Аннотация
Карпович О.Ю., Марченко А.А., Онищенко О.А. Оценка влияния управляющих воздействий на механические характеристики вентильно-индукторного электропривода. На основе разработанной авторами модели вентильно-индукторного электропривода выполнен анализ влияния углов включения фаз, напряжения и уставок токоограничения на характер изменения механических характеристик, форму тока и уровень пульсаций момента вентильно-индукторного двигателя. В результате исследований установлено, что эффективными, с точки зрения снижения уровня пульсаций момента на низких скоростях, являются алгоритмы управления, осуществляющие одновременное воздействие на углы коммутации, напряжение питания и уровень токоограничения в зависимости от текущей скорости двигателя.
Постановка проблемы
Вентильно-индукторный электропривод (ВИП) – современный, теоретически не полностью исследованный электропривод [1-3]. Он начинает применяться во многих типах промышленных и бытовых механизмов, а также в судовых электроэнергетических системах и установках. ВИП отличается от других типов электроприводов наличием нескольких дополнительных управляющих воздействий, определяющих его основные статические, динамические и энергетические свойства [1,2]. К этим воздействиям относятся:
- а) углы коммутации фаз, определяющие моменты времени переключения напряжения от одной фазы двигателя к другой (включения и отключения фазы);
- б) уставки уровня ограничения тока фаз;
- в) уровни постоянного напряжения, подводимого к фазам.
Как отмечено в [3], гибкое, меняющееся в зависимости от условий работы ВИП формирование углов коммутации фаз позволяет создавать более совершенные, отличающиеся от известных алгоритмы управления электроприводом. Такие алгоритмы, реализуемые с помощью микро-процессорной техники, существенно улучшают механические и энергетические характеристики ВИП, а выбор рационального соотношения между указанными выше воздействиями позволяет оптимизировать комплекс характеристик ВИП при его работе под нагрузкой [4].
Цели и задачи
Целью данной статьи является оценка влияния различных управляющих воздействий на механические характеристики ВИП, а также анализ возможных алгоритмов управления, осуществляющих одновременное воздействие на углы коммутации фаз, напряжения и уровни токоограничения в зависимости от текущей скорости вентильно-индукторного двигателя (ВИД).
Проводим такую оценку с помощью разработанной в [5] имитационной модели ВИП. В этой системе управления нет отрицательной обратной связи по скорости и применен одиночный симметричный режим коммутации ключей инвертора (частота 3,3 кГц при номинальном напряжении источника питания 280 В). Кроме того, с целью ускорения расчетов использован контур тока на основе «гибридной быстрой» модели [6] с коэффициентом обратной связи по току 0,45 В/А.
Исследование влияния на механические характеристики (МХ), форму тока и момента ВИД проведено для:
- опережающего на 2° угла включения фаз (θon(оп) = 6°) относительно базового угла включения (θon(б) = 8°);
- отстающего на 2° угла включения (θon(отс) = 10°) относительно базового угла включения (θon(б) = 8°);
- изменения уставки токоограничения для базового, отстающего и опережающего углов включения фаз;
- уменьшения напряжения источника питания для базового угла включения фаз.
Угол отключения фаз во всех случаях принят неизменным – (θoff = 23°, а начальный (базовый) угол включения равен 8°. Зависимость изменения индуктивности для одной из фаз двигателя в функции углового положения ротора приведена на рис. 1.

Рисунок 1 – Изменение индуктивности, тока и формирование углов включения/отключения для одной фазы
Как показано на рис. 1, ширина импульса для базового угла управления, коммутирующего ключи инвертора, равна Тk = 23°-8° = 15°, что соответствует ширине зубцов ротора исследуемого ВИД.
Из анализа графиков, иллюстрирующих формирование импульсов управления (базовый угол, период включения фазы Тв) для всех четырех фаз (рис. 2) двигателя, следует, что исходным при моделировании необходимо принять близкое к рассогласованному состоянию положение ротора ВИД.
