
Реферат за темою випускної роботи
Зміст
- Вступ
- 1. Актуальність теми
- 2. Мета і задачі дослідження та заплановані результати
- 3. Визначення положення
- 4. Вибір апаратної частини
- 4.1 L298 Dual H–Bridge драйвер
- 4.2 Понижуючий модуль на мікросхемі MP1584EN
- 4.3 Радіомодуль NRF24L01+
- 4.4 Датчик струму на 5A ACS712
- Висновки
- Список джерел
Введення
Людство завжди було стурбоване питанням, як же спростити керування автомобілем, зробити машину більш маневреної, стійкої на дорозі? Одним із способів вирішення є установка електронних систем: курсової стійкості, система гальмування і т. д. Але це не справляло такого значного ефекту. Тому інженери пішли по іншому шляху – модернізації рульового управління. Підрулюючим задні колеса і теорія проходження повороту. Навіть при наявності самої прогресивної конструкції підвіски, приміром, багатоважеля, при русі на високій швидкості серйозним фактором, що впливає на керованість, стає інерція прямолінійного руху задніх коліс, що чинять опір повороту. При повороті рульового колеса, коли передні колеса починають рухатися вліво або вправо в напрямку повороту, задні некеровані колеса намагаються залишатися на колишньої траєкторії. Типи підрулювальною задньої підвіски і схеми роботи У ранніх системах, наприклад, на тракторах двадцятих років минулого століття, кут підрулення був великим, до 15 градусів. З підвищенням максимальної швидкості від таких великих кутів довелося відмовитися. У сучасних автомобілях системи подруливающих коліс забезпечують поворот максимум на 5-8 градусів.
Задня підрулювальна підвіска ділиться на два види — активну і пасивну.
Активна підрулювальна підвіска.
Якщо автомобіль оснащений активною підрулювальною задньою підвіскою, всі чотири колеса повертають відразу, реагуючи на рух керма. В сучасних системах зусилля від рульового колеса на задні колеса передається не механічно за допомогою системи важелів, а через команду електронного блоку управління і втягуюче реле, інакше званих актуаторами. Вони пересувають задні кермові тяги, схожі з тими, що застосовуються в основній системі рульового управління. Активна підрулювальна підвіска працює в двох режимах. При русі на низькій швидкості, наприклад, на автостоянці або при заїзді в гараж, в момент, коли передні колеса повернені вправо, задні повертають ліворуч, і навпаки. Це дає можливість зменшити радіус повороту на двадцять — двадцять п'ять відсотків. На високій швидкості схема роботи змінюється. При повороті передніх коліс вліво, задні колеса подруливают в ту ж сторону, але на менший кут. За визначенням точного кута підрулення стежить електронний блок управління, беручи до уваги показання датчика кутового прискорення, датчика швидкості і інших, формуючи оптимальний алгоритм проходження віражу.
Пасивна підрулювальна підвіска. У багатьох сучасних автомобілях застосована спрощена система подруливающих задніх коліс, протидіюча інерції прямолінійного руху за рахунок використання в підвісці елементів, що володіють певними фізичними властивостями. Такий тип підрулювальною підвіски називається пасивним. В автомобілях з пасивним подруливанием задня підвіска будується за особливої геометрії, і, як правило із застосуванням рухомої тяги Уатта. Система розрахована так, що при проходженні віражу на високій швидкості задні колеса за рахунок перерозподілу сил у підвісці мають тенденцію підрулювати в ту ж сторону, що і передні. Крім геометрії ефект посилюється підбором сайлентблоків певної форми і пружності. Така конструкція істотно підвищує стабільність автомобіля при повороті. Пасивною системою подруливающих задніх коліс оснащувалися, приміром, автомобілі Ford Focus першого покоління.
