Аннотация
Голландцев Ю.А. Сравниваются механические характеристики асинхронных двигателей с короткозамкнутым ротором и вентильных индукторных двигателей, предназначенных для применения в системах автоматического управления. Обсуждаются результаты сравнения характеристик и даются рекомендации по выбору двигателей.
Обзор используемых электродвигателей
В настоящее время в системах автоматического управления в основном используются асинхронные двигатели (АД) с короткозамкнутым ротором, вентильные двигатели (ВД) с возбуждением от постоянных магнитов и значительно реже шаговые и вентильные индукторно реактивные двигатели (ВИРД).
Отлаженная автоматизированная технология производства, низкая стоимость и широкая номенклатура выпускаемых двигателей являются основными причинами широкого использования АД в регулируемом и нерегулируемом электроприводе. К недостаткам АД можно отнести относительно малый воздушный зазор, повышенные тепловые потери в обмотках ротора и статора, а также сложные алгоритмы частотного и векторного управления частотой вращения и моментом. Однако с появлением доступных микропроцессорных средств, которые позволяют реализовать практически любые алгоритмы управления АД, последний недостаток может рассматриваться с позиции надежности работы предложенных алгоритмов управления в режиме реального времени.
Номенклатура выпускаемых синхронных двигателей с возбуждением от постоянных магнитов и, соответственно, ВД, построенных на их базе, очень ограничена. К основным достоинствам ВД относятся высокие энергетические показатели и линейные алгоритмы управления, а недостатки определяются необходимостью установки датчика положения ротора, наличием постоянных магнитов и сложной технологией изготовления ротора, содержащего постоянные магниты. Наилучшими удельными энергетическими показателями обладают ВД с постоянными магнитами, намагниченными радиально [1].
Во многих системах автоматики применяются безредукторные схемы электропривода, в которых используются двигатели с низкими номинальными частотами вращения. Естественные конструктивные ограничения на выполнение многополюсных синхронных двигателей объясняют появление комбинированных двигателей, у которых зубчатые пакеты на роторе чередуются с кольцевыми магнитами, намагниченными в аксиальном направлении, а статор имеет явно выраженные полюса, на которых выполнены мелкие зубцы [2. Эти двигатели обладают повышенным коэффициентом электромагнитной редукции частоты вращения и приемлемыми энергетическими показателями, но при этом относительно большим остаточным моментом при обесточенных обмотках и наибольшей трудоемкостью изготовления из всех известных типов двигателей.
К классу ВД относятся и ВИРД, которые постепенно отвоевывают себе «место под солнцем», особенно в тех позициях, где наиболее ярко проявляются их достоинства и не играют существенной роли их недостатки. Достоинства ВИРД определяются простой технологичной конструкцией (прямые зубцы на статоре, катушечные обмотки, зубчатый безобмоточный ротор); отсутствием тепловых потерь в роторе; наличием коэффициента электромагнитной редукции; минимальным моментом инерции ротора; отсутствием «реакции якоря» и остаточного момента при обесточенных обмотках; высоконадежными схемами вентильных коммутаторов и низкой трудоемкостью изготовления. К недостаткам ВИРД следует отнести минимально возможный воздушный зазор, зависимость параметров двигателя от тока нагрузки и угла поворота ротора, повышенное энергопотребление и тепловыделение в пусковом режиме [3].
Сравнение характеристик двигателей, имеющих различные принципы создания момента, при разработке регулируемого электропривода представляет сложную многокритериальную задачу, приемлемое решение которой возможно только для конкретного привода. Каждый тип двигателя, очевидно, соответствует определенному классу регулируемых механизмов и условиям эксплуатации, для которых наиболее ярко проявляются его достоинства и «приглушаются» недостатки конкретного типа двигателя.
Многие известные результаты сравнений двигателей носят субъективный характер и отражают личные позиции авторов. Большинство из предлагаемых критериев сравнения оценивают показатели двигателей в некоторой расчетной точке, соответствующей либо пусковому режиму работы, либо номинальному [2] . Очень часто технические данные, приводимые в статьях, рекламных и справочных материалах, не позволяют объективно оценить возможности двигателей. При этом возникает проблема приведения сравниваемых двигателей к единому скалярному базису, в состав которого должны входить технические и эксплуатационные показатели, а также трудозатраты на изготовление двигателей в зависимости от объема выпуска. В качестве критерия сравнения двигателей, характеризующихся различными принципами действия и конструкциями, предлагается использовать естественные механические характеристики с учетом теплового режима работы.
Сравнение естественных механических характеристик АД и ВИРД.
