|
|
|
|
|
|
|
|
|
|
|
|

|
Магiстерська роботаСистема керування
|
|
АвторефератАктуальнiсть роботиДана робота присвячена вирiшенню проблем, що є дуже актуальними для вугiльноï промисловостi, а особливо у Донецькому регiонi, де далеко не всi шахти оснащенi системами автоматичного керування процесами виробництва. На теперiшнiй час iснує велика кiлькiсть розробок у цiй областi, але кожна з них має своï сильнi та слабi сторони. Це означає що досi iснує необхiднiсть розробки такоï системи керування концентрацiєю метану, що була б кращою за iснуючi за багатьма параметрами: надiйнiстю, щвидкiстю реагування на змiну значення факторiв впливу, якiсть зберiгання накопленоï iнформацiï, а також вартiстю всiєï системи. Мета роботиМетою даноï роботи є розробка системи керування концентрацiєю метану у шахтних виробiтках. В авторефератi наводиться частина роботи, присвячена розробцi системи збору та аналiзу iнформацiï об концентрацiï метану у шахтних виробiтках. Цей документ подiляється на 2 частини. Першою частиною є розробка пiдсистеми опиту iнформацiï, що вiдповiдає за збiр даних вiд датчикiв контролю концентрацiï метану. Друга частина документу - розробка пiдсистеми представлення отриманих даних, що вiдповiдає за аналiз, збереження та графiчне вiдображення даних, що надiйшли. ВступIнтенсифiкацiя гiрницьких робiт є основним напрямком пiдвищення продуктивностi вугiльних шахт, та визначає науково-технiчний процес у вугiльноï промисловостi. На забезпечення iнтенсивного видобутку вугiлля у рiзноманiтних умовах спрямовано рiшення ряду наукових проблем гiрницькоï науки серед яких важливе мiсце займають проблеми боротьби з газовим бар´єром, що обмежує продуктивнiсть та негативно впливає на безпеку працi шахтарiв. Проблеми керування провiтрюванням викликали необхiднiсть у глибокому теоретичному та експеремiнтальному дослiджування схем провiтрювання дiлянок, як об´єктiв керування. Також актуальним напрямком є розробка систем збору та аналiзу iнформацiï про стан повiтря у шахтних виробках та вмiст шкiдливих газiв та речовин. Шахтна вентиляцiйна система включає об´єкти провiтрювання, воздухоподаючi i воздуховiдводячi виробки, вентиляцiйнi спорудження i джерела тяги - вентилятори головного провiтрювання (ВГП), встановлюванi на поверхнi, i пiдземнi допомiжнi вентилятори.Об´єктами провiтрювання є очиснi i пiдготовчi забоï, а також гiрськi виробки, у яких правилами безпеки регламентуються величини витрат повiтря i концентрацiï шкiдливих домiшок. Воздухоподаючi та воздухоотводячi виробки - це стовбури, штреки, ухили, шурфи, по яких надходять свiжi струменi повiтря до об´єктiв провiтрювання i придiляються на поверхню вихiднi струменi зi шкiдливими домiшками. Об´єкти провiтрювання, воздухоподаючi i воздухоотводячi виробки утворять шахтну вентиляцiйну мережу. Вентиляцiйнi спорудження забезпечують пропуск повiтря, регулювання витрат повiтря у виробках вентиляцiйноï