Аннотация
Kirti R. C., Sachin R. G., Ajay Z. Моделирование и имитация вентильно-индукторного двигателя при управлении скоростью привода В настоящее время во многих электрических приводах используются бесщеточные двигатели постоянного тока (BLDC) и двигатели постоянного тока. Однако в последнее время вентильно-индукторные электродвигатели (ВИД) стали лучшей заменой традиционным электродвигателям и электродвигателям BLDC благодаря высокой эффективности, отказоустойчивости, минимальной стоимости и переменной скорости. Двигатели с переключаемым сопротивлением (ВИД) используются во многих отраслях промышленности, таких как автоматизация и авиакосмическая промышленность, поскольку они обладают большим крутящим моментом. Обмотки со стороны ротора отсутствуют. Для приводов переменного или постоянного тока это первый выбор заказчика, так как он прост в обслуживании. Главное преимущество двигателей с переключаемым реактивным сопротивлением, простая конструкция. Вначале показаны характеристики и производительность ВИД. Затем в статье показано моделирование и метод моделирования.
Ключевые слова: реактивный двигатель, вентильно-индукторный привод, управление скоростью, MATLAB Simulation.
Введение
Электродвигатели с регулируемым сопротивлением (ВИД) имеют большие преимущества, поскольку они просты и удобны в обслуживании, а также доступны по низкой цене с повышенной отказоустойчивостью и возможностью отработки различных нагрузок [4].
Эквивалентная схема реактивного двигателя показана на рис. 2. В этой статье мы использовали 8/6 вентильный двигатель для анализа работы привода ВИД. В этой статье обсуждаются характеристики и параметры вентильно-индукторного двигателя. Результатом работы этого двигателя является периодичность электромагнитного момента. Из-зи своих конструктивных особенностей, показанных в данной работе, моделирование ВИД отличается от других электрических двигателей.
2. Моделирование двигателя
Эквивалентная схема привода вентильного двигателя (ВИД) для фазы A показана на рис. 1.
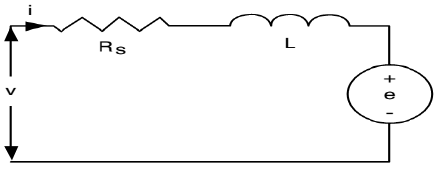
Рисунок 1 – Эквивалентная схема одной фазы ВИД
Уравнение фазного напряжения:

Где
Rs – сопротивление фазы;
L – индуктивность;
λ – потокосцепление.
λ – L(θ,i)i
В приведенном выше уравнении член справа показывает наведенную ЭДС и резистивное, индуктивное падение напряжения.
E - индуцируемая ЭДС

где,
мощность на выходе

Здесь для понимаемого взаимодействия используются следующие привычные переменные:

Из уравнения (3) и (4) получаем

Где, P sub>i

«Мощность воздушного зазора (P) есть не что иное, как произведение крутящего момента (г) и скорости ротора».
Уравнение крутящего момента
3. Разработка проекта
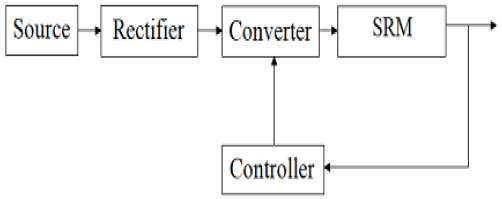
Рисунок 2 – Блок-схема привода вентильно-индукторного двигателя.
Двигатель состоит из выпрямителя, контроллера, вентильно-индукторного двигателя и преобразователя. В преобразователе использовался асимметричный мостовой преобразователь для передачи энергии, генерируемой путем управления переключателем тока обмотки двигателя. На рис. 3 показан однофазный асимметричный мостовой преобразователь. Аналогичным образом был использован тот же преобразователь для остальных фаз. Когда транзисторы (T1) и (T2) включены, ток циркулирует в фазе A ВИД. Когда ток превышает командное значение, транзисторы T1 и T2 выключаются. Энергия, накопленная в фазе А ВИД, поддерживает ток в одном и том же направлении до тех пор, пока ток не уменьшится, потому что D1 и D2 становятся смещенными в прямом направлении. В результате ток уменьшается и станет ниже заданного значения [1].