Кроме технологичности конструкций, АД и ВИРД объединяет еще один признак — наличие одного источника электрической энергии; независимого потока возбуждения в двигателях — нет. В АД трехфазное напряжение питания создает вращающееся магнитное поле в воздушном зазоре, которое взаимодействует с током, протекающим в короткозамкнутой обмотке ротора под действием наведенной ЭДС. Вращающееся магнитное поле в ВИРД взаимодействует с ротором, имеющим явную магнитную асимметрию по расточке статора по эквивалентным осям d и q. Следует заметить, что принцип формирования момента в АД обладает большей эффективностью по сравнению с принципом, реализованным в ВИРД. В АД момент на валу пропорционален электрическим потерям в роторе, поэтому температура нагрева обмоток ротора и статора близка к максимально допустимой температуре изоляции обмотки статора. В ВИРД ротор практически холодный, тепловая нагрузка двигателя определяется электрическими потерями в обмотке статора. Для повышения энергетических показателей в АД и ВИРД воздушный зазор выбирается минимально возможным и ограничивается уровнем технологии и условиями эксплуатации.
В качестве исходного двигателя выберем трехфазный АД с короткозамкнутым ротором мощностью 13 кВт и синхронной частотой вращения
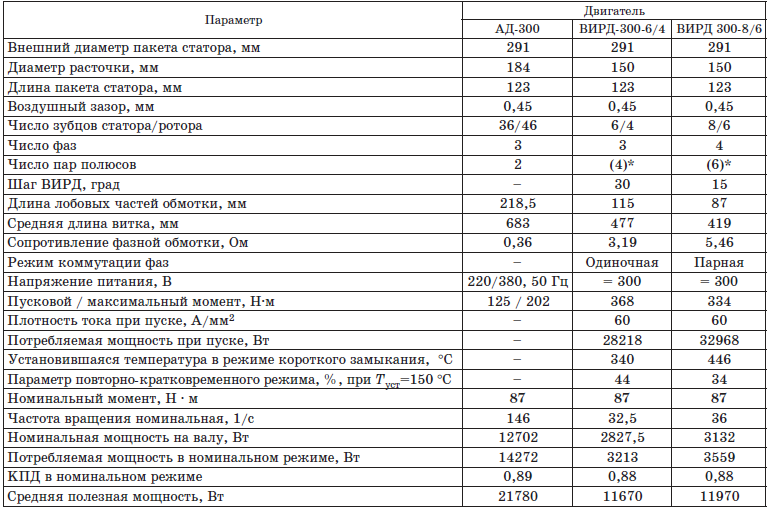
150 1/с, расчет которого приведен в работе [4]. При сохранении внешних габаритных размеров АД спроектировано два ВИРД, различающихся числом фаз и соотношением зубцов статора / ротора. Параметры рассчитанных двигателей приведены в таблице. АД и ВИРД отличаются диаметром расточки, числом пар полюсов, которое в ВИРД равно числу зубцов ротора. Напряжение питания обмоток АД — 220/380 В, 50 Гц, а напряжение питания обмоток ВИРД — 300 В постоянного тока. Кроме того, трехфазный ВИРД–300–6/4 рассчитан на режим одиночной коммутации фаз, когда каждая фаза проводит ток в течение 120 эл. град. В четырехфазном ВИРД–300–8/6 реализована парная коммутация, при которой ток проводят две фазы в течение 180 эл. град.
Рабочие характеристики ВИРД–300–6/4 и ВИРД–300–8/6, к которым относятся: полезная мощность на валу P2 = f(Mнг), потребляемая мощность Pп = f(Mнг), электромагнитный КПД, учитывающий только электрические потери в обмотке: КПД = f(Mнг) — представлены на рис. 1. Максимальная мощность на валу ВИРД имеет место при больших моментах нагрузки при условии сильного насыщения магнитной цепи двигателя. Максимальный КПД в ВИРД существует при малых моментах нагрузки и частотах вращения, близких к холостому ходу, когда эквивалентный, фиктивный поток возбуждения становится максимальным.
Механические характеристики ВИРД соответствуют характеристикам двигателя постоянного тока c последовательным возбуждением с ослабленным потоком. Величина фиктивного магнитного потока возбуждения в ВИРД лежит в диапазоне: Φf = (0,25–0,5)ФW, где ФW — магнитный поток, созданный обмоткой. Режим работы приводного механизма определяет выбор расчетной точки на механической характеристике ВИРД, от значения которой зависит тепловой режим статора, степень насыщения магнитной системы двигателя и вид механической характеристики. Вид механической характеристики ВИРД можно сформировать за счет выбора способа соединения катушечных обмоток в фазу и режима коммутации фаз [5]. Типовые механические характеристики ВИРД в относительных единицах приведены на рис. 2. Режим парной коммутации фаз обеспечивает форсирование пускового момента по сравнению с одиночной коммутацией и может быть реализован в двигателях, имеющих число фаз больше трех.
