При написанні даного реферату магістерська робота ще не завершена. Остаточне завершення: червень 2021 року. Повний текст роботи
і матеріали по темі можуть бути отримані у автора або його керівника після зазначеної дати.
Реферат за темою випускної роботи
Вступ
Десять років тому концепція повністю безпілотного транспортного засобу залишалася в значній мірі прерогативою академічних дослідницьких інститутів. В даний час комерційна діяльність компаній (наприклад, Waymo) показала, що можливе створення транспортних засобів без водія, які повністю змінять наше соціально–економічне сприйняття особистого транспорту.
Однак, згідно з висновками звіту [1], випущеного корпорацією Ренд
, прототипи автомобілів без водіїв повинні проїхати сотні мільйонів миль, а в деяких випадках сотні мільярдів миль протягом декількох десятиліть, щоб продемонструвати їх надійність і безпеку. Такий результат автори звіту порахували несумісним з найближчої комерційної життєздатністю самохідних автомобілів. Для порівняння, це приблизно половина відстані, пройденого космічним зондом Voyager 2 за останні 40 років. Щоб вирішити цю проблему, дослідники вказали на інноваційні методи тестування, такі як передові технології моделювання.
1. Актуальність теми
При сучасному рівні розвитку техніки, коли навіть побутові прилади оснащуються мікропроцесорними пристроями, все більш актуальним стає розробка нових систем автоматичного управління.
Але в зв'язку зі зростаючою складністю об'єктів управління і зі збільшенням вимог до систем управління за останнє десятиліття різко підвищилася необхідність в створенні більш точних, більш надійних систем управлінні, що володіють великими функціональними можливостями.
Інтелектуальні системи на основі штучних нейронних мереж (ШНМ) дозволяють з успіхом вирішувати проблеми ідентифікації та управління, прогнозування, оптимізації. Відомі й інші, більш традиційні підходи до вирішення цих проблем, проте вони не володіють необхідною гнучкістю і мають істотні обмеження на середу функціонування.
Нейронні мережі дозволяють реалізувати будь–який необхідний для процесу нелінійний алгоритм управління при неповному, неточному описі об'єкта управління (або навіть при відсутності опису), створювати м'яку адаптацію, що забезпечує стійкість системі при нестабільності параметрів.
ШНМ можуть застосовуватися для різних завдань: апроксимація функцій, ідентифікація, прогнозування, управління, класифікація образів, категоризація, оптимізація.
2. Мета і завдання дослідження, плановані результати
Метою даної магістерської дисертації є дослідження і розробка методів, алгоритмів і програмного забезпечення для імітаційного моделювання руху автономного автомобіля. Для вирішення поставленої мети, необхідно вирішити ряд завдань:
- Розглянути сучасні методи комп'ютерного моделювання динамічних систем.
- Вивести рівняння руху модельованого автомобіля, скласти базу нечітких правил і застосувати метод дефаззифікації.
- Огляд і порівняння нейронних мереж для управління автомобілем.
- Застосування сучасних евристичних алгоритмів для навчання нейронної мережі.
Для вирішення поставлених завдань, необхідно виконати аналіз існуючих методів, виділити їх переваги, недоліки та вибрати найбільш перспективні з них.
3. Нечітка логіка
Нечітка логіка [2] – це форма багатозначної логіки, в якій істинні значення змінних можуть бути будь–якими дійсними числами від 0 до 1, включаючи обидва. Він використовується для обробки концепції часткової істини, де значення істини може варіюватися між повністю істинним і повністю хибним. Навпаки, в булевої (двійковій) логіці істинними значеннями змінних можуть бути тільки цілі значення 0 або 1.
Наприклад, в двійковій логіці, ми можемо сказати, що ми маємо стакан гарячої води (тобто 1 або високий логічний рівень) або склянку холодної води (див. мал. 3.1), тобто (0 або низький логічний рівень), але в нечіткої логіці, ми можемо сказати, що ми маємо склянку теплої води (ні гарячий, ні холодний, тобто десь між цими двома крайніми станами).