Конфигурация ВИД для 8/6 полюсов показана на рис. 4. Здесь мы использовали ПИ-регулятор, пропорционально интегральный. ПИ-регуляторы используются для минимизации установившихся ошибок, не влияя на стабильность системы. ПИ-регуляторы также используются для улучшения затухания, в то время как ПИ-регуляторы уменьшают полосу пропускания и увеличивают время нарастания.
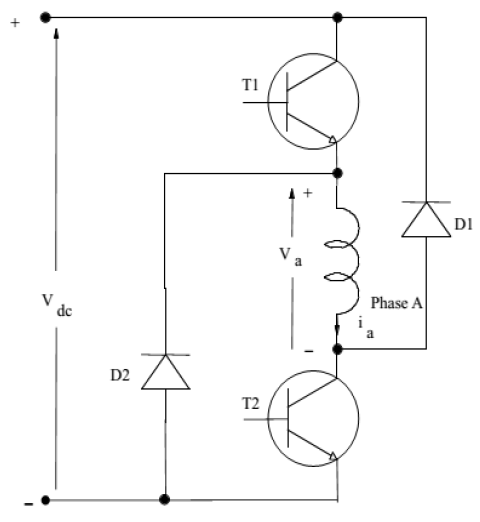
Рисунок 3 – Однофазный асимметричный преобразователь.
Существуют различные способы анализа характеристик ВИД
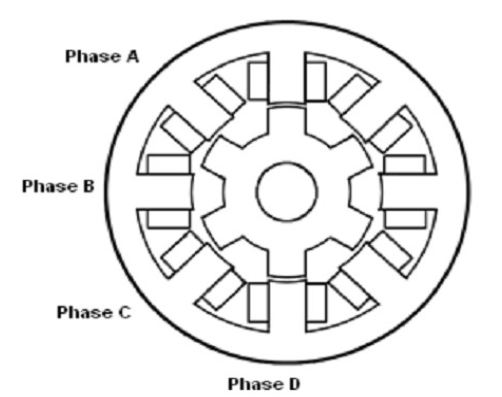
Рисунок 4 – 8/6 полюсный вентильно-индукторного электродвигателя.
Другими словами, метод управления основан на крутящем моменте, скорости и токе . Далее следует управление, основанное на скорости с использованием асимметричной топологии мостового преобразователя.
3. Контроль скорости привода ВИД
Устанавившиеся ошибки устраняются с помощью П и И части, комбинации пропорционального и интегрального, что также улучшает скорость отклика. Производительность ПИ-регулятора можно улучшить, предоставив преобразователю обратную связь, которой также можно управлять, преодолевая помехи. Устойчивое состояние ошибки могут быть устанены ПИ-регулятором во время работы каждого из П-регуляторов и двухпозиционных регуляторов. Режим интеграции отрицательно сказывается на быстродействии и стабильности системы. Вы можете обнаружить эту проблему, используя режим производных. Дифференциальный режим позволяет прогнозировать ошибки и сокращать время отклика контроллера. ПИ-регуляторы обычно используются, когда регулирование скорости не является нормой. В приводе ВИД, когда возникает внезапное ненормальное состояние и электродвигатель работает с номинальной скоростью, электродвигатель замедляется и перестает работать на номинальной скорости, после того как ошибка минимизируется и обратная связь через контроллер снова начинает работать с нормальной скоростью. Таким образом, можно анализировать управление скоростью привода реактивного электродвигателя с помощью ПИ-регулятора.
4. Результат моделирования
Разработанный модель проверяется с помощью MATLAB.
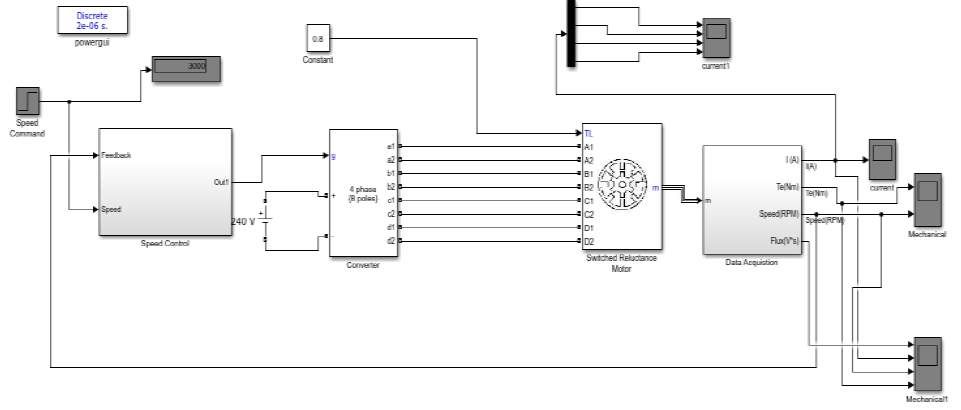
Рисунок 5 – Имитационная модель привода ВИД.
