані.
Як і асинхронні машини, в знеструмленому стані ВИД не створюють крутного моменту при обертанні. Залишкова намагніченість часто призводить до невеликого утримує моменту в знеструмленому стані. На низьких швидкостях ВИД перевершують асинхронні машини з точки зору щільності крутного моменту через великої кількості пар полюсів, а на більш високих швидкостях вони явно поступаються. В цьому відношенні вони однозначно поступаються синхронним машинам з постійними магнітами. Високої пульсації крутного моменту, які призводять до сильного шуму, великі розміри двигуна, перешкоджає подальшому поширенню реактивних машин.
3.2 Принцип действия ВІД
Принцип роботи двигуна ВІД досить простий: коли струм проходить через одну з його обмоток статора, крутний момент створюється за рахунок прагнення його ротора поєднуватися з порушеною полюсом статора. Напрямок генерується крутного моменту залежить від положення ротора щодо фази, на яку подається напруга, і не залежить від напрямку потоку в цій конкретній обмотці. Крутний момент можна виконати безперервним, синхронізуючи збудження кожної фазної обмотки з положенням ротора. Струм, що проходить через обмотку ВІД, регулюється відповідним включенням і вимиканням силових електронних перемикачів, які можуть підключати кожну фазу ВРД до шини постійного струму.
На одному валу з електромеханічним перетворювачем (ЕМП) закріплений датчик положення ротора (ДПР). Кожна фаза ЕМП створює крутний момент тільки в певному діапазоні кутів повороту ротора. У цьому діапазоні кутів ДПР виробляє сигнал, який надходить в мікропроцесор і далі, через пристрій, що погодить, в електронний комутатор, який живиться від джерела постійного струму. При надходженні сигналу в електронний комутатор відповідна фаза ЕМП підключається до джерела постійного струму. При виході за межі робочого діапазону кутів повороту ротора подача сигналу ДПР припиняється і відповідна фаза закорачивается сама на себе, а потім підключається до напрузі зворотної полярності. Таке підключення призводить до швидкого спадання струму в фазі до нуля.
Положення зубця ротора, в якому його вісь збігається з віссю зубця статора, називається узгодженим, а положення, в якому вісь зубця статора проходить по осі між двома сусідніми зубцями ротора - неузгоджені. Так для фази А має місце рассогласованное положення (рис.3), а для фази С - узгоджене.
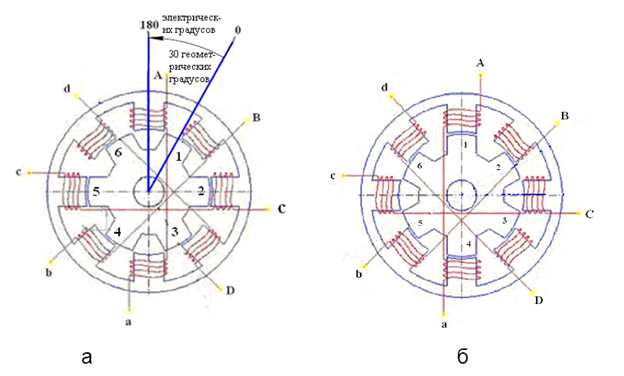
Рисунок 3 – Конструкція четирёхфазного ВИД з співвідношенням чисел пазів 8/6
а) - в неузгоджені положенні щодо зубців фази А;
б) - в узгодженому положенні щодо зубців фази А.
Як правило, вентильно-індукторний двигун має три або більше фаз. але є такоже спеціальні конструкції з двома або однією фазою. Щоб переключітіся в потрібний момент, машина зазвичай оснащується датчиком положення ротора. Існують такоже методи управління без датчика, засновані на струмі статора або моменті.
3.3 Преимущества и недоліки ВІД
Перевага реактивного двигуна полягає в тому, що втрати виникають практично тільки в нерухомому статорі, який, таким чином, можна легко охолоджувати зовні. Конструкція двигуна не вимагає обмоток на роторі і постійних магнітів, а це означає, що можлива проста і надійна конструкція. Отже, реактивні двигуни відповідної конструкції стійкі до короткочасних перевантажень. Завдяки порівняно простий конструкції ротора без котушок або спеціальних матеріалів (Не потрібні постійні магніти і такі матеріали, як рідкоземельні елементи), ротор може бути міцним і надійним. При відповідній конструкції можна допускати перевищення швидкості.
