
УДК 004.85
ОБУЧЕНИЕ СЕТИ РБФ С ПОМОЩЬЮ ГА И ОРЧ ДЛЯ СИМУЛЯЦИИ ДВИЖЕНИЯ САМОУПРАВЛЯЕМОГО АВТОМОБИЛЯ
Д.А. Пащенко
магистрант, Донецкий национальный технический университет
E–mail: pashektor77@gmail.com
Аннотация
Пащенко Д.А. Обучение сети РБФ с помощью ГА и ОРЧ для симуляции движения самоуправляемого автомобиля. Данная работа посвящена рассмотрению возможности обучения сети РБФ с помощью эвристических алгоритмов для симуляции движения самоуправляемого автомобиля. Результаты исследования показывают, что радиально–базисные нейронные сети имеют ряд преимуществ над другими архитектурами сетей и пригодны для обучения сети РБФ.
Ключевые слова: генетический алгоритм, оптимизация роя частиц, сеть радиальнобазисных функций, Гауссова функция, нейрон.
Введение.
При современном уровне развития техники, когда даже бытовые приборы оснащаются микропроцессорными устройствами, все более актуальным становится разработка новых систем автоматического управления.
Но в связи с возрастающей сложностью объектов управления и с увеличением требований к системам управления за последнее десятилетие резко повысилась необходимость в создании более точных, более надежных систем управлении, обладающих большими функциональными возможностями.
Интеллектуальные системы на основе искусственных нейронных сетей (ИНС) позволяют с успехом решать проблемы идентификации и управления, прогнозирования, оптимизации. Известны и другие, более традиционные подходы к решению этих проблем, однако они не обладают необходимой гибкостью и имеют существенные ограничения на среду функционирования.
Нейронные сети позволяют реализовать любой требуемый для процесса нелинейный алгоритм управления при неполном, неточном описании объекта управления (или даже при отсутствии описания), создавать мягкую адаптацию, обеспечивающую устойчивость системе при нестабильности параметров.
ИНС могут применяться для различных задач: аппроксимация функций, идентификация, прогнозирование, управление, классификация образов, категоризация, оптимизация.
В данной работе рассмотрены основные понятия о сети радиально–базисных функций, а также возможность обучения сети РБФ с помощью генетического алгоритма и оптимизации роя частиц для симуляции движения самоуправляемого автомобиля.
Сеть радиально–базисных функций
Сеть радиально–базисных функций [1] в математическом моделировании – это искусственная нейронная сеть, которая использует радиально–базисные функции в качестве функции активации. Выходом сети является линейная комбинация радиально–базисных функций входа и параметров нейрона. Сети радиально–базисных функций имеют много применений, в частности, такие как аппроксимацию функции, прогнозирования временных рядов, задачи классификации и управления системой. Они были впервые сформулированы в статье 1988 Брумхед и Лоу, оба исследователи из Royal Signals and Radar Establishment.
Сети радиально–базисных функций (СРБФ) обычно имеют три слоя (см.рис.1): входной слой, скрытый слой с нелинейной РБФ функцией активации и линейный выходной уровень.
Вход можно моделировать как вектор действительных чисел x ∈ R2. Тогда выход сети является скалярной функцией входного вектора φ:Rn→R, и имеет следующий вид (уравнение 1):
где N – количество нейронов в скрытом слое, ci центральный вектор для нейрона i, а ai – вес нейрона i в линейном выходе нейронов. Функции, которые зависят только от расстояния от центра вектора, являются радиально симметричными относительно этого вектора, следовательно, называются радиально–базисными функциями. В базовой форме все входы связаны с каждым скрытым нейроном. Нормой, как правило, избирается Евклидово расстояние, хотя расстояние Махаланобиса, в общем, более подходит и радиальнобазисная функция обычно считается распределением Гаусса (уравнение 2):

Гауссовы базисные функции близки к центральному вектору (уравнение 3) в том смысле, что

то есть изменение параметров одного нейрона имеет лишь небольшой эффект для входных значений, которые находятся далеко от центра этого нейрона.