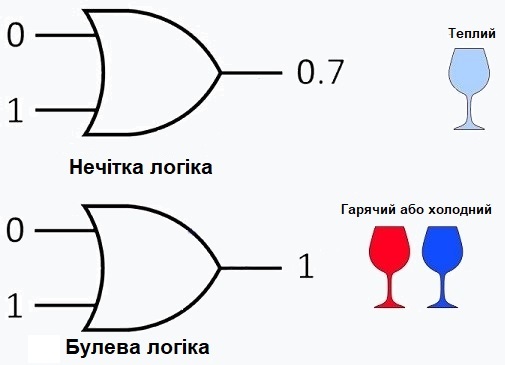
Малюнок 3.1 – Нечітка і булева логіка
Основними перевагами систем нечіткої логіки є:
- Системи нечіткої логіки є гнучкими і дозволяють змінювати правила.
- Такі системи також приймають навіть неточну, спотворену і хибну інформацію.
- Системи нечіткої логіки можуть бути легко спроектовані.
- Оскільки ці системи пов'язані з людськими міркуваннями та прийняттям рішень, вони корисні при формуванні рішень в складних ситуаціях в різних типах додатків.
Системи нечіткої логіки можуть використовуватися в автомобільних системах, таких як автоматичні коробки передач. Додатки в області побутових приладів включають в себе мікрохвильові печі, кондиціонери, пральні машини, телевізори, холодильники, пилососи і т. д.
Базова архітектура нечіткої логічної системи складається з наступних модулів і приведена на малюнку 3.2.
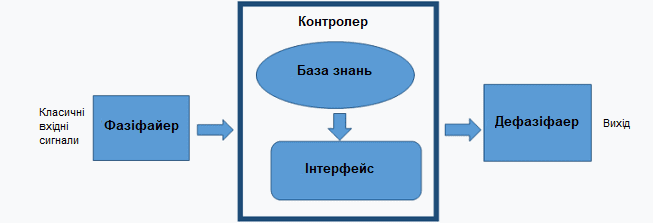
Малюнок 3.2 – Базова архітектура нечіткої логічної системи
Фазіфаер (Fuzzifier або оператор розмиття). Він приймає виміряні змінні в якості вхідних даних і перетворює числові значення в лінгвістичні змінні. Він перетворює фізичні значення, а також сигнали помилок в нормалізоване нечітке підмножина, яке складається з інтервалу для діапазону вхідних значень і функцій приналежності, які описують ймовірність стану вхідних змінних. Вхідний сигнал в основному поділений на п'ять станів, таких як: великий позитивний, середній позитивний, малий, середній негативний і великий негативний.
Контролер. Він складається з бази знань і механізму виведення. База знань зберігає функції приналежності і нечіткі правила, отримані шляхом знання роботи системи в середовищі. Механізм виведення виконує обробку отриманих функцій приналежності і нечітких правил. Іншими словами, механізм виведення формує вихідні дані на основі лінгвістичної інформації.
Дефазіфаер (Defuzzifier або оператор відновлення чіткості). Він виконує зворотний процес фазіфаера. Іншими словами, він перетворює нечіткі значення в нормальні числові або фізичні сигнали і відправляє їх у фізичну систему для управління роботою системи.
3.1 Застосування нечіткої логіки для імітації руху автономного автомобіля
Мета модельованого автомобіля полягає в тому, щоб досягти кінцевої лінії, не стикаючись зі стінами, і вивести траєкторію руху (включаючи положення автомобіля для кожного моменту часу, значення датчика і кут повороту керма) у вигляді текстового файлу, а потім відобразити на графічному інтерфейсі.
Розроблюваний автомобільний симулятор використовує нечітку систему управління, щоб імітувати рух автономного автомобіля на карті (див. мал. 3.3).
