УДК 622. 678
СИСТЕМА АВТОМАТИЧЕСКОЙЗАГРУЗКИ СКИПОВ
Павленко Д.В., Коваленко Е.А., студенты;
Никулин Э.К., доц., к.т.н.
Анализ работы скиповых подъемов шахт показывает, что в настоящее время загрузка скипов малоэффективна из-за низкого уровня автоматизации этого процесса, в результате чего значительная часть (5-10)% загружаемого в скип твердого материала попадет в приямок ствола. Очистка приямков при этом осуществляется в основном вручную, на что затрачивается большое количество времени и неквалифицированного труда. Установлено также, что уровень механизации работ по очистке стволов от просыпавшегося материала составляет не более (15-20)%, а применяемые средства механизированной очистки имеют низкую надежность, высокий уровень материальных затрат на их монтаж и обслуживание. Кроме того, недостаточное контролирование уровня заполнения скипов приводит к перерасходу электроэнергии на подъеме и ухудшает работу подъемных канатов. В связи с этим разработка системы автоматической загрузки скипов, направленной на устранение этих недостатков, является задачей актуальной.
Поставленная задача может быть решена на основе использования объемного способа загрузки скипов, а аппаратная часть системы - на основе применения метода логического синтеза на интегральной схемотехнике.
При разработке указанной системы автоматизации были приняты за основу некоторые хорошо зарекомендовавшие себя в эксплуатации средства механизации и контроля. К ним относятся: загрузочные устройства бункерного типа с загрузочными воронками, секторные затворы и дозаторы - питатели, а также дискретные датчики положения (концевые выключатели), датчики уровней в бункерах-накопителях и в загрузочной воронке, весоизмерительные средства транспортных конвейеров (стандартные электрогидравлические весы). Вместо конвейерных весов, как вариант, могут быть применены стандартные трансформаторы тока, встраиваемые в пускатели транспортных конвейеров.
Функциональная схема системы автоматической загрузки скипов приведена на рисунке 1.
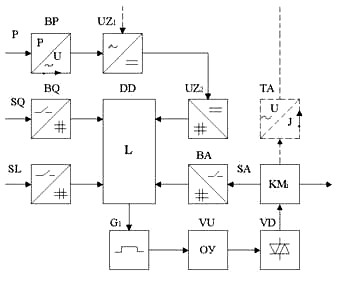
Рисунок 1 - Функциональная схема системы автоматической загрузки скипов
Входными сигналами являются сигналы, получаемые от контактных и аналоговых датчиков. В качестве контактных датчиков используются концевые выключатели SQ секторных затворов, дозаторов-питателей, положения скипа в месте загрузки и разгрузки, а также контактные уровнемеры SL бункеров-накопителей и загрузочных воронок, блок-контакты SA магнитных пускателей КМ. В качестве аналоговых датчиков приняты конвейерные весы ВP или трансформаторы тока ТА магнитных пускателей приводов конвейеров.
Наличие двух типов датчиков обусловило применение и двух типов преобразователей: неэлектрических сигналов в цифровые (BQ, BL, BA) и аналоговых электрических сигналов в цифровые (UZ1, UZ2). В качестве первых преобразователей использованы транзисторные оптопары (AОT 122А) в стандартном включении, обеспечивающие гальваническую развязку выходных цепей датчиков и входных цепей блока логики L, а также выполняющие функции формирования стандартных уровней логических сигналов, необходимые для работы блока L. Для этих же целей используются и формирователи второго типа, в качестве которых применены компараторы на операционных усилителях. В блоке логики L формируются команды управления, которые после временной задержки, выполненной на одновибраторе G1, поступают на тиристорную оптопару ОУ (30У103 Г) и семистор VD (КУ208 Г), выполняющие гальваническую развязку выходных цепей блока L и цепей питания контакторных катушек магнитных пускателей КМ.
Управление секторными затворами и питателем осуществляется в автоматическом режиме при помощи управляющих команд типа "открыть" - "закрыть", а управление транспортными конвейерами, подающими уголь в бункер-накопитель, - при помощи информационных команд-советов, индицируемых на световом табло оператора, который управляет работой конвейеров через пульт управления, входящий в состав аппаратуры АУК.1М.
Перечень ссылок
1. Рудничный транспорт и механизация вспомогательных работ. Под общей ред. Б.Ф. Братченко. - М.: Недра, 1978.- 423с.
Публикация в сборнике научных трудов ІІ-й международной научно-технической конференции аспирантов и студентов "Автоматизация технологических объектов и процессов. Поиск молодых" (Донецк-2002).
Авторы: Павленко Д.В., Коваленко Е.А., студенты;
Никулин Э.К., доц., к.т.н.