Рисунок 1 – Архитектура сети радиально–базисных функций
Благодаря гибким условиям на форму функции активации, РБФ сети являются универсальными апроксиматорами на компактном пространстве Rn. Это означает, что сеть РБФ с достаточным количеством скрытых нейронов может апроксимировать любую непрерывную функцию на замкнутом ограниченном множестве с произвольной точностью.
Параметры ai, ci, βi определяются так чтобы оптимизировать соответствие между φ и данными.
Генетический алгоритм
Генетический алгоритм [2] – это эвристический алгоритм поиска, используемый для решения задач оптимизации и моделирования путём случайного подбора, комбинирования и вариации искомых параметров с использованием механизмов, аналогичных естественному отбору в природе. Является разновидностью эволюционных вычислений, с помощью которых решаются оптимизационные задачи с использованием методов естественной эволюции, таких как наследование, мутации, отбор и кроссинговер. Отличительной особенностью генетического алгоритма является акцент на использование оператора «скрещивания», который производит операцию рекомбинации решений–кандидатов, роль которой аналогична роли скрещивания в живой природе.
Генетические алгоритмы служат, главным образом, для поиска решений в многомерных пространствах поиска.
Этот набор действий повторяется итеративно, так моделируется «эволюционный процесс», продолжающийся несколько жизненных циклов (поколений), пока не будет выполнен критерий остановки алгоритма. Таким критерием может быть:
Таким образом, можно выделить следующие этапы генетического алгоритма:
Оптимизация роя частиц
Оптимизация роя частиц [3] (ОРЧ) – метод численной оптимизации, для использования которого не требуется знать точного градиента оптимизируемой функции.
ОРЧ был доказан Кеннеди, Эберхартом и Ши и изначально предназначался для имитации социального поведения. Алгоритм был упрощён, и было замечено, что он пригоден для выполнения оптимизации. Книга Кеннеди и Эберхарта описывает многие философские аспекты ОРЧ и так называемого роевого интеллекта. Обширное исследование приложений ОРЧ сделано Поли. ОРЧ оптимизирует функцию, поддерживая популяцию возможных решений, называемых частицами, и перемещая эти частицы в пространстве решений согласно простой формуле. Перемещения подчиняются принципу наилучшего найденного в этом пространстве положения, которое постоянно изменяется при нахождении частицами более выгодных положений.
Пусть f:Rn→R – целевая функция, которую требуется минимизировать, S – количество частиц в рое, каждой из которых сопоставлена координата xi∈Rn в пространстве решений и скорость vi∈Rn. Пусть также pi – лучшее из известных положений частицы i, a g – наилучшее известное состояние роя в целом. Тогда общий вид алгоритма оптимизации роя частиц таков.
Параметры ω, φp, и φg выбираются вычислителем и определяют поведение и эффективность метода в целом. Эти параметры составляют предмет многих исследований.
Исследование
Автомобильный симулятор использует генетический алгоритм (ГА) и оптимизацию роя частиц (ОРЧ) для обучения сети радиально–базисных функций (СРБФ) которая будет управлять автомобилем. Ген/координата ОРЧ определяется как три параметра СРБФ (w, m, σ) вектора смешанных измерений. Функция пригодности – это средняя дисперсия ожидаемого результата набора данных и результата СРБФ в конкретном входном случае. Наименьшее значение пригодности – лучший параметр СРБФ.
Структура сети радиально–базисных функций приведена на рисунке 2.

Рисунок 2 – Структура сети радиально–базисных функций
Где х представляет собой набор входных данных, а φj(x) это функция Гаусса (уравнение 4):

Где w, m, σ параметры оптимизации алгоритма. Функция пригодности (уравнение 5) имеет следующий вид:

Где y это ожидаемый результат, а F(x) это результат СРБФ. На рисунке 3 приведен алгоритм обучения сети радиально–базисных функций [4] с помощью генетических алгоритмов/оптимизации роя частиц.
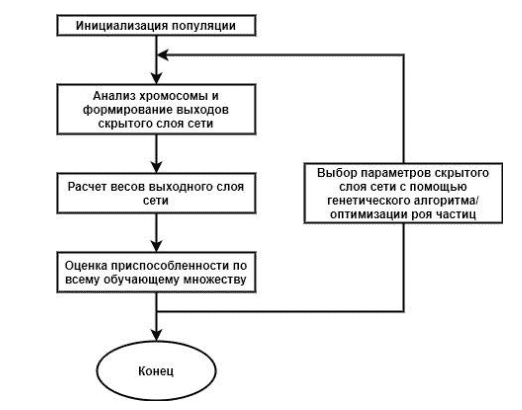
Рисунок 3 – Алгоритм обучения РБФ сети с помощью генетических алгоритмов/оптимизации роя частиц
Заключение
Нейроуправление динамическими объектами является новым перспективным направлением, находящимся на стыке таких дисциплин, как автоматическое управление, искусственный интеллект, нейрофизиология. Нейронные сети обладают рядом уникальных свойств, которые делают их мощным инструментом для создания систем управления: способностью к обучению на примерах и обобщению данных, способностью адаптироваться к изменению свойств объекта управления и внешней среды, пригодностью для синтеза нелинейных регуляторов, высокой устойчивость к повреждениям своих элементов в силу изначально заложенного в нейросетевую архитектуру параллелизма.
В процессе написания работы были рассмотрены основные понятия о сети радиально–базисных функций, генетическом алгоритме и оптимизации роя частиц, а также возможность обучения сети РБФ с помощью данных алгоритмов для симуляции движения самоуправляемого автомобиля.
Радиально–базисные нейронные сети имеют ряд преимуществ над другими архитектурами сетей. Вопервых, они имеют всего один скрытый слой, что позволяет освободить разработчика от решения вопроса о количестве скрытых слоев и облегчает реализацию. Во–вторых, полученные линейные комбинации можно оптимизировать с помощью известных методов линейной оптимизации. В связи с этим радиально–базисные нейронные сети быстро обучаются.
Литература