
Реферат за темою випускної роботи
- Вступ
- 1 Оптимальне управління потоками потужності в неоднорідних електричних мережах з дальніми електропередачами
- 1.1 Метод формування законів оптимального управління потоками потужності в електричних системах на підставі аналізу їх неоднорідності
- 1.2 Вдосконалення методу формування законів оптимального управління нормальними режимами електричних систем з дальніми електропередачами
- 1.3 Особливості реалізації системи автоматичного керування потоками потужності в ес з децентралізацією функції управління в реальному часі
- 2 Оптимізація потокорозподілу активних потужностей
- 3 Оптимальний розподіл потоків потужності в замкнутих мережах
- Висновки
- Перелік використаних джерел
Вступ
Одним з основних показників ефективності використання електроенергії є технологічні витрати, пов 'язані з її транспортуванням від джерел живлення до споживачів.
Головною причиною підвищеної витрати електроенергії, зокрема технічної складової втрат, є низька ефективність електрозаберігаючих заходів, що, в свою чергу, обумовлено недостатнім рівнем автоматизації контролю та управління режимами магістральних і розподільних електромереж. Враховуючи високий рівень розвитку сучасних мікропроцесорних систем і широкомасштабне впровадження автоматизованих систем моніторингу режимів, особливо магістральних електромереж, стає можливим використовувати інформацію з баз даних таких систем в завданнях оптимізації управління потоками потужності і взаємовпливу електричних мереж в електричній системі (ЕС).
Автоматизація оптимального управління потоками потужності в сучасних ЕС, розвиваючись на базі існуючих автоматизованих систем диспетчерського управління (АСДУ), передбачає розробку та удосконалення технічного, інформаційного та програмного забезпечення. На сьогоднішній день в практиці диспетчерського управління енергосистемами використовують програмно-технічні засоби оптимізації нормальних режимів ЕС, які мають ряд недоліків. Недосконалість математично–програмного забезпечення обумовлено, переважно, з використанням спрощених математичних моделей процесів транспортування електроенергії, які були актуальними 20 & ndash; 30 років тому і не відповідають сучасному рівню апаратного забезпечення. У складі апаратного забезпечення практично відсутні спеціалізовані інформаційні пристрої зв 'язку між регулюючими пристроями і керованими електронно & ndash; обчислювальними машинами (ЕВМ). А без таких пристроїв неможлива взаємодія програмних засобів оптимального управління режимами електричних мереж і регулюючих пристроїв (РУ). Крім того, автоматизовані системи, що забезпечують локалізацію окремих функцій централізованого управління, реалізуючи програмне управління з місцевими параметрами та оперативну корекцію налагоджувальних параметрів локальних систем автоматичного управління (САУ), здатні підвищити надійність функціонування системи в цілому і розширити її функціональність в особливих режимах роботи.
1 Оптимальне управління потоками потужності в неоднорідних електричних мережах з дальніми електропередачами
1.1 Метод формування законів оптимального управління потоками потужності в електричних системах на підставі аналізу їх неоднорідності
Компенсувати додаткові втрати потужності та електроенергії в ЕС, обумовлені її неоднорідністю, можна шляхом регулювання напруги у вузлах або введенням в контури зрівнювальних е. д. с.. При такій постановці завдання керованими змінними є е. д. с., які необхідно ввести в замкнуті контури для реалізації оптимального струморозподілу за рахунок зміни коефіцієнтів трансформації трансформаторів, що входять в ці контури. [1].
Оптимальне значення втрат в ЕС досягається при відносних значеннях е. д. с., які розраховують за формулами:
| Е*ур.а(t) = πEa × J*p(t); | (1.1) | |
| Е*ур.р(t) = πEр × J*а(t); |
де Е*ур.а(t), Е*ур.р (t) – вектори активних і реактивних складових відносних значень зрівняльних ЕДС; J*а(t), J*p(t) – вектори активних і реактивних складових відносних значень струмів у вузлах.
У (1.1) всі параметри подано у відносних одиницях. Як базисні приймаються параметри ідеального режиму, розрахованого за r–схемі заміщення ЕС.