Малюнок 3.3 – Імітації руху автономного об'єкта
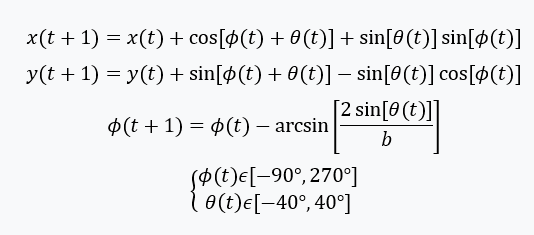
Вхід містить три сенсора відстані автомобіля (спереду, 45 градусів вліво і вправо), які можна отримати з певного рівняння руху, положення автомобіля і кута між автомобілем і горизонтальною віссю. Вихідним сигналом є кут повороту керма.
Рівняння руху модельованого автомобіля виглядають наступним чином:
де:
- Φ(t) – кут між автомобілем і горизонтальною віссю;
- b – довжина модельованого автомобіля;
- x і y – координати автомобіля;
- θ – кут повороту керма.
4. Мережа радіально–базисних функцій
Мережа радіально–базисних функцій [3] в математичному моделюванні – це штучна нейронна мережа, яка використовує радіально–базисні функції в якості функції активації. Виходом мережі є лінійна комбінація радіально–базисних функцій входу і параметрів нейрона. Мережі радіально–базисних функцій мають багато застосувань, зокрема, такі як апроксимацію функції, прогнозування часових рядів, завдання класифікації і управління системою. Вони були вперше сформульовані в статті 1988 Брумхед і Лоу, обидва дослідники з Royal Signals and Radar Establishment.
Мережі радіально–базисних функцій (МРБФ) зазвичай мають три шари (див. мал. 4.1): вхідний шар, прихований шар з нелінійної РБФ функцією активації та лінійний вихідний рівень.
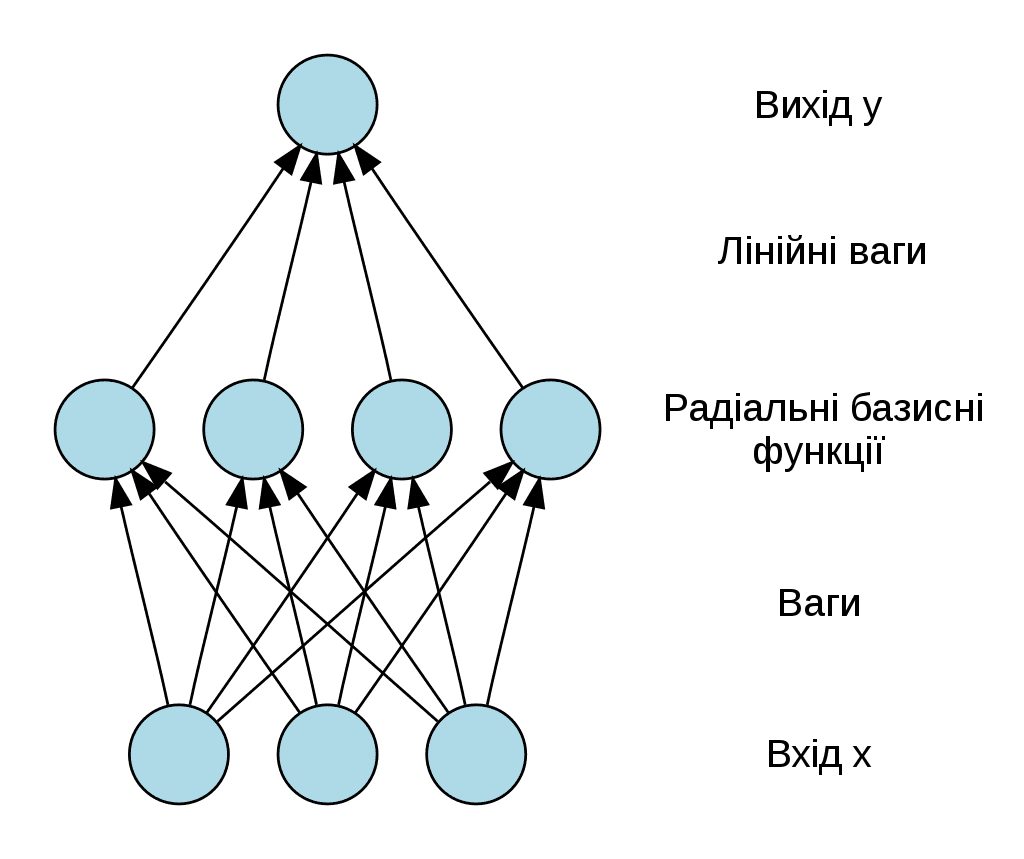
Малюнок 4.1 – Архітектура мережі радіально–базисних функцій
4.1 Навчання мережі РБФ
Автомобільний симулятор використовує генетичний алгоритм (ГА) та оптимізацію рою частинок (ОРЧ) для навчання мережі радіально–базисних функцій яка буде керувати автомобілем.
