Аннотация
Чихняев В.А., Ахметзянов Д.И. Исследование электромеханических свойств вентильно-индукторного двигателя Рассмотрены различные алгоритмы управления фазами вентильно-индукторного двигателя (ВИД). С помощью математической модели ВИД получены результаты исследования работы двигателя при трех алгоритмах управления. Определены наиболее благоприятные углы коммутации ВИД.
Постановка проблемы
Одним из наиболее динамично развивающихся типов электромеханических преобразователей энергии являются вентильно-индукторные двигатели. Они отличаются от других типов электроприводов наличием управляющих воздействий, определяющих не только установившийся режим работы, но и динамические и энергетические показатели привода. Рациональный подбор алгоритмов управления и их взаимосвязь с выходными данными ВИД (скорость, момент и т.д.) требует определения критерия оптимизации, условий и ограничений.
Цели и задачи
Целью данной статьи является компьютерная оценка влияния алгоритма управления, углов управления на электромеханические свойства и характеристики ВИД.
Известны [1] три вида алгоритмов управления фазами индукторной машины (ИМ): одиночный симметричный, парный симметричный и несимметричный. Все виды алгоритмов могут быть применены только для двигателей с количеством фаз m ≥ 4. Для ИМ меньшей фазности используется только одиночный симметричный режим.
Оборот ротора разбивается на равные угловые зоны. Число угловых зон определяется делением 360° на период включенного состояния vk фаз для геометрических угловых размеров, а для электрических размеров – можно разделить на число фаз, что также определяет число зон включенного состояния vk за один цикл работы двигателя.
Формулы, определяющие период включенного состояния vk фаз ВИД, можно записать так:
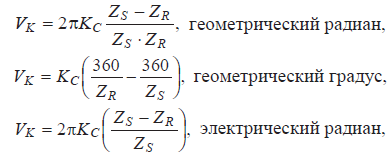
где ZS и ZR – число зубцов статора и ротора, Kc – коэффициент несимметрии включенного состояния фаз, пределы изменения которого 1 ≤ Kc ≤ 2.
При Kc = 1 имеем одиночный симметричный алгоритм управления, при Kc = 2 – парный симметричный алгоритм, при 1 < Kc < 2 – несимметричный алгоритм, угловое состояние которого меняется в указанных пределах.
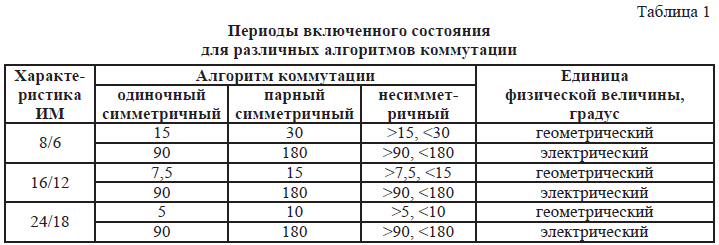
Для примера согласно формуле (1) периоды включенного состояния vk четырех фазного ВИД для известных алгоритмов даны в табл.
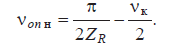
Есть понятие нейтральной коммутации [2], когда при постоянном токе в обмотках фаз момент на краях вне коммутационного периода одинаков М(0) = М(Vk). Начальный угол включения нейтральной коммутации определяется как.
Момент, созданный пондеромоторными силами от взаимодействия магнитодвижущей силы обмотки статора с зубцами ротора, находится как
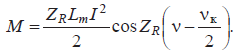
где Lm=(Ld-Lq)/2; Ld и Lq – индуктивности в согласованном и рассогласованном положении зубцов статора и ротора активных фаз индукторной машины; I – ток фазы двигателя; ν – текущее значение угла поворота ротора.
Исследования ВИД проводили на модели [4] с применением пакета MatLab, используя мгновенные значения переменных. Была получена система неизменной структуры линейная на каждом шаге расчета и наиболее полно отвечающая физическим особенностям индукторной машины и преобразователя частоты, коммутирующего обмотки фаз. Основные параметры исследуемого четырехфазного ВИМ: источник питания 200 В, момент инерции 0,01 кГм2 , момент сопротивления на валу 5 Нм. Для подсчета среднего электромагнитного момента за цикл работы двигателя и определения величины его пульсации (коэффициент пульсаций Kпул) применялись следующие формулы[3]:
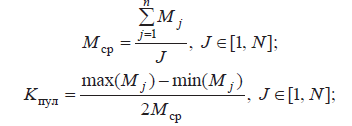
где max(Mi) – максимальный момент за цикл работы; min(Mi) – минимальный момент за цикл работы; N – количество точек интегрирования.