Матриці критеріїв подоби визначають за формулами:
 |
(1.2) |
де xк, rк – активна і реактивна складові матриці контурних опорів для системи базисних контурів; Мa, Na – матриці сполук гілок дереві схеми заміщення ЕС, відповідно, у вузлах контурах [2].
Співвідношення (1.1) є законами оптимального управління, в яких коефіцієнти зворотного зв 'язку за фізичним змістом – критерії подоби. Для реалізації законів управління розроблена система автоматичного управління (САУ) нормальними режимами ЕС, основна функція якої полягає в тому, щоб підтримувати значення комплексного критерію оптимальності F*, в якому враховані фактори надійності та економічності транспортування електроенергії, а також її якості, в межах встановленої зони нечутливості δF* (керуючі впливи регулюючими пристроями здійснюються після виходу критерію за її межі). Результатом дії системи є наближення поточної траєкторії зміни втрат потужності в ЕС до оптимальної за заданими експлуатаційними умовами. Крім того, реалізація керуючих впливів, отриманих на підставі (1.1)[2], забезпечує оптимізацію взаємовпливу магістральних і розподільних електромереж за втратами і рівнями напружень.
1.2 Вдосконалення методу формування законів оптимального управління нормальними режимами електричних систем з далекими електропередачами
Для компенсації негативного впливу неоднорідності параметрів електромереж за рахунок управління РУ в контури необхідно ввести ЕДС небалансу, за рахунок чого струми небалансу Iнб частково або повністю компенсують фіктивні зрівняльні струми Iур. У загальному випадку для j–го контуру, належного таким чином системі базисних контурів, ЕДС небалансу визначають [3]:
 |
(1.3) |
де ki – коефіцієнт трансформації i–го трансформатора, що належить до багатьох трансформаторів j–го контуру ТРj; Uб – напруга базисного вузла ЕС.
Фіктивні рівнянні ЕДС в неоднорідних електромережах, що містять трансформаторні зв'язки і далекі електропередачі як функції природного та економічного струморозподілу, можна визначити за виразом (1.5). Вирази для визначення векторів при наявності декількох балансуючих вузлів в електромережах можуть бути представлені наступним чином [3]:
 |
(1.4) | |
 |
(1.5) |
де NAk – матриця зв'язків гілок ЕС в її контурах, побудована з урахуванням трансформаторних зв' язків і далеких електропередач; ZB – діагональна матриця опорів гілок схеми заміщення, в якій гілки дальніх передач представлені постійними чотириполюсника В; Iэк – вектор економічних струмів у гілках схеми заміщення електромереж, визначений на підставі розрахунку економічного режиму електромереж з дальніми ЛЕП; I – вектор струмів у гілках, що відповідає реальному струморозподілу з урахуванням взаємовпливу електромереж різних класів напруги, які працюють паралельно.
Після перетворення та спрощень, підставивши у (1.5) вирази (1.4) [4]:
| Eзр = E*нбк × Ub − j × (E*нбγUb + Zф.урJ); | (1.6) |
де E*нбк – матриця відносних контурних ЕДС.
З (1.6) видно, що складові E*нбγ та Zф.ур визначаються співвідношенням реактивних і активних опорів гілок схеми заміщення ЕС [5], коефіцієнтами трансформації та коефіцієнтами поширення хвилі дальніх передач (у вигляді постійних чотириполюсника А). Отже, відсутність рівнянних ЕДС в замкнутих контурах характерна тільки для електромереж, в яких коефіцієнти трансформації в контурах збалансовані, всі гілки відповідають класичній умові однорідності, а для далеких ЛЕП забезпечується умова узгодженості коефіцієнтів поширення хвилі. Виходячи з останнього забезпечити однорідність електромереж з дальніми ДЕП практично неможливо, а для забезпечення режимів їх роботи, близьких до економічних, необхідно оптимальне управління трансформаторами зв 'язку з поздовжньо-поперечним регулюванням.