1. Актуальність теми
Інерція прямолінійного руху задніх коліс, особливо на високих швидкостях, в значній мірі впливає на керованість автомобіля при входженні в повороти. Простіше кажучи, вони чинять опір повороту, прагнучи залишитися на своїй колишньої траєкторії. Справедливості заради варто сказати, що ідея сама по собі не нова, і підрулюючим задні колеса вже давно використовуються на навантажувачах, які змушені маневрувати в замкнутих просторах складів.
Сьогодні у багатьох іменитих автовиробників розроблена і впроваджена подібна система. Всі вони мають свою назву, відрізняються конструктивно, але суть залишається незмінною — задні колеса змінюють своє положення при поворотах, скорочуючи траєкторію і підвищуючи стійкість.
Актуальність полягає в розробці подруливающих коліс на базі електроприводу і сервоприводу.
Малюнок 1 – Демонстрація роботи рульового механізму
(анімація: 6 кадрів, нескінченний цикл повторення, 80 кілобайт)
2. Мета і завдання дослідження, плановані результати
Метою дослідження є розробка подруливающего електроприводу, спрямованого на зменшення кута повороту.
Основні завдання дослідження:
- Математичний опис об'єкта управління.
- Синтез системи управління об'єктом.
- Моделювання роботи системи управління та об'єкта в середовищі Simulink пакету Matlab.
- При досягненні необхідних результатів, виконати генерацію коду системи управління на мові C/C++.
3. Визначення положення
Первісною завданням, і однією з найважливіших для робототехнічної системи, є задача визначення поточного положення, у якій знаходиться робототехническая система.
Для цього, пристрій подруливающих коліс повинно включати програмну частину.
Ряд завдань, які повинна вирішувати система управління:
- Планування кута повороту.
- Виконання кута повороту за заданої швидкості, необхідно виробити задають впливу для виконавчих механізмів системи.
Блок первинної обробки даних отримує необроблену інформацію з датчиків про стан зовнішнього середовища. У цьому блоці дані збираються, сгруппировываются і піддаються обробці. На виході виходять відформатовані дані, що передаються по стандартних протоколах. Це необхідно для зручності підключення нових датчиків, і чіткої систематизації даних, що надалі полегшує роботу з даними. Інформаційно-вимірювальна система ідентифікації ситуації на основі оброблених даних вибудовує картину навколишнього світу. Дані з датчиків перетворюються в набір параметрів, на основі яких інші підсистеми приймають рішення. Параметри формуються з допомогою бази знань і алгоритмів. Тут же проводиться розпізнавання оточуючих об'єктів і побудова сенсорної карти середовища. В базі алгоритмів містяться математичні алгоритми для вибудовування на основі даних цільової сенсорної карти, розпізнавання навколишнього обстановки і предметів (розпізнавання звукових образів і зображень, цифрова обробка сигналів, обчислення необхідних параметрів і перевірка отриманих даних. База знань являє інформацію про зовнішньому середовищі, закладену на етапі навчання і придбану в процесі функціонування. Знання впорядковуються і оновлюються.
4. Вибір апаратної частини
Для тестування і налагодження програми в ході магістерської роботи буде використана радіокерована модель, в яку будуть входити наступні комплектуючі: L298 Dual H–Bridge драйвер, Понижуючий модуль на мікросхемі MP1584EN, Радіомодуль NRF24L01+, Датчик струму на 5A ACS712, Arduino Uno.
4.1 L298 Dual H–Bridge драйвер
L298n являє собою подвійний мостовий драйвер для управління двосторонніми навантаженнями з струмами до 2А напругою від 4.5 до 46 Ст. Мікросхема розроблена для управління реле, соленоїдами, двигунами постійного струму і кроковими двигунами. L298n має TTL сумісні входи. У L298n існує поділ електроживлення для логічної схеми та для навантаження, що дозволяє підключити навантаження з меншою або більшою напругою живлення, ніж у мікросхеми, а також зменшує перешкоди..