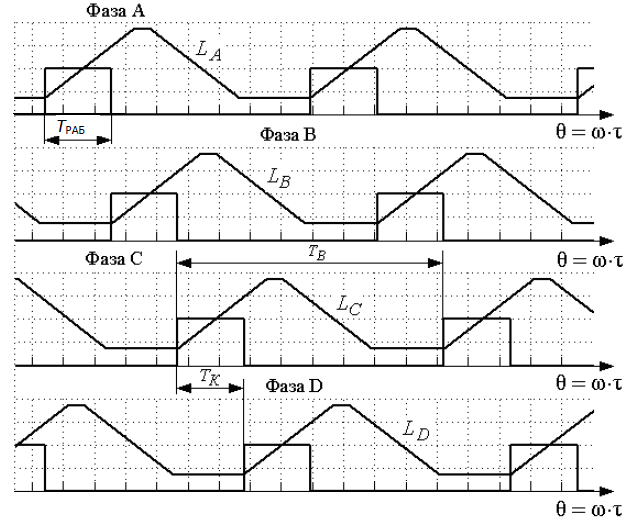
Рисунок 2 – Одиночная симметричная коммутация для ВИД конфигурации 8/6
Механические и регулировочные характеристики ВИД при базовых углах включения θon(б) = 8° и отключения θoff = 23° фазы, уровне токоограничения 6,67 А приведены на рис. 3 и 4 соответственно. Из приведенных на рис. 4 регулировочных характеристик следует, что поскольку зависимости ω = f (Ud) практически линейны, то для стабилизации частоты вращения при изменениях статического момента необходимо изменять напряжение источника Ud пропорционально нагрузке. Например, в тех случаях, когда в процессе эксплуатации у источника питания снижается напряжение, это позволит сформировать соответствующие корректирующие воздействия.
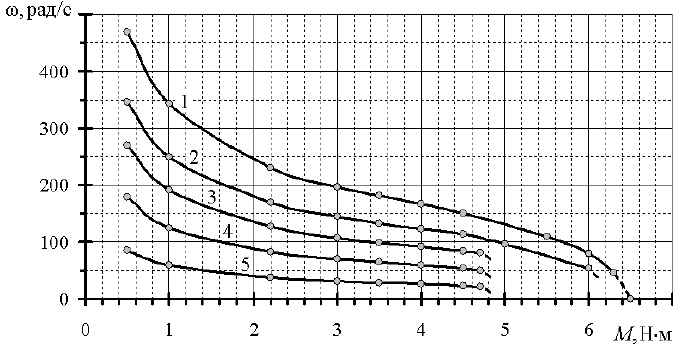
Рисунок 3 – Механические характеристики ВИД при различных напряжениях источника питания Ud:
1 – 280 В (номинальное напряжение); 2 – 224 В (80% номинального);
3 – 168 В (60%); 4 – 112 В (40%); 5 – 56 В (20%)
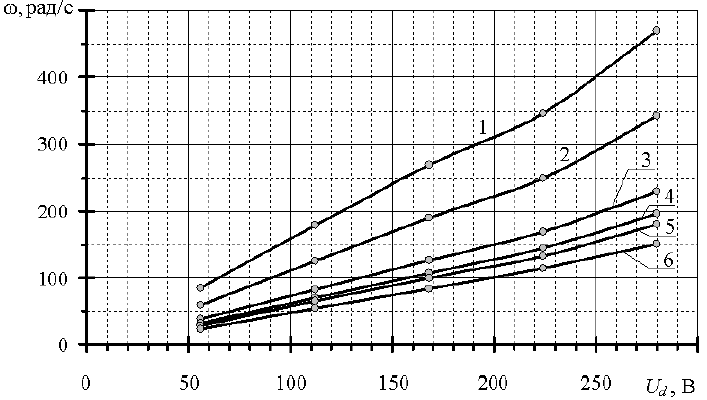
Рисунок 4 – Регулировочные характеристики ω = f (Ud) при базовых углах включения θon = 8°
и отключения θoff = 23° фаз, токоограничении на уровне 6,67 А и фиксированных моментах сопротивления:
1 – Мc = 0,5 Н·м; 2 – Мc = 1 Н·м; 3– Мc = 2,2 Н·м; 4 – Мc = 3 Н·м; 5 – Мc = 3,5 Н·м; 6 – Мc = 4,5 Н·м
Таким образом, для регулирования скорости ВИД с обеспечением постоянства момента можно воспользоваться пропорциональным законом управления
Udd / ω ≈ const, соответствующим зависимости М.П. Костенко для управления асинхронными электродвигателями.
Графики изменения токов в фазах двигателя при различных углах управления и статических нагрузках представлены на рис. 5.