мережi, iзоляцiю вентиляцiйних струменiв. Вентилятори головного провiтрювання створюють рiзницю тискiв, необхiдну для забезпечення необхiдного воздухоросподiлу у вентиляцiйнiй мережi. Вентилятори мiсцевого провiтрювання i вiдповiднi схеми подачi повiтря утворять засоби для провiтрювання тупикових вироблень. Вплив технологiчних процесiв, гiрночотехничних i гiрничогеологiчних умов шахти на вентиляцiйну систему мають характер збурювань, якi можна класифiкувати в такий спосiб: аеродинамiчнi впливи, що обурюють, що впливають на величину витрат повiтря у виробленнях (вiдкривання i закривання вентиляцiйних дверей, змiна опору виробок через наявнiсть у них транспорту, обвалення покрiвлi, змiна аеродинамiчного опору схем провiтрювання дiлянок у мiру подвигання вибоïв, змiна перетинiв виробок пiд дiєю сил гiрського тиску, у результатi завалiв i iн.); газодинамiчнi впливи, що обурюють, що змiнюють величину концентрацiй шкiдливих домiшок у вихiдних вентиляцiйних струменях (змiна газовидiлення в лавах при видобутку вугiлля, суфлярнi видiлення газу, газовидiлення з вiдбитого вугiлля, iрунти i покрiвлi шару й iн.); термодинамiчнi впливи, що обурюють, визначальнi температурнi режими об´єктiв провiтрювання; впливи джерел, що обурюють, пилу, вiд яких залежить пиловий режим об´єктiв провiтрювання й iнших вироблень. Шахтна вентиляцiйна система може знаходитися в нормальних i аварiйних режимах роботи. Метою даноï роботи є розробка системи збору та аналiзу концентрацiï метану у шахтних виробiтках. Цей проект подiляється на 2 частини. Першою частиною є розробка пiдсистеми опиту iнформацiï, що вiдповiдає за збiр даних вiд датчикiв контролю концентрацiï метану. Друга частина проекту - розробка пiдсистеми представлення отриманих даних, що вiдповiдає за аналiз, збереження та графiчного вiдображення даних, що надiйшли. 1. Система керування концентрацiєю метану в шахтних виробкахПроцес вентиляцiï як об´єкт керування характеризується наступними ознаками: наявнiстю загальноï задачi i єдиноï мети функцiонування для системи в цiлому (загальною задачею є нормалiзацiя складу атмосфери по метану у всiх дiючих виробках; цiль функцiонування системи - мiнiмiзацiя вiдхилень концентрацiï шкiдливих газiв у виробках шахти вiд заданого рiвня); значним числом взаємодiючих частин елементiв (велика розмiрнiсть мережi виробок, вироблених просторiв, наявнiсть вентиляторiв, вентиляцiйних споруджень, природних джерел тяги); можливiстю видiлення груп елементiв у пiдсистеми, що характеризуються самостiйними цiлями функцiонування (основними є дiльничнi пiдсистеми вентиляцiï); iєрархiчною структурою зв´язкiв пiдсистем i iєрархiєю критерiïв ефективностi функцiонування всiєï системи; складнiстю поводження системи, зв´язаноï з випадковим характером впливiв i зворотних зв´язкiв усерединi системи; високою надiйнiстю системи в цiлому, побудованоï з недостатньо надiйних елементiв. Тому при органiзацiï