Основним недоліком реактивного двигуна є пульсуючий крутний момент, що особливо важливо, коли кількість полюсів статора невелика. Іншими недоліками є пульсуючі радіальні сили між ротором і статором, які навантажують підшипники і є причиною порівняно високого рівня шуму. Крім того, як і у випадку з асинхронної машиною, для створення обертового поля потрібно реактивний струм. Цей реактивний струм збільшує повну потужність електронних перетворювачів. Складна реалізація системи управління. Для кожного типорозміру двигуна потрібно проектувати свій перетворювач і розраховувати систему управління, що ускладнює впровадження ВІД в промислове виробництво.
4. Управління вентильно-індукторним двигуна
Типова система приводу вентильно-індукторного електродвигуна (ВИД) складається з трьох основних компонентів: силового електронного перетворювача, логічної схеми управління і вентильно-індукторного електродвигуна.
4.1 Система упарвління ВИД
Вентильно індуктивні машини в більшості випадків працюють з регульованою швидкістю. Мал. 4 показана схема регулювання. Силова частина складається з джерела, перетворювача і машини. Як датчики зазвичай потрібно датчик положення ротора і датчик струму обмотки фази.
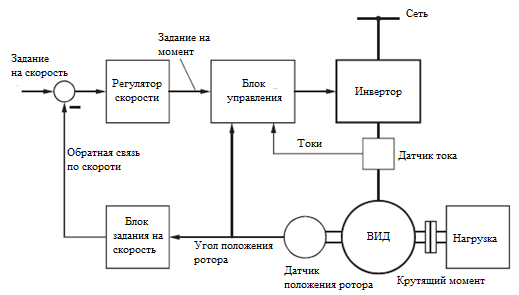
Рисунок 4 – Схема ВІД з системою регулювання швидкості.
Кут повороту визначає швидкість обертання. Відхилення регулювання задає задане значення крутного моменту (дрейф або гальмування). Однак, на відміну від звичайних приводів, в підпорядкованій ланцюга управління струмом крутний момент не може бути безпосередньо відрегульований, тому що струм не є прямим показником крутного моменту. Швидше, крутний момент тільки побічно впливає на амплітуду струму (в нижньому діапазоні оборотів, імпульсний режим) і кути перемикання (особливо на більш високих оборотах, блоковий режим).
Тому відповідну інформацію необхідно зберігати в цифровій пам'яті і витягувати для управління перетворювачем відповідно до поточним робочим станом (В залежності від швидкості обертання і навантаження).
В найпростішому випадку датчик положення ротора може бути реалізований як оптичний датчик, що відображає ротор. Один з можливих варіантів конструкції ВІД з трьома фазами 6/4 показаний на рис. 5
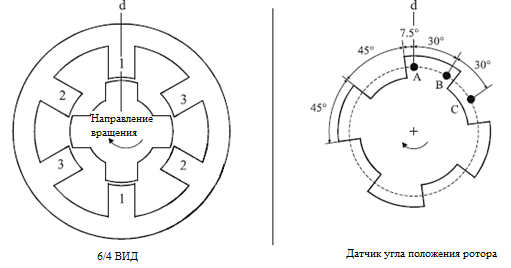
Рисунок 5 – Проста конструкція датчика положення ротора
Диск енкодера має чотири зубці і чотири зазору однакової довжини (45 °), три світлових бар'єру A, B, C розташовані на відстані 30 ° (Електричний 120 °) по колу. Задня кромка вирівняна зі зміщенням 7,5 ° (Електричне 30 °) в положенні d обмотки 1.
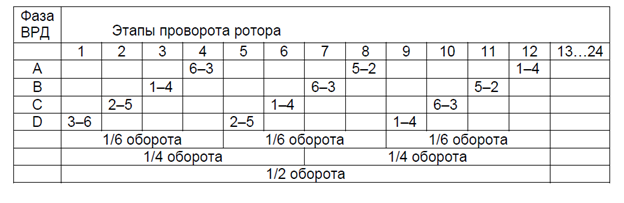
Завдання управління ВРД зводиться до розподілу сигналів управління, що подаються на обмотки статора в необхідній послідовності, а також до включення і відключення обмоток в строго певні моменти часу в залежності від положення ротора.