1.3 Особливості реалізації системи автоматичного керування потоками потужності в ЕС з децентралізацією функції управління в реальному часі
Для реалізації системи автоматизованого управління потоками потужності та напругою в електричних системах, яка забезпечувала б можливості оперативного управління, доцільно використовувати класичну двоконтурну схему з децентралізацією функцій управління в реальному часі [5]. На першому етапі (в контурі централізованого управління) визначають причини неоптимального функціонування ЕС і перелік доступних регулюючих пристроїв. Для цього виконують ретроспективний аналіз результатів управління режимами на підставі короткострокового планування, а також оцінюють показники неоднорідності ЕС. Далі, використовуючи повну інформацію про параметри ЕС, визначають та коригують матриці умовно постійних параметрів. З використанням розроблених математичних моделей здійснюють адаптацію законів управління в реальних умовах функціонування регулюючих пристроїв, виконують ранжування регулюючих пристроїв за пріоритетом управління з урахуванням надійності та ресурсу пристроїв РПН. Визначають зони нечутливості локальних систем управління регулюючими пристроями, що дозволяє встановити раціональну інтенсивність перемикань для кожного трансформатора і скоординувати їх роботу під час оперативного управління таким чином, щоб зниження втрат потужності досягалося при мінімальній кількості перемикань.
На другому етапі (в контурі локального управління) отримані математичні моделі використовують для визначення розрахункового значення керуючих впливів та прийняття рішення про доцільність їх реалізації. Управління в темпі процесу здійснюють тільки в контурі оперативного управління. У зовнішньому контурі, при необхідності, може здійснюватися коригування пасивних параметрів ЕС. Однак така зміна частіше здійснюється на стадії короткострокового планування режимів після значних змін навантажень або істотних відхилень параметрів регулюючих пристроїв від планових [6, 7].
Подібна схема реалізації системи управління дозволяє забезпечити децентралізацію частини інформаційних функцій без втрати принципів централізованого управління, оскільки протягом основного часу (режими нормальної експлуатації ЕС) регулювання параметрів трансформаторів здійснюється на підставі локальних параметрів, забезпечуючи умовний оптимум загальносистемного критерію оптимальності. Відхилення пасивних параметрів ЕС або параметрів режиму централізовано контролюють і за потреби коригують окремі параметри моделей. Отже, по суті реалізується централізоване оперативне управління режимами ЕС за допомогою децентралізованих
підсистем – локальних регулюючих пристроїв на окремих трансформаторних підстанціях (електростанціях) [7].
Автоматичне керування РУ ЕС та погодження керуючих впливів з оперативним управлінням виконують з використанням мікропроцесорного пристрою автоматичного контролю та управління функціонуванням (АКУФ) РУ (мал. 1.1). Пристрій може працювати в трьох основних режимах:
- отримання закону з керуючою ЕВМ та управління згідно з ним (за наявності в достатній кількості достовірної інформації про стан електричної мережі);
- введення з центральної системи керування номера відпайки та встановлення її на регуляторі РПН трансформатора (за відсутності належного інформаційного забезпечення або дистанційного керування диспетчером енергосистеми);
- автономна робота пристрою в режимі стабілізації вторинної напруги трансформатора або автотрансформатора на заданому рівні з урахуванням введеної зони нечутливості, або автономна реалізація зустрічного регулювання напруги.

Малюнок 1.1 – Зовнішній вигляд пристрою АКУФ РУ (вигляд спереду)
Для переведення АКУФ РУ зі стану очікування в активний стан засобами АСУ підстанції через блок зв 'язку передають код операції. Після цього пристрій перевіряє параметри РПН для ідентифікації крайніх положень: отриману інформацію записують в оперативний пристрій, що запам 'ятовує (ОЗУ). Залежно від коду операції пристрій переводять у відповідний режим роботи.
При необхідності встановити певну відпайку регулятора РПН спочатку через блок зв 'язку здійснюють введення її номера від керуючої ЕВМ. У разі неспівпадіння номера нової відпайки з номером встановленої, визначають знак керуючого сигналу (напрямок перемикання РПН). Далі керуючі імпульси надходять до регістрів блоку контролю та управління РПН; відповідні реле замикаються - і починається перемикання. Пристрій переходить у режим очікування закінчення перемикання, контролюючи відповідні канали блоку контролю і управління РПН. Після закінчення перемикання керуючі імпульси знімають, вимірюють параметри об 'єкта керування, перевіряють відповідність їх заданим обмеженням і знову порівнюють номери відпусток. Процес повторюється, поки на регуляторі РПН не встановиться необхідна відпайка. Будь-які порушення обмежень за параметрами (струми, напруги), порушення в роботі пристрою або регулюючого пристрою у вигляді повідомлень направляються в керуючу ЕВМ [8].