Проведены исследования работы двигателя в установившихся режимах для трех алгоритмов управления. Фиксировались критические точки суммарного момента М и фазных моментов Ma, Mb, Mc, Md, ток двух фаз Ia, Ib и средняя установившаяся скорость ωcp вращения вала двигателя.
На рис. 1 показан фрагмент работы ВИД в установившемся режиме при управлении его одиночным симметричным алгоритмом Kc = 1 и нейтральной коммутации νon.н График суммарного электромагнитного момента существенно отличается от нейтрального. На эту кривую влияют моменты, созданные при гашении поля отключаемых фаз. Их отрицательные значения являются тормозными, вызывают негативные последствия, что весьма нежелательно для ВИД. Эффект тормозного момента наступает, если ток отключаемой фазы и момент не уменьшились до нуля при наступлении согласованного положения зубца статора и ротора. Это ведет к уменьшению среднего электромагнитного момента двигателя и увеличению его пульсаций за цикл работы ИМ. Наличие тормозных моментов фаз можно увидеть и по кривой суммарного электромагнитного момента М двигателя – это скачки в названном графике (рис. 1).
Возникает вопрос, какой угол управления νon.б взять за базовый? Критерием оптимальности базового угла является получение среднего момента за цикл работы ИМ при наименьшем уровне пульсации. Для этого необходимо стремиться к тому, чтобы ток уменьшился до нуля при достижении согласованного положения зубцов статора и ротора, только тогда получим оптимальный процесс преобразования энергии. Определить и заранее рассчитать угол отключения νoffфазы довольно сложно. Он будет зависеть от постоянной времени спадания тока и обратного напряжения, прикладываемого к обмотке при гашении ее поля. Электромагнитный момент фазы экспериментально замерить нереально, но имеется возможность с определенной погрешностью оценить его при моделировании ВИД.
Если получить угол ν0, на который зубец ротора не «дошел» до зубца статора в момент оптимального отключения νoff, то можно рассчитать базовое угловое значение включения νon.б фазы по уравнениям

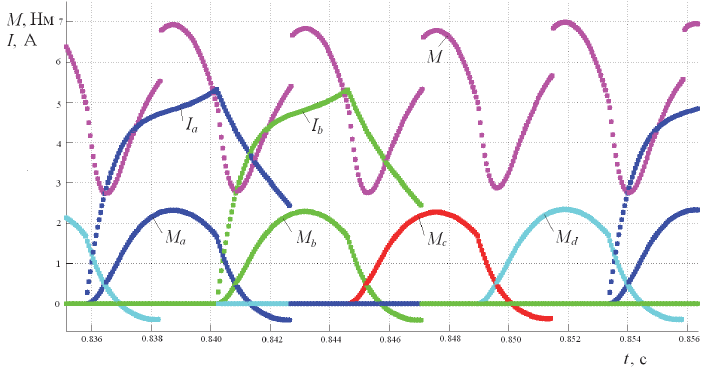
Рисунок 1 – Установившийся режим работы ВИД при одиночном симметричном алгоритме и нейтральной коммутации
Угол отключения νoff для одиночного симметричного алгоритма является углом включения νon для следующей фазы.
На рис. 2. показаны графики сравниваемых переменных ВИД при Kc и угле включения νon.б = 0,4 рад, который можно назвать базовым. Характер изменения момента и наименьший коэффициент пульсаций удовлетворяют условию оптимальности.
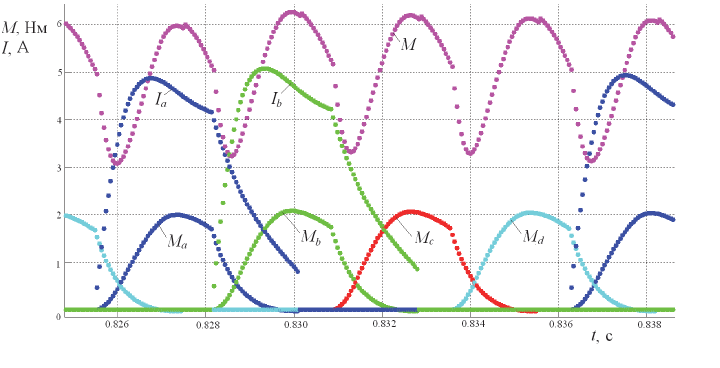
Рисунок 2 – Установившийся режим работы ВИД при одиночном симметричном алгоритме и базовом угле коммутации
Для некоторых коэффициентов несимметрии Kc и различных углов управления νon, полученные результаты сведены в табл. 2. Отрицательные значения – νon говорят о том, что угол управления νon меньше рассогласованного положения, принятого за начало отсчета.