Таблиця 1 - Ілюстрація обертання ротора ВРД (за годинниковою стрілкою)
Частота обертання ротора залежить від:
- сили магнітного тяжіння, а значить, від струму обмоток;
- гальмівного моменту, прикладеного до ротора. Для стабілізації частоти обертання ротора n у всьому діапазоні робочих навантажень моментів на валу необхідна зворотній зв'язок (ОС) по частоті обертання ротора. Зміна частоти обертання забезпечується регулюванням підводиться до обмоток струму.
- сформувати циклограму комутації обмоток з функцією оптимізації кутів включення і відключення;
- організувати ОС для стабілізації частоти обертання ротора в усьому робочому діапазоні навантажувальних моментів на валу;
- здійснити формування струму в обмотках;
- вибрати оптимальну для даного ВІД силову схему комутатора;
- організувати канал зв'язку з пультом настройки (ПН) для завдання уставок, зміни режимів функціонування та індикації поточних параметрів
4.2 Визначення кутів комутації ВІД
Визначення кутів комутації для отримання максимальної потужності на валу у всьому діапазоні швидкостей.
Щоб знайти кути комутації, що забезпечують максимальний крутний момент на валу і потужність для кожної швидкості. Потім необхідно домогтися сполучення з неперевершеним становищем і номінальним струмом:
Ця магнітна зв'язок повинна бути досягнута в той момент, коли індуктивність починає рости. Тоді час, необхідне для досягнення наростання потоку при додатку напруги BCC, визначається співвідношенням потоку і напруги BCC за вирахуванням падіння напруги на активному фазному опорі. Падіння напруги на активному фазному опорі невелика (по відношенню до напруги DCB), а сила струму зростає, тому це значення можна апроксимувати середнім значенням, яке дозволяє визначити час:
Це час можна виразити через кут випередження комутації, який буде змінюватися разом зі швидкістю обертання електродвигуна:
Вираз дано для режиму переривчастого струму, але струм не обов'язково може бути нульовим, коли потрібно знову включити фазу, щоб досягти номінального струму до моменту початку області збільшення індуктивності. Тоді кут випередження перемикання повинен відслідковувати поточне значення потокозчеплення фази:
Оскільки потік змінюється під час роботи фази, цей кут постійно змінюється, але в якийсь момент стає більше, ніж поточний кут, і фаза повинна бути включена. У цьому випадку максимальний кут випередження комутації не повинен виходити за межі точки А (Рис. 6).
Відключення фази має відбуватися під мінімальним кутом, відповідним початку зони максимальної індуктивності (точка C на рис. 6). В цьому випадку фазний струм повинен встигнути знизитися до 0 до того, як почнеться область з зменшується індуктивністю, інакше буде тенденція збільшення струму в генераторному режимі, що призведе до значного збільшення гальмівного моменту. Формула для розрахунку кута відсічення фази щодо точки B на рис. 6:
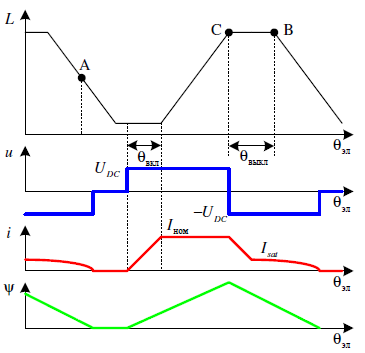
Рисунок 6 – Пояснення до кутів коммутації.
Крім того, повинна бути обмежена ширина зони перемикання фаз, яка в статиці не повинна перевищувати 180 ° ;. Можливо невелике перевищення для компенсації падіння напруги на активному опорі обмотки
4.3 Моделювання ВІД в пакеті Matlab
Модель ВІД 8/6 побудована в Matlab/Simulink показана на рис. 7. Розроблено додаткові елементи управління з ПІ регулятором для підвищення продуктивності вентильно-індукторного двигуна.