Застосування АКУФ РУ дозволяє ввести в систему управління нормальними режимами ЕС зворотний зв 'язок, контролювати виконання керуючих впливів і оцінювати ефективність управління як окремими трансформаторами, так і енергосистемою в цілому. Останнє дає можливість автоматизувати низку функцій оперативного управління та підвищити ефективність використання РУ трансформаторів у завданнях зменшення втрат активної потужності в електричній системі.
2 Оптимізація потокорозподілу активних потужностей
Сучасні електричні мережі мають природний потокорозподіл: потоки потужності розподіляються по паралельних гілках відповідно комплексним величинам опорів ліній, що утворюють ці шляхи.
Економічним називається потокорозподіл, що відповідає мінімуму втрат активної потужності в мережі. Економічний потокорозподіл збігається з природним, що виникає в розрахунковій схемі після виключення з неї реактивних опорів. При економічному потокорозподілі потужності по гілках розподіляються тільки у відповідності з активними опорами.
При природному потокорозподілі оптимізація режиму енергосистеми проводиться в двох напрямках. Оптимізується розподіл активних потужностей між станціями за умовою мінімуму сумарної витрати палива в енергосистемі. Коригується реактивна потужність ліній за умовою мінімуму втрат у мережі з урахуванням обмежень обладнання, встановленого диспетчером профілю напруги та умов стійкості. При цьому потоки активної потужності не змінюються або змінюються незначно [8].
Несприятливий потокорозподіл у розвинених високовольтних мережах пов 'язаний з неоднорідністю мереж – відмінністю індуктивної добротності. Для ліній 110 кВ діапазон ID = 1,37–3,34.
Мінімальні втрати в мережі і відповідний оптимальний розподіл потоків активної потужності були б за умови рівності індуктивних добротностей всіх ліній, що утворюють замкнуті контури. Отже, для оптимізації потокорозподілу в розвинених мережах транзитні потоки в лініях нижніх шарів необхідно знизити в кілька разів.
Оптимізація природного розподілу потоків потужності в замкнутих мережах може бути досягнута наступними шляхами:
- поздовжнім і поздовжньо-поперечним регулюванням; включенням в контури установок поздовжньої компенсації; розмикання частини контурів замкнутої мережі;
- застосуванням вставок постійного струму (ТВП); використанням керованих ліній електропередачі; використання гнучких електропередач.
На малюнку 2.1 синусоїдальна напруга (червона лінія) і струм (зелена лінія) синфазни – між ними немає фазового зрушення (φ = 0°, cosφ = 1) – навантаження повністю активне, немає реактивної складової. Миттєва потужність (синя лінія) і активна потужність (блакитна лінія).
Синусоїдальна напруга (червона лінія) і струм (зелена лінія) мають фазове зрушення φ = 90° (cosφ = 0) – навантаження повністю реактивне, немає активної складової. Миттєва потужність (синя лінія) і активна потужність (блакитна лінія) розраховані з коефіцієнтом потужності, рівним 0.
Синусоїдальна напруга (червона лінія) і струм (зелена лінія) мають фазове зрушення φ = 45° (cosφ = 0,71) – навантаження має і активну, і реактивну складові. Миттєва потужність (синя лінія) і активна потужність (блакитна лінія) розраховані зі змінної напруги і струму з коефіцієнтом потужності, рівним 0,71.