Генетичний алгоритм [4] – це евристичний алгоритм пошуку, який використовується для вирішення завдань оптимізації та моделювання шляхом випадкового підбору, комбінування і варіації шуканих параметрів з використанням механізмів, аналогічних природному відбору в природі. Є різновидом еволюційних обчислень, за допомогою яких вирішуються оптимізаційні задачі з використанням методів природної еволюції, таких як успадкування, мутації, відбір і кросинговер. Відмінною особливістю генетичного алгоритму є акцент на використання оператора «схрещування», який виробляє операцію рекомбінації рішень–кандидатів, роль якої аналогічна ролі схрещування в живій природі.
Оптимізація рою частинок [5] – метод чисельної оптимізації, для використання якого не потрібно знати точного градієнта оптимізуемої функції.
ОРЧ був доведений Кеннеді, Еберхарт і Ши і спочатку призначався для імітації соціальної поведінки. Алгоритм був спрощений, і було помічено, що він придатний для виконання оптимізації. Книга Кеннеді і Еберхарта описує багато філософських аспектів ОРЧ і так званого ройового інтелекту. Велике дослідження додатків ОРЧ зроблено Полі. ОРЧ оптимізує функцію, підтримуючи популяцію можливих рішень, які називаються частками, і переміщаючи ці частинки в просторі рішень згідно простої формули. Переміщення підкоряються принципу найкращого знайденого в цьому просторі положення, яке постійно змінюється при знаходженні частинками більш вигідних положень.
Ген/координата ОРЧ визначається як три параметра МРБФ (w, m, σ) параметра МРБФ вимірювань. Функція придатності – це середня дисперсія очікуваного результату набору даних і результату МРБФ в конкретному вхідному випадку. Найменше значення придатності – кращий параметр МРБФ.
Структура мережі радіально–базисних функцій приведена на малюнку 4.2.
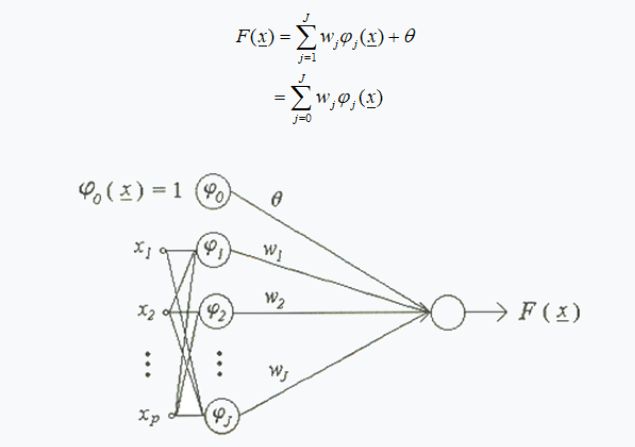
Малюнок 4.2 – Структура мережі радіально–базисних функцій
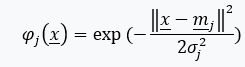
Де х являє собою набір вхідних даних, а φj (x) це функція Гаусса:
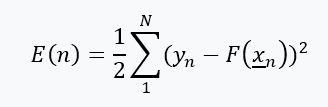
де w, m и σ параметри оптимізації алгоритму. Функція придатності має наступний вигляд:
де y це очікуваний результат, а F(x) це результат МРБФ. На малюнку 4.3 наведено алгоритм навчання мережі радіально–базисних функцій [6] за допомогою генетичних алгоритмів/оптимізації рою частинок.