вентиляцiï переважає пiдхiд до забезпечення виробки витратою повiтря по максимально шкiдливому фактору. У рiзних виробках i по шахтi в цiлому такi визначальнi фактори можуть бути рiзнi. Так, на вугiльних шахтах переважним фактором у багатьох випадках є концентрацiя метану. По пiдтримуванню останньоï в припустимих межах забезпечується витрата повiтря в очисних вибоях, на дiлянках i по шахтi в цiлому. Витрата повiтря в пiдготовчих виробкях, проведених у порожнiх породах, буде визначатися вимогою пiдтримки припустимоï концентрацiï газiв вiд пiдривних робiт вимогою забезпечення мiнiмальноï запилиности. На глибоких шахтах витрата повiтря часто визначається тепловим фактором, тобто вимогою пiдтримки припустимоï температури повiтря (яка допускається рiзноï при рiзнiй швидкостi руху повiтря). Газовий склад атмосфери часто визначається такими джерелами газовидiлення, як пiдривнi роботи i дизельнi машини. Вони видiляють сумiш рiзних шкiдливих газiв. Оцiнка iнтенсивностi ïхнього видiлення в рiзних умовах є важкою задачею. Процес газовидiлення на шахтах у загальному випадку варто вважати стохостичними. Тому процес формування складу шахтноï атмосфери можна в цiлому вiднести до класу стохостичних об´єктiв, тому що не iснує однозначноï вiдповiдностi мiж вхiдними i вихiдними перемiнними. Керування технологiчними процесами повинне здiйснюватися по збурюванню. Але системи керування, цiлком iнварiантних до збурювань, для технологiчних процесiв практично не iснує через велике число рiзних збурювань, контроль яких часто виявляється принципово неможливим. При обмеженнi iнварiантостi до деякого рацiонального рiвня доцiльно використовувати керування по вiдхиленню. Дослiдженнями встановлено, що функцiя концентрацiï метану характеризується загазованiєм рiзноï частоти. При обмеженнi значення деякою припустимою величиною сдоп усi загазованiя є вiдхиленнями убiк перевищення. Вони зв´язанi з появою небезпечноï ситуацiï. При вiдсутностi автоматичного керування ситуацiєю єдиною реакцiєю на них є вiдключення електроенергiï на дiлянцi (що є потенцiйним джерелом запалення метаноповiтряноï сумiшi) i припинення процесу видобутку вугiлля. Оперативна лiквiдацiя таких загазованiй є основною задачею автоматичного керування вентиляцiєю, тому що в даному випадку зважуються задача забезпечення безперервностi технологiчного процесу i лiквiдацiï простоïв технологiчноï лiнiï по факторi газовидiлення i задача виключення небезпеки вибуху метану у виробках. Вiдхилення концентрацiï метану убiк зменшення в порiвняннi з припустимою концентрацiєю також повиннi вiдпрацьовуватися з погляду економiчноï доцiльностi керування, тому що зменшення витрати повiтря на вентиляцiю вироблень викликає iстотне зменшення витрат електроенергiï. Таким чином, системою керування повиннi вiдпрацьовуватися вiдхилення, викликуванi роботою виймаючой машини й iстотних змiн у газовому балансi дiлянки. Тому схема керування