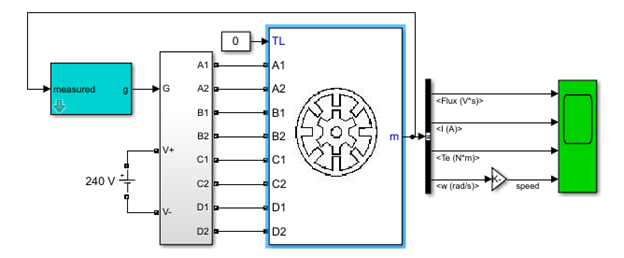
Рисунок 7 – Модель ВІД 8/6 в пакеті Matlab.
Потоки чотирьох фаз статора показані на рис. 8. Індукція потоку насичується в точці, де швидкість стає постійною. Спочатку, коли двигун запускається, він споживає великий струм, пропорційний моменту, що крутить.
Результати моделювання
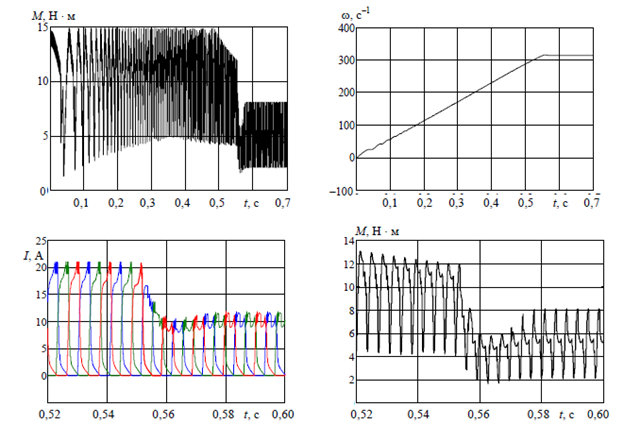
Рисунок 8 – Графіки перехідних процесів ВІД.
Висновки
Розроблена імітаційна модель дозволяє досліджувати електромагнітні та електромеханічні процеси в вентильно-індукторних привід, а також аналізувати різні методи управління. Поліпшення продуктивності ВІД досягається при застосуванні ПІ регулятора. За допомогою цих методів можна проаналізувати широкий діапазон кутів включення і виключення замість звичайних двох значень кутів для включення і виключення. Запропонована схема управління не тільки збільшує ефективність ВІД, але і забезпечує широкий діапазон вибору значень струму.
Список джерел
- Krishnan, R. Switched reluctance motor drives: modeling, simulation, analysis, design, and applications. / R. Krishnan. – Magna Physics Publishing, 2001. – 416 p.
- Киреев, А.В. Вентильно-индукторные электроприводы для подвижного состава. / АкадемЛит, 2011. – 340 с.
- Рымша В.В. Усовершенствованная цепно-полевая модель вентильно-реактивного двигателя. / Електротехніка і Електромеханіка. – 2010. – No 5. – С. 24–26.
- Petrushin A.D. Optimizatsiya aktivnoy chasti ventil'no-induktornogo elektroprivoda / Vestnik RGUPS. - 2016. - No 1(61). - S. 61-65.
- Козаченко, В. Цифровое векторное управление вентильно-индукторными двигателями с независимым возбуждением / Компоненты и технологии– 2004. – No 8. – С.50-55. .
- Sahoo N.C., Xu J.X.et al. Determination of current waveforms for torque ripple minimization is switched reluctance motors using iterative an investi-gation/ No 4. PP. 369-377. .
- Ю.А. Голандц Вентильные индукторно-реактивные двигатели – Спб: ГНЦ РФ – ЦНИИ «Электроприбор», 2003. – 148 с.
- Жарков, A. A. Датчики положения ротора для вентильно-индукторного электропривода с векторным управлением / Электричество. – 2008. – No 5. – С. 36–41
- Кузнецов В.А., Определение вращающего момента вентильно-индукторного двигателя / Электротехника, электромеханика и электротехнологии: Сб. тр. четвертой межд. конф. 18-22 сентября 2000 г. Клязьма, 2000. – С.338-339.
- Сергеев, Ю.С. Приводы вибрационных машин на базе вентильно–индукторных двигателей: диссертация на соискание ученой степени кандидата технических наук / ЮУрГУ, 2011. – 208 с.