Результаты моделирования структуры для управления скоростью привода ВИД с использованием ПИ-регулятора следующие: Фаза (φ) также отключается и продолжается для оставшейся фазы (φ) ВИД. На рис. 7 показывает выходной магнитный поток привода ГРМ, рис. 8 показывает выходной ток ВИД привода, а на рис. 9 показывает переключатель реактивный двигатель с использованием ПИ-регулятора с эталонной скоростью N набор на 3000 об / мин. Указывает, что скорость может достигать почти 2970-2980. На рис. 10 показан выходной крутящий момент приводов ВИД.
При использовании ВИД он имеет некоторые преимущества, такие как снижение стоимости, повышение эффективности, консолидация цепочки поставок и т. д.
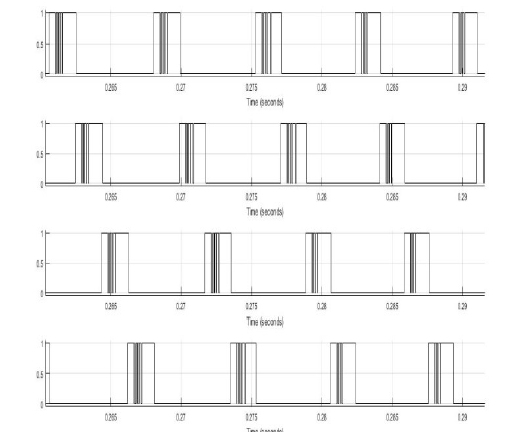
Рисунок 6 – Импульсы преобразователя, наблюдаемый на выходном затворе.
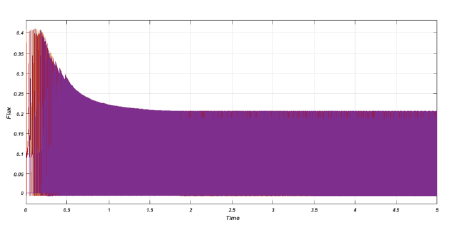
Рисунок 7 – Потокосцепление привода вентильно-индукторного электродвигателя.
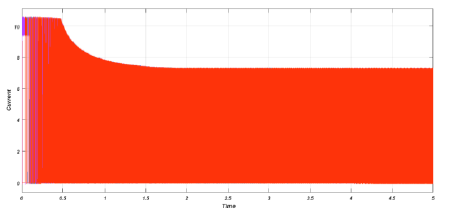
Рисунок 8 – Ток вентильно-индукторного электродвигателя на выходе.
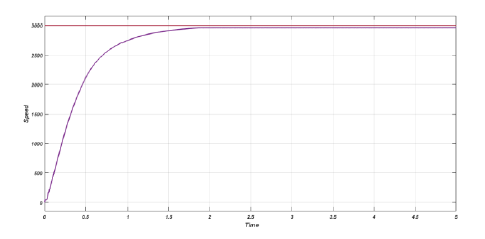
Рисунок 9 – рафик скорости вентильно-индукторного электродвигателя.
Вентильно-индукторный двигатель имеет больше возможностей в промышленном применении, например, в ветроэнергетике и электромобилях, из-за его конструкции, повышенной температуры эксплуатации.
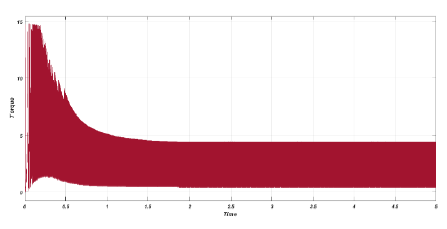
Рисунок 10 – Выходной крутящий момент привода вентильно-индукторного электродвигателя.