функцiєю по вiдхиленню не повинна розглядатися в якостi єдино можливоï, тому що в залежностi вiд реального спектра збурювань ïï ефективнiсть рiзна, i не можна розраховувати на те, що ця схема виявиться працездатноï стосовно газовоï ситуацiï у всiй вентиляцiйнiй мережi шахти, а не тiльки на виймаючой дiлянцi в окремiй виробцi. Зараз можливо використовувати такi могутнi засоби компенсацiï могутнiх газових збурювань низькоï частоти, як пiдземна дегазацiя, при якiй змiною розташування вакуумноï установки в просторi i параметрiв ïï роботи можна iстотно перерозподiлити газовий баланс. Можливо також керування безпосереднє джерелами збурювань. 2. Розробка апаратноï частини Основною частиною системи збору iнформацiï є мiкроконтролер Intel 8051. До складу системи також входять: Робота аналогово - цифрового перетворювача та блоку мультиплексування контролюється спецiальними сигналами, що надходять з портiв мiкроконтролера. Пiд час одного циклу роботи системи iнформацiя обробляється наступним чином: Пiсля опитування всiх сигналiв та отримання цифрових даних мiкроконтролер формує блок даних та передає його за допомогою послiдовного iнтерфейсу до робочоï станцiï для подальшоï обробки. При побудовi системи використаємо стандартнi мiкросхеми: Для забезпечення роботи мiкроконтролера та АЦП необхiдний генератор тактовоï частоти 12 МГц (загальна синхронiзацiя системи). Структурна схема системи збору iнформацiï має такий вигляд(рис. 2.1):  Рисунок 2.1 - Структурна схема системи збору iнформацiï Необхiдно провести синтез блоку мультиплексування (MUX). Стандартна мiкросхема К561КП2 представляє собою 8-канальний мультиплексор , призначений для переключення цифрових та аналогових сигналiв. Блок MUX повинен забезпечувати переключення двадцяти аналогових сигналiв . Для синтезу необхiдно використати 3 мiкросхеми К561КП2. Функцiональна схема блоку мультиплексування (MUX) представлена на рисунку 2.2: 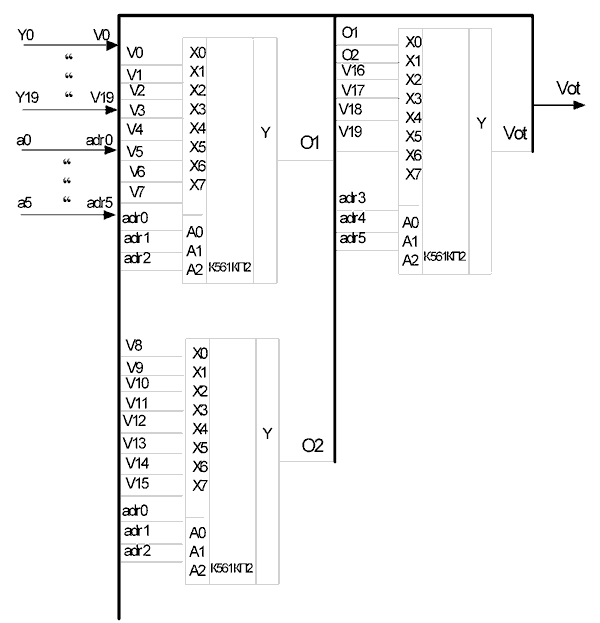 Рисунок 2.2 - Функцiональна схема блоку MUX Сигнали Y0 ... Y19 - це аналоговi сигнали, що надходять з датчикiв. Сигнали а0 ... а5 - це дискретнi сигнали, що є кодами адреси необхiдного аналогово cигналу. Сигнал Vot - це аналоговий сигнал, який було обрано для подальшоï обробки. В процесi роботи системи мiкроконтролер генерує код адреси необхiдного аналогово сигналу та через порт P1 передає цей код до блоку мультиплексування. Приведемо коди адресу, що вiдповiдають кожному з входiв (Табл 2.1): Таблиця 2.1.- Коди адресу аналогових входiв.  