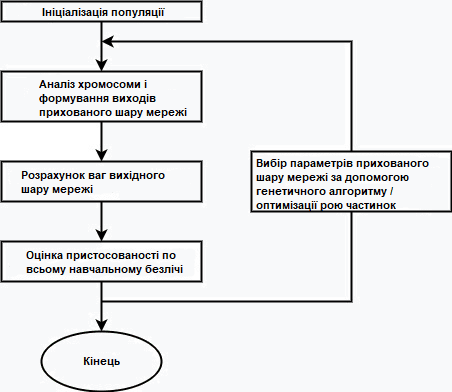
Малюнок 4.3 – Алгоритм навчання РБФ мережі за допомогою генетичних алгоритмів / оптимізації рою частинок
Висновки
Засновані на теорії нечітких множин методи побудови комп'ютерних нечітких систем суттєво розширюють області застосування комп'ютерів. Останнім часом нечітке управління є однією з найактивніших і найрезультативніших областей досліджень застосування теорії нечітких множин. Нечіткі методи допомагають керувати домною і прокатним станом, автомобілем і поїздом, розпізнавати мову і зображення, проектувати роботів, що володіють дотиком і зором. Нечітка логіка, в основному, забезпечує ефективні засоби відображення невизначеностей і неточностей реального світу. Наявність математичних засобів відображення нечіткості вихідної інформації дозволяє побудувати модель, адекватну реальності.
Нечіткі числа, одержувані в результаті «не цілком точних вимірювань», багато в чому аналогічні розподілам теорії ймовірностей, але в порівнянні з ймовірними методами, методи нечіткої логіки дозволяють різко скоротити обсяг вироблених обчислень, що, в свою чергу, призводить до збільшення швидкодії нечітких систем.
Нейроуправленіе динамічними об'єктами є новим перспективним напрямком, що знаходяться на стику таких дисциплін, як автоматичне керування, штучний інтелект, нейрофізіологія. Нейронні мережі мають ряд унікальних властивостей, які роблять їх потужним інструментом для створення систем управління: здатністю до навчання на прикладах і узагальнення даних, здатністю адаптуватися до зміни властивостей об'єкта управління та зовнішнього середовища, придатністю для синтезу нелінійних регуляторів, високою стійкість до пошкоджень своїх елементів в силу спочатку закладеного в нейромережевому архітектуру паралелізму.
Радіально–базисні нейронні мережі мають ряд переваг над іншими архітектурою мереж. По–перше вони мають всього один прихований шар, що дозволяє звільнити розробника від вирішення питання про кількість прихованих шарів і полегшує реалізацію. По–друге, отримані лінійні комбінації можна оптимізувати за допомогою відомих методів лінійної оптимізації. У зв'язку з цим радіально–базисні нейронні мережі швидко навчаються.
Список джерел
- Driving to Safety. How Many Miles of Driving Would It Take to Demonstrate Autonomous Vehicle Reliability? [Электронный ресурс]. – Режим доступа: https://www.rand.org/pubs/research_reports/RR1478
- Что такое нечеткая логика (fuzzy logic): принцип работы, примеры, применение [Электронный ресурс]. – Режим доступа: http://digitrode.ru/articles/1242
- Сеть радиально-базисных функций [Электронный ресурс]. – Режим доступа: https://ru.wikipedia.org/wiki/Сеть_радиально-базисных_функций
- Генетический алгоритм [Электронный ресурс]. – Режим доступа: https://ru.wikipedia.org/wiki/Генетический_алгоритм
- Метод роя частиц [Электронный ресурс]. – Режим доступа: https://ru.wikipedia.org/wiki/Метод_роя_частиц
- Введение в RBF сети [Электронный ресурс]. – Режим доступа: https://basegroup.ru/community/articles/rbf