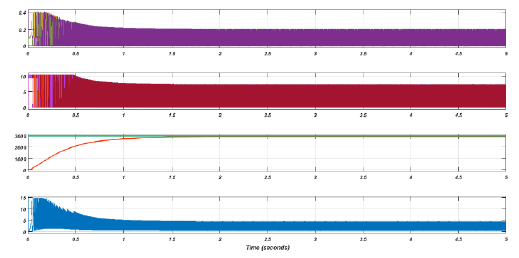
Рисунок 11 – Изменение электрических параметров вентильно-индукторного электродвигателя.
Заключение
Таким образом, двигатели ВИД являются наиболее надежными двигателями в промышленной и бытовой электронике из-за их различных преимуществ перед традиционными двигателями. В этом техническом документе мы использовали MATLAB / Simulink для разработки имитационной модели для управления скоростью двигателя с реактивным сопротивлением ВИД, работающим в нормальных и тяжелых условиях. В этом документе показаны преимущества инструментов моделирования. Как только вы будете удовлетворены результатами модели Simulink, вы можете начать разработку своего аппаратного прототипа.
Список использованной литературы
1. El-Shahat, Adel, Austin Hunter, Mosfequr Rahman, and Yan Wu. "Ultra-High Speed Switched Reluctance Motor-Generator for Turbocharger Applications." Energy Procedia 162 (2019): 359-368.
2. Azadru, Allahverdi, Siamak Masoudi, Reza Ghanizadeh, and Payam Alemi. "New adaptive fuzzy sliding mode scheme for speed control of linear switched reluctance motor." IET Electric Power Applications 13, no. 8 (2019): 1141-1149.
3. Thakare, Shubham Rajendra, and S. V. Patil. "Speed Control Strategy of Switched Reluctance Motor Drive Using Asymmetric Bridge Converter Topology." In 2019 4th International Conference on Recent Trends on Electronics, Information, Communication & Technology (RTEICT), pp. 313-317. IEEE, 2019.
4. Qiao, Dong-kai, and Mei-qing Cai. "The Design of BP Neural Network Modeling for Switched Reluctance Motor." In 2nd International Conference on Electrical and Electronic Engineering (EEE 2019). Atlantis Press, 2019.
5. Valencia, Diego F., Silvio Rotilli Filho, Alan Dorneles Callegaro, Matthias Preindl, and Ali Emadi. "Virtual-Flux Finite Control Set Model Predictive Control of Switched Reluctance Motor Drives." In IECON 2019-45th Annual Conference of the IEEE Industrial Electronics Society, vol. 1, pp. 1465-1470. IEEE, 2019.
6. Manikandan, R., and S. Smys. "Controller based performance measures of speed control of electrical motor for industrial applications." In 2017 International Conference on Inventive Systems and Control (ICISC), pp. 1-5. IEEE, 2017.
7. Pierre, Aguemon Dourodjaye, Agbokpanzo Richard Gilles, Houngan Kokou Theophile, and Vianou Antoine. "Torque ripple minimization in Switch Reluctance Motor using Model Predictive Control for water pumping application." Current Journal of Applied Science and Technology (2019): 1-9.
8. Torkaman, H., H. Khanbabaei, M. S. Toulabi, and A. Keyhani. "Two-level current reference method for speed control of switched reluctance motors." EPE Journal 30, no. 1 (2020): 13-23.
9. Omac, Zeki. "Fuzzy-logic-based robust speed control of switched reluctance motor for low and high speeds." Turkish Journal of Electrical Engineering & Computer Sciences 27, no. 1 (2019): 316-329.
10. Divandari, Mohammad, Behrooz Rezaie, and Abolfazl Ranjbar Noei. "Speed control of switched reluctance motor via fuzzy fast terminal sliding-mode control." Computers & Electrical Engineering 80 (2019): 106472.
11. Ferkova, Zelmira, Lubos Suchy, and Peter Bober. "Comparison of 6/4 and 12/8 switched reluctance motor models using direct torque control with torque lookup table." Electrical Engineering (2019): 1- 9.
12. Makwana, Jignesh A., Pramod Agarwal, and Satya P. Srivastava. "Novel Physical Modeling Technique for Switched Reluctance Motor." In 2019 Innovations in Power and Advanced Computing Technologies (i-PACT), vol. 1, pp. 1-7. IEEE, 2019.