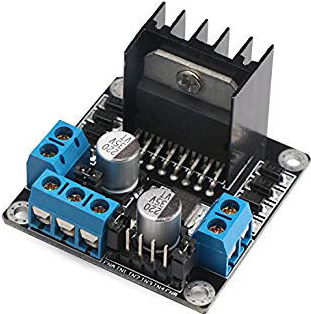
Малюнок 2 – Подвійний мостовий драйвер L298n
Мікросхеми L298n мають вбудований захист від перегріву. Виходи мікросхеми відключаються при нагріванні до температури близько +70°С
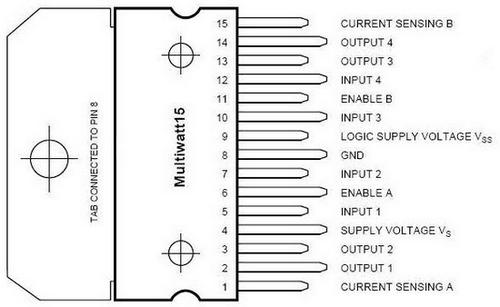
Малюнок 3 – Розташування виводів драйвера L298n
Даний драйвер вже дуже устрарел. Драйвер боботает на застарілих біполярних транзисторах, які у відкритому стані мають досить великий опір. Як наслідок драйвер не витримує навантаження понад 2А при значних розмірах, а також завжди необхідний радіатор для відводу тепла.
4.2 Понижуючий модуль на мікросхемі MP1584EN
Даний модуль являє собою простий імпульсний понижуючий перетворювач постійної напруги на мікросхемі MP1584EN[3]. Модуль має низький рівень шуму, а це дуже важливо, так як він видає харчування на мікроконтролер і радіомодуль, які дуже вимогливі до стабільного харчування.
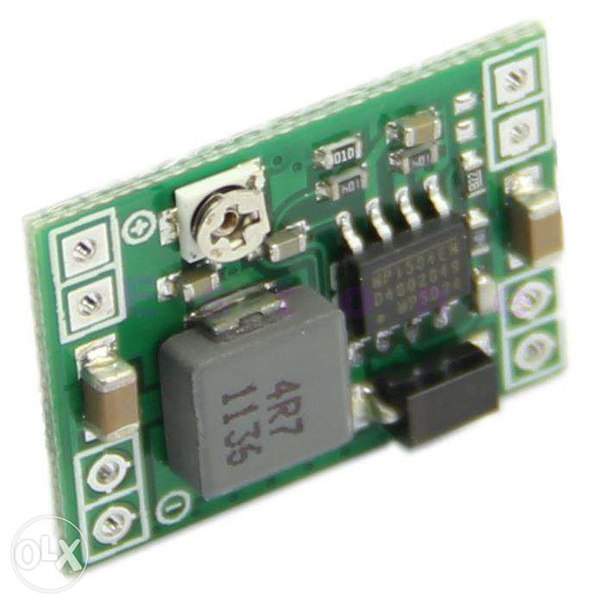
Малюнок 4 – Понижуючий модуль на мікросхемі MP1584EN
Для установки вихідної напруги модуль має вбудований потенцеометр.
Характеристики стабілізатора:
- Вхідна напруга: від 4.5 до 28В;
- Вихідна напруга:від 0.8 до 24В;
- Максимальний вихідний струм: 3А;
У нашому випадку вихідний струм модуля не превышеает 300мА, так що можна сміливо використовувати його без радіатора, перегріву точно не буде.
4.3 Радіомодуль NRF24L01+
РРадіомодуль для зв'язку мікроконтролерів між собою. Працює на частоті 2.4 ГГц[5] (не вимагає дозволів частота, яка так само використовується для WiFi), швидкість до 2мбіт, управляється по інтерфейсу SPI, живлення 3.3 В (можна використовувати висновок 3.3 плати Arduino). Істотно дешевше xbee модуля, добре підходить для промислових систем управління. Радіус дії – на открыйтой місцевості до 100м, в межах квартири, через дві стіни працює впевнено, через три - бувають втрати сигналу.