В кожнiй мiкросхемi К561КП2 присутнiй вхiд заборони( активний нижнiй рiвень). Так як в даному випадку в користуваннi цим входом немає потреби, то на нього подається логiчна одиниця - +5В. Для АЦП використаємо стандартну мiкросхему PHILIPS TDA8714M/6. Вiн представляє з себе 8-бiтний високошвидкiсний аналогово-цифровий перетворювач. Максимальна тактова частота мiкросхеми становить 60MГц. Внутрiшня будова прдставлена на рис.2.3:  Рисунок 2.3 - Внутрiшня будова мiкросхеми PHILIPS TDA8714M/6 Згiдно з довiдковими матерiалами входи та виходи повиннi пiд´єднуватись таким чином: D0 : D7 - дискретнi виходи, пiд´єднуються до порту мiкро контролера Р0 Проаналiзуємо цi данi та побудуємо схему пiдключення мiкросхеми TDA8714 (рис.2.4):  Рисунок 2.4 - Схема пiдключення TDA8714 Так як стандартний АЦП розрахований на дiапазон вхiдного аналогово сигналу вiд 0В до +7в, то необхiдним є розрахунок додатковоï ланки, яка б перетворювала аналоговий сигнал шляхом змiни його масштабу. Вхiдний аналоговий сигнал з датчика змiнюється в межах вiд 0 до +10В. Основним компонентом даноï ланки буде операцiйний пiдсилювач. Схема складається з двох частин, з´єднаних послiдовно. Кожна частина в загальному виглядi побудована так: 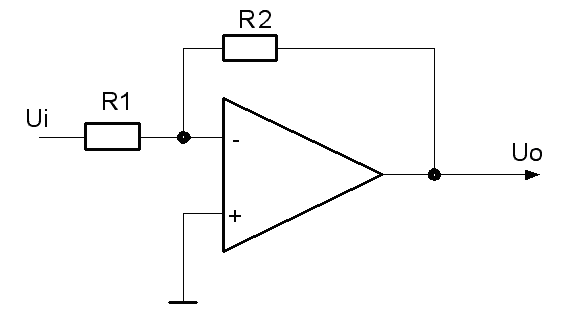 Рисунок 2.5 - Схема пiдключення Дана схема забезпечує таку залежнiсть: Uo= - Ui *(R2/R1); Розрахуємо параметри резисторiв для першоï ланки: Uo = -7В, Ui = 10В, Нехай R21 = 700Ом, R11 = 1000Ом. Друга ланка повинна лише змiнювати знак, отже нехай R22 = 700Ом, R12 = 700Ом. Структурна схема зображена на рисунку 2.6:  Рисунок 2.6 - Ланка масштабування Для синтезу схеми використаємо стандартний елемент AD712ACP( корпус DIP8). Його цокольовка зображена на рисунку 2.7:  Рисунок 2.7 - Цокольовка AD712ACP За таких умов буфернi елементи мiж робочою станцiєю та системою збору iнформацiï не потрiбнi, так як цикл передачi даних здiйснюється за допомогою унiверсального прийомо-передавача. Принципова схема системи збору iнформацiï наведена в графiчнiй частинi. 3. Розробка прошивки мiкроконтролера3.1 Розробка головноï процедуриНаступним етапом є розробка ПЗ системи збору iнформацiï. Головний алгоритм роботи системи збору iнформацiï має вигляд (рисунок 3.1.1):  Рисунок 3.1.1 - Головний алгоритм роботи системи збору iнформацiï Розглянемо кожний з блокiв алгоритму бiльш детально. В блоцi iнiцiалiзацiï ми задаємо режим роботи таймеру, заносимо до таймеру необхiдне число циклiв його роботи. Так як збiр даних повинен здiйснюватись кожнi 3 секунди, то цей перiод буде задаватись таким чином: Таймер мiкроконтролера в режимi 1 має розряднiсть 16 бiт, та працює, як лiчильник, що додає. Отже для забеспечення даного промiжку часу (Tsec) треба здiйснити 60 циклiв роботи таймера, до якого внести значення -5000010 = 3СВ0h; Кiлькiсть циклiв роботи таймера: За кiлькiсть циклiв таймера буде вiдповiдати комiрка оперативноï памятi з адресою 3F. Вершина "iнтервал" перевiряє кiлькiсть циклiв роботи таймера: Процедура "Збiр даних" дiє наступним чином: Процедура "Вiдправка даних" дiє наступним чином: Текст головноï програми буде таким:
0000 LJMP 0100 // Перехiд до коду програми
. .
. .
. .
000B MOV TH0, #3C // 000В-вектор преривання вiд таймера;
MOV TL0, #B0 // завантаження значення 3СВ0 та
SETB PSW.5 // взведення бiту вказiвки
RETI
. .
. .
. .