Малюнок 2.1 - Фазове зрушення між синусоїдальною напругою і струмом
(анімація: 3 кадри, 7 циклів повторення, 56 кілобайт)
(Червона крива – напруга; зелена крива – струм; синя крива – потужність; блакитна крива – середня потужність; φ – кут зсуву між фазами)
3 Оптимальний розподіл потоків потужності в замкнутих мережах
Оптимізація розподілу потужностей у замкнутому контурі – це приватне завдання оптимізації режиму електричної мережі. Будемо вважати, що у вузлах мережі задані незмінні струми, тобто рівняння режиму лінійні. Якщо у вузлах задані незмінні потужності, то вони визначаються за номінальною напругою [9]:
 |
(3.1) |
де Sk и Ik – задані комплексні потужність і струм у кожному вузлі; Un – номінальна напруга мережі.
При цьому струм у гілці kj визначається таким чином:
 |
(3.2) |
При виконанні умов (3.1) або (3.2) рівняння режиму, що встановився, залишаються лінійними, тобто замість заданих комплексних струмів у вузлах можна використовувати комплексні потужності у вузлах, а замість струмів у гілках – потужності в гілках.
Знайдемо розподіл потужностей у мережі на малюнку 3.1, що відповідає найменшим втратам активної потужності, при виконанні першого закону Кірхгофа для потужностей за умови (3.1). Іншими словами, визначимо такі значення потужностей S12, S13, S23, які відповідають мінімуму втрат активної потужності в мережі.
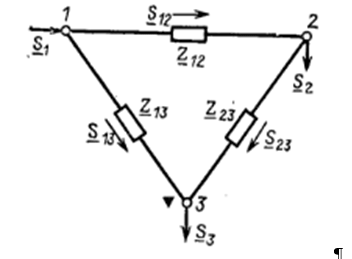
Малюнок 3.1 - Схема замкнутої мережі
При виконанні наступних обмежень-рівностей першого закону Кірхгофа для активних і реактивних потужностей:
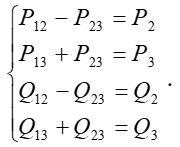 |
(3.3) |
Втрати активної потужності в мережі (рис. 3.1) з урахуванням умови (3.2) рівні:
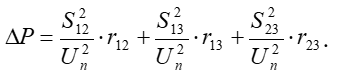 |
Умова мінімуму втрат:
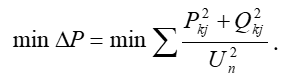 |
(3.4) |
Втрати потужності, записані у вигляді (3.4), це цільова функція завдання оптимізації режиму мережі, умови (3.3).
Система обмежень (3.3) містить чотири рівняння і шість невідомих активних і реактивних потоків потужності в гілках Р12, Р13, Р23, Q12, Q13, Q23.. Вона має нескінченну безліч рішень. Ви можете встановити будь-які значення, наприклад, чотирьох потоків Р13, Р23, Q13, Q23 і з (3.3) знайти значення потоків Р12, Q12, які задовольняють перший закон Кірхгофа. Параметри режиму мають два ступені свободи. Змінюючи параметри режиму, можна знайти такі значення, при яких втрати потужності ΔР у мережі мінімальні [8].
Режим простої замкнутої мережі описується не тільки двома комплексними рівняннями першого закону Кірхгофа, а й одним комплексним рівнянням другого закону Кірхгофа. Здійснювати регулювання і зменшувати ΔР неможливо.
Визначимо потоки потужності, що відповідають мінімуму втрат. Для цього висловимо Р12, Р23, Q12, Q23 з (3.3) через невідомі потоки Р13, Q13 та задані навантаження у вузлах:
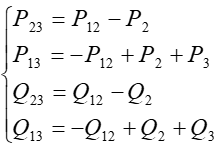 |
(3.5) |
Підставимо (3.5) до цільової функції (3.4) і висловимо втрати через два невідомих потоки Р12 и Q12..