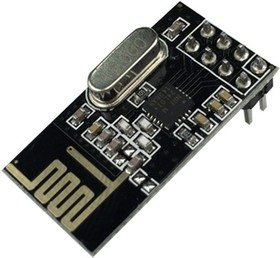
Малюнок 5 – Радіомодуль NRF24L01+
Характеристики:
- Швидкість до 2мбіт (настроюється 2, 1, 0,25 Мб/с;
- 126 каналів зв'язку, під'єднання один до багатьох, стрибкоподібна перебудова частоти;
- Апаратний контроль помилок, контроль адресації багатоточкової зв'язку;
- Низьке енергоспоживання: 1.9–3.6, 1мкА в режимі Power down;
- Модуляція GFSK;
- Вбудована 2.4 ГГц антена;
4.4 Датчик струму на 5A ACS712
Датчик постійного струму ACS712[6] на ефекті Холу дозволяє постаточно просто інтегрувати його в схему і почати вимірювання струму. Датчик повністю готовий до роботи в мікроконтролером і не вимагає додаткових компонентів. Все що потрібно - це наявність аналогового входу на мікроконтролері.
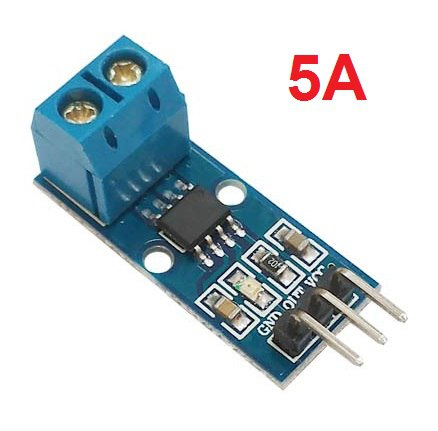
Малюнок 6 – Датчик струму на 5A ACS712
Характеристики:
- Діапазон вимірювання струму: до 5А;
- чутливість: 185 мВ/А;
- максимальна смуга пропускання становить: 80 кГц;
- напруга живлення датчика: 5В;
Висновки
В ході розробки пристрою подруливающих коліс, на підставі завдань, що плануються до виконання, був вибраний мікроконтролер, а також необхідні комплектуючі для реалізації проекту.
Надалі планується складання і доведення всіх алгоритмів повної працездатності.
На момент написання даного реферату магістерська робота ще не завершена. Орієнтовна дата завершення магістерської роботи: червень 2021 року. Повний текст роботи і матеріали по темі можуть бути отримані у автора або його керівника після зазначеної дати.
Список джерел
- Підрулюючим задні колеса [Електронний ресурс]. – Режим доступу: https://www.drive2.ru/b/451627975595524270/
- Simulink. [Електронний ресурс]. – Режим доступу: https://matlab.ru/products/Simulink
- WaijungBlockset. [Електронний ресурс]. – Режим доступу: http://waijung.aimagin.com/
- DUAL FULL-BRIDGE DRIVER, Electronics Description, DataSheet № L298N
- Драйвер L298N. [Електронний ресурс]/ Режим доступу: http://robotchip.ru/obzor-drayvera-motora-na-l298n/
- Arduino IDE програмне середовище для розробки під Ардуїнов [Електронний ресурс]/ Режим доступу: https://arduinoplus.ru/arduino-ide-opisanie-gde-skachat/
- Eclipse (середовище розробки). [Електронний ресурс]. – Режим доступу: https://www.eclipse.org/
- Коцегуб П. Х. Губар Ю. В., Синтез комбінованої системи позиційного електроприводу з цифровим ІП-регулятором – Донецьк, 1985.
- CMOS Rail-to-Rail General-Purpose Amplifiers, DataSheet № AD8541_8542_8544
- 1CxemCAR - Android-управління машинкою по Bluetooth. [Електронний ресурс]. – Режим доступу: https://cxem.net/...
- Simulink. [Електронний ресурс]. – Режим доступу: https://matlab.ru/products/Simulink