- Параметры двигателей АД–300, ВИРД–300–6/4 и ВИРД–300–8/6
Различаем три возможных режима работы приводных механизмов, для которых выбираются следующие расчетные точки:
- двигатели, предназначенные для длительной работы в заторможенном режиме, рассчитываются для долговременной работы в пусковом режиме, максимальное значение пускового момента определяется допустимой температурой изоляции обмотки в установившемся режиме работы, максимальное значение индукции, близкое к индукции насыщения стали, имеет место в коронке зубца статора, КПД двигателя — низкий, механическая характеристика — «мягкая» (кривая 1 на рис. 2);
- двигатели, предназначенные для привода тяговых механизмов, должны создавать форсированный момент в повторно– кратковременном режиме работы, величина которого определяется допустимой температурой изоляции обмотки в форсированном режиме, при этом зубцы статора полностью насыщены, КПД двигателя — средний; механическая характеристика — «жесткая» в зоне низких частот вращения и больших моментов нагрузки (кривая 2 на рис. 2);
- двигатели, предназначенные для длительной работы в фиксированном диапазоне частот вращения; рассчитываются на номинальный момент, равный
MN = (0,2–0,3)Mпуск, прямой пуск данных двигателей осуществляется при ограничении потребляемого тока; в режиме пуска зубцы и спинка статора сильно насыщены; КПД двигателей — высокий; механическая характеристика является «жесткой» в требуемом диапазоне частот вращения (кривая 3 на рис. 2).
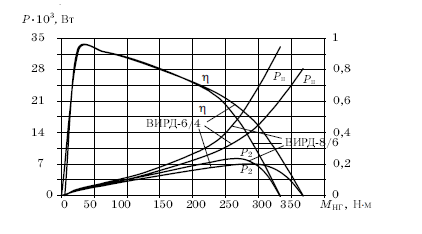
Рисунок 1 - Рабочие характеристики ВИРД–300–6/4 и ВИРД–300–8/6;
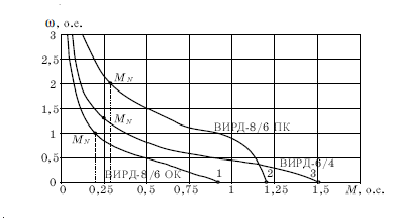
Рисунок 2 - Типовые механические характеристики ВИРД
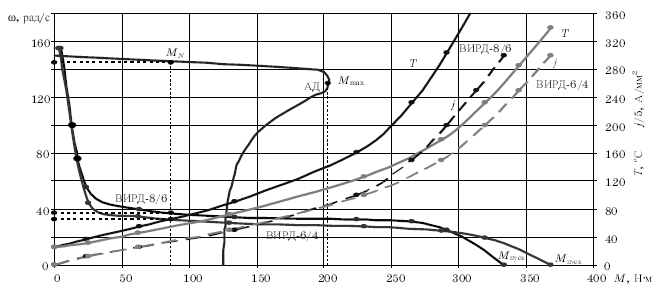
Рисунок 3 - Механические характеристики двигателей АД–300 и ВИРД–300–6/4, ВИРД–300–8/6
Механические характеристики АД300 и ВИРД–300–6/4, ВИРД–300–8/6, а также зависимости плотности тока и температуры обмотки ВИРД от момента нагрузки
J = f(Mнг), T = f(Mнг) показаны на рис. 3. Сравнение приведенных характеристик АД (2p = 2) и ВИРД, выполненных в одних габаритах, показывает, что ВИРД может быть конкурентоспособным с АД, имеющим повышенное число пар полюсов (2p = 4 и более), из–за естественного коэффициента электромагнитной редукции частоты вращения, характерного для ВИРД. В АД при 2p = 8 синхронная частота вращения Wс =37,5 1/с, что соответствует основному диапазону частот, спроектированных ВИРД (см. рис. 3).
Среднее значение полезной мощности на валу двигателей может быть использовано в качестве критерия сравнения их механических характеристик. Вы численные значения полезной средней мощности, приведенные в таблице, подтверждают сказанное о том, что при снижении синхронной частоты вращения в АД в два раза среднее значение полезной мощности будет соизмеримо полезной средней мощности на валу ВИРД.
Список использованной литературы
1. Жуков В. П., Нестерин В. А. Высокомоментные вентильные электродвигатели серии 5 ДВМ / Электротехника. 2000. № 6. C. 19–21.
2. Демагин А. В. Электрические машины для непосредственного привода приборных систем / ЦНИИ «Румб». Л., 1991. 80 c.
3. Голландцев Ю. А. Вентильные индукторно реактивные двигатели / ГНЦ РФ — ЦНИИ «Электроприбор». СПб., 2003. 150 с.
4. Сергеев П. С., Виноградов Н. В., Горяинов Ф. А. Проектирование электрических машин. М.: Госэнергоиздат, 1969. 632 с.
5. Голландцев Ю. А. Механические характеристики вентильных индукторно реактивных двигателей / Изв. вузов. Сер. Приборостроение. 2005. Т. 49.№ 7. С. 51–55.