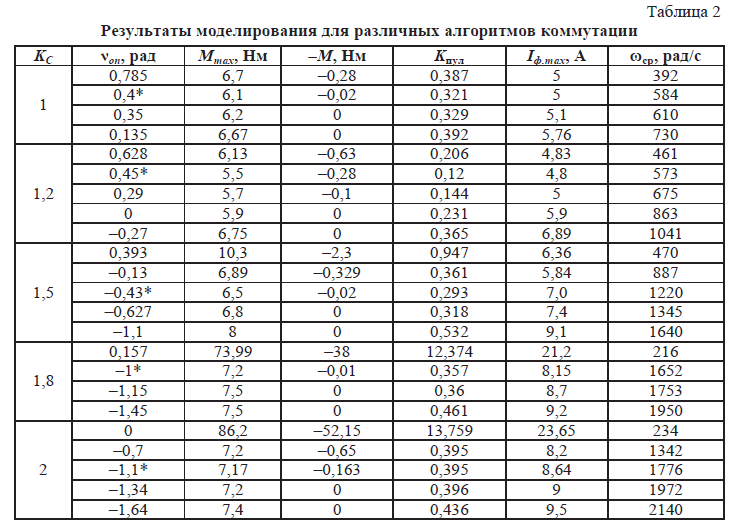
Примечание. * – угловые значения, которые можно считать базовыми для соответствующего коэффициента несимметрии.
При несимметричном алгоритме управления углы отключения фаз νoff могут меняться в следующих пределах:

где νoff.од – угол отключения при одиночном симметричном алгоритме коммутации; νoff.пар – угол отключения при парном симметричном алгоритме коммутации.
Для достижения оптимального режима работы с увеличением Kc базовый угол включения νon.б необходимо изменять в сторону опережения даже за пределы рассогласованного положения. Однако это смещение не должно превышать предельного угла, различного для каждого Kc. При пуске двигателя вхолостую и с нагрузкой угол включения νon необходимо выставлять больше угла рассогласованного положения, а по мере увеличения скорости можно скачком или плавно уменьшить до базового значения и более. Особенно это важно для одиночного симметричного режима.
Анализ табл. 2 показывает, что наименьшие пульсации и отсутствие тормозных эффектов одновременно невозможны. Поэтому за базовый угол управления νon.б принимается угол при минимальном коэффициенте пульсаций Кпул. При этом отрицательное значение моментов торможения фаз будет минимальным. С уменьшением угла управления меньше базового коэффициенты пульсаций возрастают, тормозные эффекты отсутствуют полностью (–M = 0). Скорость вращения ωνcp увеличивается при изменении угла управления в сторону опережения.
Уменьшение коэффициента пульсаций почти в 3 раза с применением несимметричного алгоритма (Kc = 1,2) по сравнению с одиночным симметричным (Кс= 1) подтверждает известный тезис. Однако с увеличением Кс это достоинство теряется, а при парном симметричном алгоритме
(Кс = 2) становится примерно таким же, как и при одиночном симметричном алгоритме управления. При этом скорость вращения увеличивается примерно в три раза. Следует ожидать, что нагрузочная способность двигателя при Kc = 2 увеличится при одинаковых скоростях вращения.
Регулирование скорости вращения при любом алгоритме управления от νon.б в ту или иную сторону вызывает рост коэффициентов пульсаций Кпул, а тормозные эффекты возникают при увеличении νon и отсутствуют при уменьшении νon.
Список использованной литературы
1. Кузнецов В.А., Кузьмичёв В.А. Вентильно-индукторные двигатели. М.: Изд-во МЭИ, 2003. 70 с.
2. Каасик П.Ю. Овчинников И.Е. Вентильные электрические двигатели и привод на их основе (малая и средняя мощность): курс лекций. СПб.: КОРОНА-Век, 2006. 336 с.
3. Радимов И.Н., Рымша В.В., Процына З.П. Коэффициенты полюсного перекрытия трехфазного вентильно-реактивного двигателя // Электромашиностроение и электрооборудование, 2009. Вып. 73. С. 63 –67.
4. Чихняев В.А., Нестерин В.А., Ваткин В.А., Бабак А.Г. Математическое исследование вентильно-индукторного привода // Автоматизированный электропривод: сб. науч. тр., посвященный 40-летию кафедры систем автоматического управления электроприводами Чуваш. гос. ун-та им. И.Н. Ульянова. Чебоксары: Изд-во Чуваш. ун-та, 2003. С. 152-160.