|
Библиотека - Статья 6 Савицкий А.В.
Тема выпускной магистерской работы:
Создание тиристорного частотного преобразователя на IGBT-модулях вынесенной подачи угольного очистного комбайна Энергосберегающее регулирование
Авторы: сотрудники ГНПП "АСТЭС" НПК "Киевский институт автоматики"
Опубликовано в: Киевский институт автоматики Год опубликования: 2002 Статья представлена сотрудниками ГНПП "АСТЭС" НПК "Киевский институт автоматики". Август 2002 г.
Внедрение преобразователей частоты асинхронных электродвигателей дает неоспоримые экономические выгоды при регулировании расходов и давлений жидкостей и газов по сравнению с регулированием с помощью заслонок, клапанов, шаберов и других устройств, дросселирующих поток среды насосов и вентиляторов. При регулировании скоростью вращения с помощью преобразователей частоты экономия электроэнергии составляет 50% и более по сравнению с регулированием дросселированием, т.к. энергия не расходуется на преодоление противодавления [1]. Особенно это проявляется при значительных изменениях нагрузки технологического оборудования.
Ниже рассматриваются преимущества реализации энергосберегающих автоматических регуляторов на основе использования частотных преобразователей. В качестве примера для иллюстрации выбран регулятор питания барабанного котла.
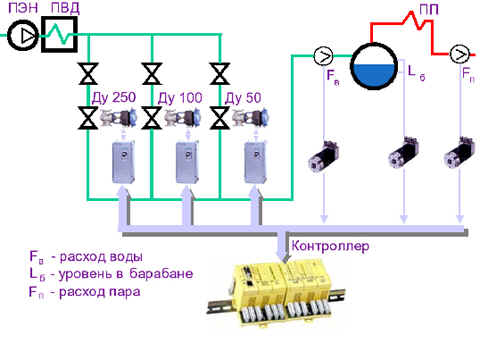 Рисунок 1 На рис.1 представлена типовая функциональная схема трёхимпульсного регулятора питания. Питательная вода к котлу поступает через один из трех регулирующих клапанов. Клапан с наименьшим условным проходом используется при пусках котла. Клапан со средним условным проходом - при пониженных нагрузках, а клапан с максимальным условным проходом - при номинальных нагрузках и пониженных (но не менее 70% от номинальных) нагрузках котла. Степень открытия клапанов регулируется импульсно с помощью трех исполнительных механизмов (ИМ) постоянной скорости (типа МЭО, МЭМ и др.). Соответственно, для управления исполнительными механизмами используются три пускателя (магнитных или бесконтактных электронных). Сигналы датчиков положения ИМ вводятся в контроллер для контроля положения, а также используются в алгоритме регулирования при пониженных нагрузках вместо сигнала расхода воды.
В традиционной схеме регулятора питания при снижении нагрузки ухудшается качество регулирования из-за нелинейности расходной характеристики тракта ПЭН - клапан - котёл от положения клапана. Этим, в частности, обусловлено применение трех регулирующих клапанов. Соответственно, наладка системы регулирования сложная, так как параметры настройки системы для каждого из клапанов индивидуальные.
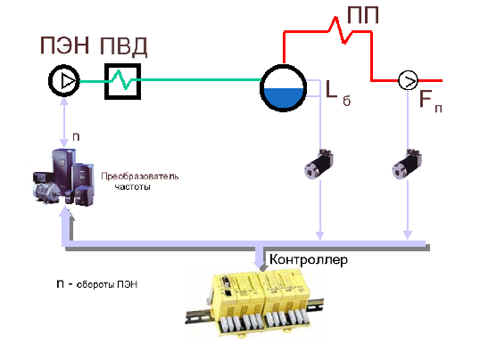 Рисунок 1 На рис.2 представлена структурная схема регулятора питания с преобразователем частоты. В данной схеме отпадает необходимость в регулировочных клапанах, т.к. расход воды регулируется в широких пределах изменением производительности питательного электронасоса (ПЭН) с помощью преобразователя частоты. Также, не требуются исполнительные механизмы с их датчиками положения и пускателями. В данной схеме нет сужающего устройства и датчика перепада на воде, т.к. производительность ПЭН определяется зависимостью от частоты, сигнал значения которой вводится в контроллер. Отсутствие клапанов и сужающего устройства снижает потери давления в трубопроводе и вследствие этого сокращает нагрузку на ПЭН. Представляется возможность, при необходимости, сократить участок трубопровода от ПЭН до барабана.
В отличие от традиционной схемы в данном случае регулирование не импульсное, а аналоговое, что может в результате дать лучшее качество регулирования. Преобразователи частоты обеспечивают настройку скорости изменения частоты в широких пределах (время разгона и торможения 0,1 - 600 с. и более), что значительно перекрывает аналогичные характеристики электрических исполнительных механизмов постоянной скорости (время полного хода ИМ типа МЭО, МЭМ - 10 - 250 с.). Таким образом, можно настраивать качество регулирования уровня в барабане учитывая ограничения технологического оборудования (в данном случае ПЭН).
Интеграция частотных преобразователей в системы управления осуществляется посредством распространённых интерфейсов (RS-232, RS-485, сеть PROFIBUS) и с помощью аналоговых (0-10 В, 4-20 мА, 0-5 кОм) и дискретных сигналов (больше, меньше).
Таким образом, применение частотных преобразователей в системах регулирования даёт предпосылки к улучшению качества регулирования, упрощает структуру и реализацию системы, позволяет интегрироваться в современные системы управления.
Примером реализации энергосберегающего регулятора может быть автоматическая система регулирования (АСР) производительности ПЭН [2]. АСР производительности ПЭН предназначена для регулирования производительности 3-х ПЭН, работающих на два котла. Автоматическое регулирование производительности ПЭН устанавливает положение питательных клапанов на минимально возможное дросселирование, обеспечивая, в то же время, запас хода клапанов для регулирования уровня в барабанах котлов.
Другим примером энергосберегающего регулирования может быть его применение в системе программного управления технологическим режимом термической печи с плоскими нагревателями ПРН-25 [3]. В процессе управления стадиями термообработки изделий в печи (нагрев, выдержка, охлаждение) в широких пределах изменяется расход воздуха, подаваемого в нагреватели. Применение частотного регулирования производительности дутьевого вентилятора должно привести к улучшению качества регулирования нагрева, выдержки и охлаждения, а также к экономии электроэнергии.
Список литературы 1. Регулирование скорости вращения насосов с помощью преобразователя частоты SAMI. Рекламный материал ABB BROWN BOWERI.
2. АСР производительности ПЭН КТЭЦ-5. Материалы проекта. ГНПП АСТЭС НПК Киевский институт автоматики - ЛьвовОРГРЭС. 2000 г.
3. Система программного управления малоинерционной термической печью с плоскими радиационными нагревателями ПРН-25. Рабочий проект. ГНПП АСТЭС НПК Киевский институт автоматики. 1999 г.
Первоисточник: http://astes.nm.ru/sem2.html |
| Рус | Укр | Eng | ||
Биография
          | ||||