| ВЕБ СТРАНИЦА МАГИСТРА | ||
| АВТОРЕФЕРАТ ДИССЕРТАЦИИ | ||
| ||
| [ Главная ] [ Диссертация ] [ Библиотека ] [ Ссылки ] [ Контакты ] | ||
ОБЩАЯ ХАРАКТЕРИСТИКА РАБОТЫ Актуальность темы: Моделирование сетевых объектов с сосредоточенными параметрами (СОСП) является актуальной проблемой во всех областях науки и техники. В последние годы методы и средства моделирования интенсивно используются в реальных технических и технологических проектах для проверки правильности проектных решений и выступают тем самым, как важнейший фактор, гарантирующий качество проектирования, сокращение сроков внедрения проектов и освоения управляемых динамических систем обслуживающим персоналом. В последнее время делается упор на параллельное решение задач моделирования с использованием MPI-имплементаций алгоритмов. Задача данной работы заключается в разработке параллельных алгоритмов решения задачи моделирования систем управления сетевыми объектами с их последующей MPI-имплементацией в MIMD-структурах. Цель и задачи исследования: Объектом исследования является система управления динамическим сетевым объектом с сосредоточенными параметрами. Целью данной работы является решение задачи разработки параллельной MIMD-модели системы автоматического многосвязного управления шахтной вентиляционной сетью (ШВС). Область применения - угольная промышленность Украины, учебный процесс вузов. Значимость работы - данная работа важна для предметных областей, занимающихся динамикой сетевых объектов. Научная новизна: В последние 5 лет активно ведутся работы по модельной поддержке проектирования автоматизированных систем. Тема магистерской диссертации посвящена вопросам разработки параллельной модели многосвязной системы управления сетевым объектом на базе вычислительных систем MIMD-структуры. Такая постановка работы является новой и актуальной. Новизна работы заключается в разработке параллельных SPMD-алгоритмов функционирования MIMD-модели системы автоматического управления сетевым объектом. Практическое значение и реализация полученных результатов: Полученные результаты позволяют реализовать MIMD-модель системы автоматического управления сетевым объектом с сосредоточенными параметрами (ШВС) на системе Intel Paragon и кластере ПЭВМ. Экономическая эффективность - моделирование ускоряет разработку систем управления шахтными вентиляционными сетями, способствует повышению безопасности работ в шахтах. Значимость работы - данная работа важна для предметных областей, занимающихся динамикой сетевых объектов. 1. Математические модели, методы и вычислительные алгоритмы работы системы управления предназначены для использования в качестве MIMD-компоненты в распределенной параллельной моделирующей среде (РПМС). Данная РПМС используется для моделирования и анализа ШВС шахт Донецкой области. 2. Результаты данной работы в научном и обучающем контексте будут использоваться как эмуляторы для повышения уровня и качества знаний студентов, участвующих в разработках параллельных алгоритмов систем управления сетевыми динамическими объектами. А также для рабочего персонала шахт, участвующего в процессе управления воздухораспределением в ШВС с помощью параллельных вычислительных систем. СОДЕРЖАНИЕ РАБОТЫ В главе 1: рассматриваются основы системы управления потоком в ветви сетевого объекта с сосредоточенными параметрами. Приводятся:
где: K - коэффициент сжимаемости воздуха, Q - поток воздуха в ветви, R - сопротивление ветви, RR - сопротивление ветви (регулируемое), H - давление воздуха в ветви. Модель управляемой ветви:  САР - на данной схеме обозначает систему автоматического регулирования. Структура системы управления потоком: 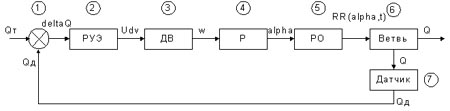 где: 1 - определитель DQ, 2 - релейный усилительный элемент, 3 - двигатель, 4 - редуктор, 5 - регулирующий орган, 6 - объект (в нашем случае Сетевой Объект с Сосредоточенными параметрами), 7 - датчик. Каждый из приведенных выше объектов системы управления выполняет определенную функцию, причем результаты выполнения многих из этих функций используются в последующих объектах структуры, т.е. высчитываются параметры, участвующие в дальнейшем процессе расчетов. Блок-схема работы модели управляемой ветви: 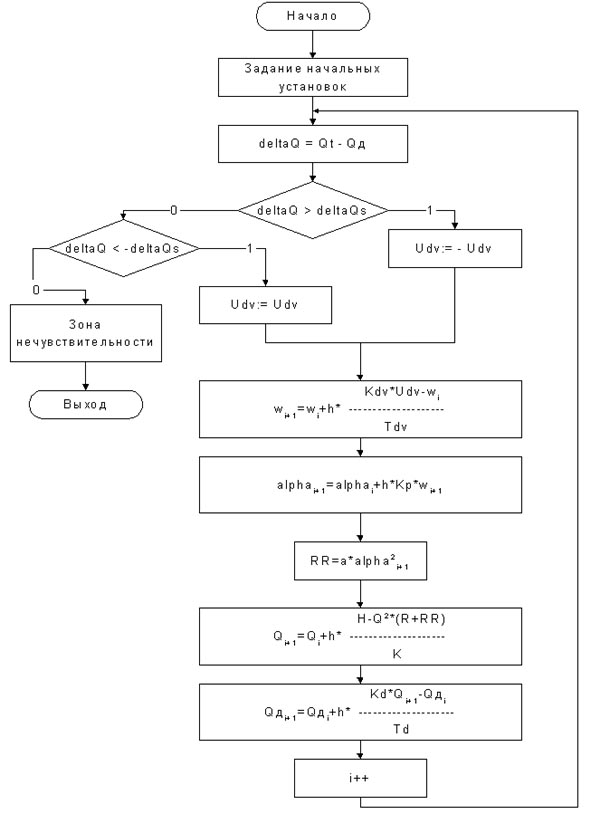 Программная реализация модели системы автоматического управления "ветвь-САУ": Языком программирования, как было упомянуто выше, был выбран язык C++. И для напоминания обоснован данный выбор решающими факторами: - наличие MPI-модуля для данного языка, что впоследствии облегчит MPI-имплементацию алгоритмов. С++ не единственный язык программирования, для которого существует MPI-модуль, но выбор был остановлен на нем в связи с тем, что при отладке работы моделей в РПМС возникает необходимость создания динамических библиотек, так называемых dll (dynamic linked library). И их создание с помощью других языков программирования может вызвать затруднения. - наличие классов, объектов для более простой работы с большими объектами моделирования. Значимость второго фактора при решении задачи построения модели системы управления "ветвь - САУ" практически не заметна, но принимает совершенно иной вид при реализации многосвязной системы управления. Это связано с возможностью представления ветвей модели "сеть - САУ", как объектов одного класса с одинаковыми параметрами, что облегчит обработку их реальных значений в дальнейшем. Перейдя непосредственно к реализации программы можно отметить, что блок-схема работы модели управляемой ветви претерпит незначительные изменения, и связано это в первую очередь с продолжительностью моделирования процессов в ветви. Так как в реальной жизни система автоматического управления находится в рабочем режиме постоянно, то необходима соответствующая программная реализация данного режима. В связи с тем, что комплексно наша система является не только рабочей (использование шахтами), но и обучающей, то возможно задание периода моделирования. Таким образом, в блок-схеме работы модели управляемой ветви, блок "Зона нечувствительности" реализует остановку двигателя (осуществляющего передвижение двери - "шторы") из-за установления в ветви требуемого расхода воздуха, а последующий блок "Выход" заменяется проходом на следующий цикл работы системы. Анализ полученных результатов: Программная реализация модели системы управления "ветвь - САУ" была выполнена успешно, что отразилось в приведенных далее визуализированных результатах. В качестве средства визуализации использовалась программа, написанная на языке С, с использованием алгоритма Брезенхема построения векторов. Ниже отображены результаты моделирования. По данным графикам можно судить о правильном выполнении задач системой управления. Вначале устанавливается требуемый режим расхода воздуха - 10 м3/с. После чего, в обоих случаях уменьшается QТ до 6 м3/с. А затем расход воздуха в ветви приподнимается до 9 м3/с, либо опускается до 5 м3/с. И в обоих случаях заметна работа системы управления, которая обеспечивает требуемый расход воздуха. 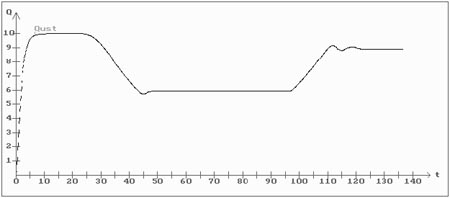 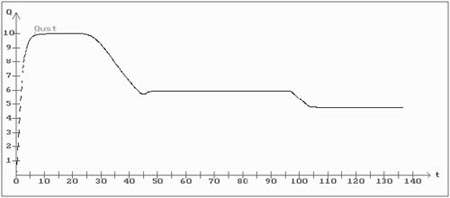 В главе 2: рассматривается разработка модели системы многосвязного управления (МСАУ). Приводятся:
Многосвязная система автоматического управления (МСАУ) - система, в которой одновременно действуют многие системы управления, взаимосвязанные между собой двумя основными способами: - через объект управления, - информационные связи. В первом способе САУ, находясь непосредственно во взаимодействии с объектом управления, "чувствуют" изменения в других ветвях и реагируют на эти изменения. Таким образом возмущения в сети с помощью САУ ликвидируются. При помощи второго способа можно организовать связь между регуляторами вентилятора главного проветривания (РВГП) и групповыми регуляторами потоков (ГРП). Вентилятор главного проветривания создает разность давлений, необходимую для обеспечения требуемого воздухораспределения в вентиляционной сети [1]. Регуляторы потоков воздуха могут находиться в узлах, в которых сходятся несколько выемочных участков. МСАУ ШВС - многосвязная система автоматического управления шахтной вентиляционной сети. Структура системы "Сеть - САУ": 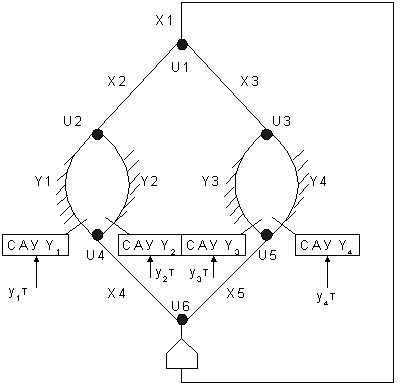 На данном рисунке блоки САУ Y1-4 обозначают регуляторы, находящиеся в соответствующих ветвях, а сами ветви Y1-4 являются выемочными участками. Выемочные участки являются основными объектами проветривания на угольных шахтах [1]. Для дальнейшего рассмотрения системы многосвязного управления приведем пояснения к данной схеме: у1т - у4т - требуемые значения потока воздуха в ветвях. U1-U6 - узлы сети. Х1-Х5 - ветви дерева. Y1-Y4 - ветви антидерева. Структура модели МСАУ ШВС: Итак, МСАУ ШВС - многосвязная система автоматического управления шахтной вентиляционной сети. Структурная схема, приведена на данном рисунке: 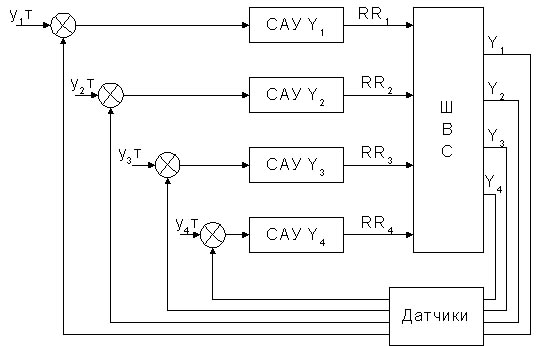 После чего представим модель сети на следующем рисунке: 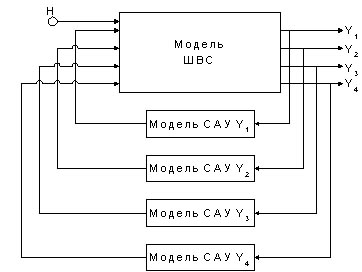 В главе 3: система управления дополняется групповыми регуляторами с соответствующим алгоритмом работы. В главе 4: рассматривается параллельная программная реализация всех рассмотренных выше алгоритмов. В главе 5: проводится анализ отладки системы управления на кластере ПЭВМ. ОСНОВНЫЕ РЕЗУЛЬТАТЫ 1. Системы управления сетевыми динамическими объектами относятся к классу сложных динамических объектов моделирования. 2. Предложена блок-схема параллельного SPMD-алгоритма MIMD-модели системы управления сетевым объектом. 3. Проведена программная имплементация модели в С-среде и подготовка к составлению MPI-программы MIMD- модели. Отладка ведется на MIMD-системе Intel Paragon и кластере ПЭВМ. Выводы: параллельное моделирование открывает новые возможности модельной поддержки разработок и исследований многосвязных систем управления сложными сетевыми объектами. Перспективой дальнейших работ является реализация моделей на удаленных параллельных вычислительных системах Штуттгартского университета. ЛИТЕРАТУРА 1. Абрамов Ф.А., Фельдман Л.П., Святный В.А. Моделирование динамических процессов рудничной аэрологии. Киев, Наукова думка, 1981, 291 с. 2. Святный В.А. Диссертация - Моделирование аэрогазодинамических процессов и разработка систем управления проветриванием угольных шахт. Донецк, 1985, 408 с. 3. Святний В.А. Проблеми паралельного моделювання складних динамічних систем. Наукові праці ДонДТУ, Серія ІКОТ, вип. 6., 1999, с. 6-14. |
||
| Designed by BonVlad | ||