Графики изменения результирующего момента ВИД при нагрузках 1 Нм, 4 Нм, 6,3 Нм, 5,5 Нм и различных углах управления фазами приведены на рис. 6.
Анализ полученных результатов, в частности, показывает, что при опережающем угле включения (θon(оп)) участки токоограничения начинаются при меньших значениях момента. Это связано с тем, что токоограничение начинает свое действие с участка, когда dL/dθ = 0 (см. рис. 1) и момент практически не развивается [1], поскольку

Как видно из рис. 5, а, при малых значениях статической нагрузки (на высоких скоростях) токоограничение отсутствует при любых углах коммутации, а из рис. 5, б (при базовом и отстающем углах) и рис. 5, в следует, что с момента нагрузки Mc = 4 Нм токоограничение начинает свое действие, тогда как при опережающем угле (рис. 5, б) ограничения тока еще нет.
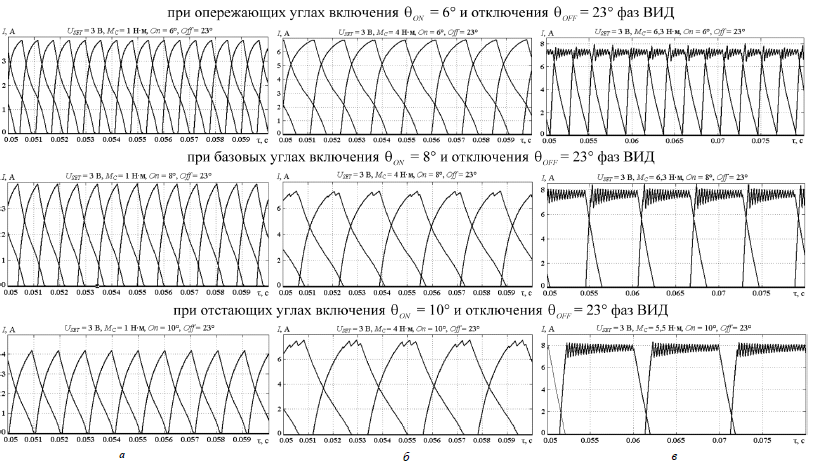
Рисунок 5 –Графики токов в фазах ВИД при различных углах управления фазами:
опережающем θon(оп) = 6° базовом θon(б) = 8° отстающем &thetaon(отс) = 10° и
статических нагрузках: а – Mc = 1 Н·м; б – Mc = 4 Н·м ; в – Mc = 6,3 Н·м и Mc = 5,5 Н·м
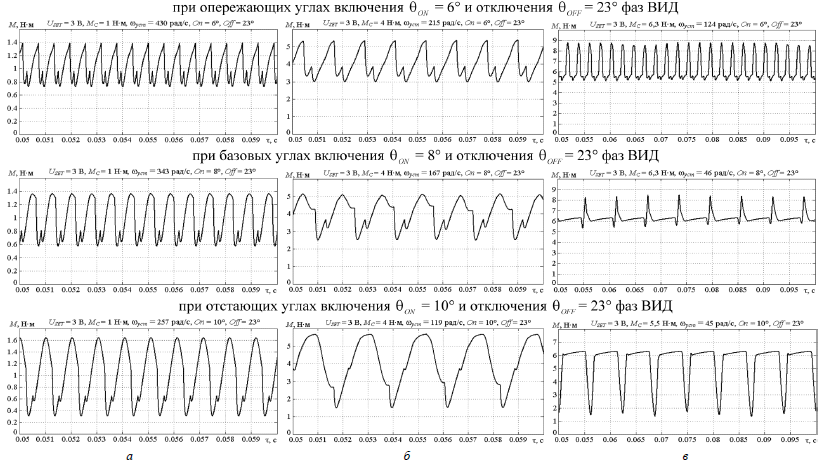
Рисунок 6 – Графики изменения результирующего момента ВИД при различных углах управления фазами:
опережающем θon(оп) = 6° базовом θon(б) = 8° отстающем θon(отс) = 10°
и статических нагрузках: а – Mc = 1 Н·м; б – Mc = 4 Н·м ; в – Mc = 6,3 Н·м и Mc = 5,5 Н·м
Это связано с тем, что при таком угле включения МХ находятся выше остальных. При отстающем угле включения МХ опускаются вниз, что определяет невозможность работы ВИД при больших статических нагрузках (более 5,5 Нм). Отмеченные эффекты объясняются с помощью рассмотрения участков изменения тока относительно индуктивности фазы (см. рис. 1). Напри-мер, при отключении фазы при угле θoff на участке θoff … θ2 создается движущий момент, поскольку индуктивность фазы продолжает увеличиваться и при низких скоростях протяженность участка θoff … θ2 уменьшается, приводя к снижению результирующего момента; на участке θ2 … θ3 момент нулевой, поскольку индуктивность фазы не изменяется; на участке θ2 … θ3 фаза двигателя создает тормозной момент, так как приращение индуктивности фазы отрицательное.