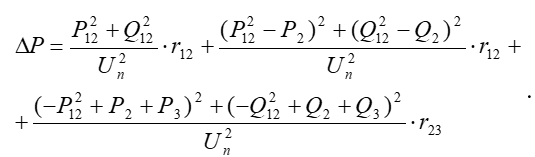 |
(3.6) |
Отримали цільову функцію, яка залежить тільки від двох невідомих Р12 и Q12. При цьому завдання визначення умовного екстремуму функції шести невідомих зведене до відшукання безумовного екстремуму функції двох змінних. Як відомо, останній визначається з умови рівності нулю приватних похідних від ΔР до Р12 та Q12. Вирішивши рівняння, в результаті отримаємо наступні аналітичні вирази для оптимальних (економічних) потоків потужності Р12 и Q12 [9]:
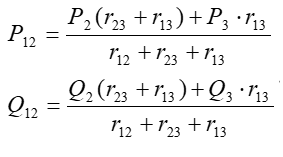 |
(3.7) |
Мінімум втрат потужності при виконанні першого закону Кірхгофа відповідає розподілу потужностей в простій замкненій мережі тільки з активними опорами. Цей розподіл потужностей називається економічним [10].
Висновки
Генерація реактивної потужності впливає на режим напружень і потокорозподіл потужностей системи. Отже, розподіл реактивних потужностей також може бути завданням оптимізації.
При комплексній оптимізації будь-які зміни потоків потужності впливають на вузлові напруги, а значить, зміна потоків активних потужностей впливає на потоки реактивних і навпаки.
При комплексній оптимізації розглядається повне завдання визначення режиму активних і реактивних потужностей системи. Електрична мережа представляється таким чином, щоб отримати активні і реактивні потужності по всіх необхідних гілках і вузлах. Оскільки зміни потоків потужності в мережі впливають на вузлові напруги, то, значить, зміна потоків активних потужностей вплине на потоки реактивних і навпаки. Головні труднощі комплексної оптимізації полягають у тому, що поєднуються два завдання: оптимального розподілу навантаження між станціями і оптимального режиму мереж.
Електричні системи не є оптимальними з урахуванням витрати електроенергії при її виробництві, транспортуванні та розподілі. Однією з основних причин неоптимальності станів ЕС є їх неоднорідність. Забезпечення оптимальності режимів роботи ЕС вимагає застосування відповідних систем автоматичного управління.
Застосування пристрою АКУФ РУ дозволяє реалізувати в автоматизованій системі оптимального управління нормальними режимами ЕС зворотний зв 'язок за параметрами управління та забезпечує можливість децентралізації окремих завдань оперативного управління таких, як адаптація параметрів спостереження, контроль за виконанням керуючих впливів, оцінки доцільності управління окремими трансформаторами тощо.
Перелік використаних джерел
- Холмский В. Г. Оптимизация потокораспределения в замкнутых электрических сетях с высокой степенью неоднородности / В. Г. Холмский // Электричество. – 1965. – № 9. – С. 16 – 21.
- Веников В. А. Дальние электропередачи переменного и постоянного тока / В. А. Веников, Ю. П. Рыжов. – М.: Энергоатомиздат, 1985. – 272 с.
- Электрические системы и сети / Н.В. Буслова, В.Н. Винославский, Г.И. Денисенко, В.С. Перхач. – К.: Вища шк. Головное издательство, 1986. – 584 с.
- Справочник по проектированию электроэнергетических систем / Под ред. С.С. Рокотяна, И.М. Шапиро. – М.: Энергоатомиздат, 1985. – 352 с.
- Лежнюк. П. Д. Моделирование компенсации влияния неоднородности электрических сетей на экономичность их режимов / П. Д. Лежнюк, В. В. Кулик, Д. І. Оболонський // Электричество. – 2007. – № 11. – С. 2 – 8.
- Рожкова Л. Д., Козулин В. С. Электрооборудование станций и подстанций. – М.: Энергоатомиздат, 1987. – 648 с.
- Справочник по электроустановкам высокого напряжения / Под ред. И.А. Баумштейна и В.М. Хомякова. – М.: Энергоатомиздат, 1981. – 656 с.
- Электрические системы и сети / Н.В. Буслова, В.Н. Винославский, Г.И. Денисенко, В.С. Перхач. – К.: Вища шк. Головное издательство, 1986. – 584 с.
- Справочник по проектированию электроэнергетических систем / Под ред. С.С. Рокотяна, И.М. Шапиро. – М.: Энергоатомиздат, 1985. – 352 с.
- Идельчик В.И. Электрические системы и сети. – М.: Энергоатомиздат, 1989. – 592 с.