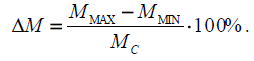
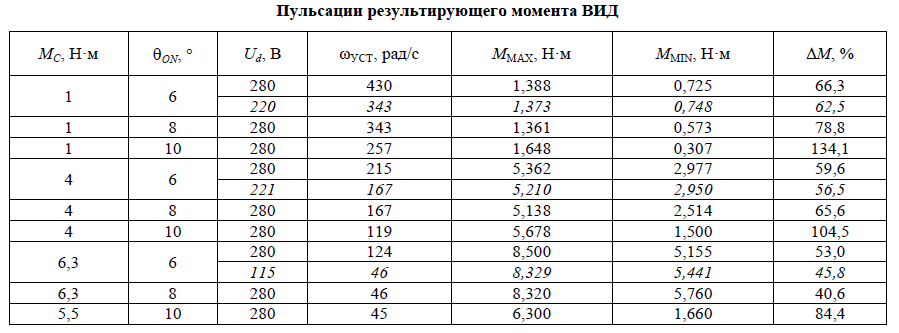
Амплитуды пульсаций результирующего момента ВИД при различных статических нагрузках и углах управления фазами рассчитаны по выражению:
Результаты расчетов приведены в таблице. Анализ ее данных показывает, что наименьшая амплитуда пульсаций электромагнитного момента достигается в диапазоне высоких и средних скоростей при опережающем угле включения, а наибольшая – при отстающем. На низких скоростях (при больших статических нагрузках) амплитуда пульсаций становится меньше уже при базовом, а не при опережающем угле включения.
Очевидно, что в диапазоне высоких и средних скоростей для получения наименьшего значения амплитуды пульсаций результирующего момента ВИД необходимо работать с опережающим углом включения, снижая при этом напряжение источника Ud до значения, соответствующего той скорости, которая была бы при базовом угле включения.
Анализируя результаты влияния углов включения фаз, напряжения и уставок токоограничения на характер изменения механических характеристик и форму тока, можно утверждать, что эффективными, с целью снижения уровня пульсаций момента на низких скоростях (см. рис. 6), являются алгоритмы управления, осуществляющие одновременное воздействие на углы коммутации, напряжение Ud и уровень токоограничения в зависимости от текущей скорости ВИД. Дополнительной, здесь не рассмотренной, возможностью управления ВИП является изменение углов отключения фазы привода. Таким образом, установлены дополнительные возможности оптимизации алгоритмов управления ВИП при сохранении максимального момента ВИД.
Список использованной литературы
1. Krishnan R. Switched reluctance motor drives. – CRC Press, 2001 – 398 p.
2. Miller T.J.E. Switched reluctance motors and their control. – Oxford: Magna Physics Publishing and Clarendon Press, 1993. – 205 p.
3. Влияние параметров коммутации на характеристики вентильно-реактивного электропривода / И.Н. Радимов, В.В. Рымша, З.П. Процына, М.В. Гулый // Электромашиностроение и электрооборудование. – 2006. – Вып. 67. – С. 82–87.
4. Determination of optimum switching angles for speed control of switched reluctance motor drive system / Hamid Ehsan Akhter et al. // Indian Journal of Engineering and Materials Sciences, 2004. – Vol. 11(3). – P.151–168.
5. Карпович О.Я, Онищенко О.А. Компьютерное исследование динамических свойств вентильно-индукторного двигателя // Электротехника и электромеханика. – 2003. – № 4. – С. 42–45.
6. Карпович О.Я., Онищенко О.А. Разработка моделей с упрощенными контурами тока для вентильно-индукторного микроэлектропривода // Вестник НТУ «ХПИ». Проблемы автоматизированного электропривода. Теория и практика. - 2004. – № 43. № С. 91–94.