0100 MOV TH0, #3C // завантаження значення 3СВ0 до
MOV TL0, #B0 // таймера;
MOV TMOD, #01 // Вибор режиму таймера
MOV IE, #82 // настроювання регiстру преривань
MOV 3F, #3C // кiлькiсть циклiв таймера
SETB TCON.4 // пуск таймера
M0:
MOV A, 3F // перевiрка iнтервалу
CJNE A, #3C, M1
MOV 3F,#00
LCALL 0200 // Виклик процедури "Збiр даних"
LCALL 0300 // Виклик процедури "Вiдправка даних"
M1:
CLR PSW.5 // обнулення бiту вказiвки
BACK:
JNB PSW.5 , BACK // чекання закiнчення одного циклу таймера
INC 3F // нарощування кiлькостi циклiв таймера
SJMP M0 // перехiд до початку головного циклу
3.2 Розробка процедури опитуАлгоритм роботи процедури опиту датчикiв має вигляд(рисунок 3.2.1): 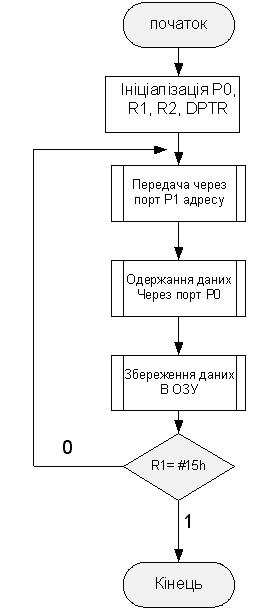 Рисунок 3.2.1 - Алгоритм роботи процедури опиту датчикiв Першим етапом є iнiцiалiзацiя: Далi здiйснюється цикл роботи, пiд час якого: Масив даних знаходиться в ОЗУ в комiрках з номерами вiд 40h до 54h включно. Таблиця адрес аналогових сигналiв знаходиться в пам´ятi починаючи з адреси 0160h. Вона мiстить такi значення : 0160h..... 00 01 02 03 04 05 06 07 0168h..... 08 09 0A 0B 0C 0D 0E 0F 0170h..... 10 18 20 28 Приведемо текст процедури:
0200 MOV P0, #FF
MOV R1, #00
MOV DPTR, #0160
MOV R2, #40
LABEL:
MOV A, R1
MOV A, @A+DPTR
MOV P1, A
SETB P1.7
MOV A, P0
CLR P1.7
MOV @R2, A
INC R2
INC R1
CJNE R1, #15, LABEL
RETI
3.3 Розробка процедури передачi данихАлгоритм роботи процедури передачi даних на робочу станцiю має вигляд (рисунок 3.3.1): 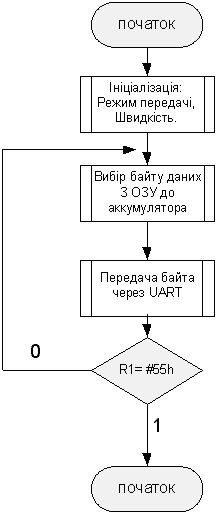 Рисунок 3.3.1 - Алгоритм роботи процедури передачi даних. Першим етапом є iнiцiалiзацiя: Пiд час передачi початком серiï служать 2 байта (Б1 та Б2): Пiсля того, як Б1 та Б2 було передано, органiзується цикл, пiд час роботи якого байт даних спочатку з ОЗУ копiюється до аккумулятора А, а потiм передається до буферного регiстру UART для подальшоï передачi на робочу станцiю. Пiсля закiнчення циклу керування передається головнiй програмi. Регiстр R3=40h // базова адреса масива даних в ОЗУ. Приведемо текст процедури:
0300 MOV SCON, #42
MOV TMOD, #20
MOV TH1, #F3
MOV R3, #40
SETB TCON.6
MOVX A, @R1
COUT:
JNB TI, COUT
CLR TI
MOV SBUF, A
INC R3
CJNE R3, #55, COUT
RETI
4. Розробка ПЗ представлення отриманих данихПiдсистема представлення отриманих даних(ПСП) є саме тiєю частиною, яка беспосередньо забеспечує взаємодiю всiєï системи з оператором. Вся необхiдна iнформацiя надходить вiд пiдсистеми збору iнформацiï(ПСЗi) та пiддається обробцi. Взаємозв´язок показано на рисунку 4.1: 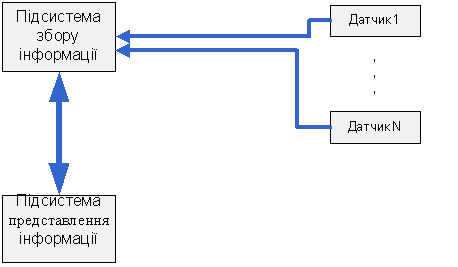 Рисунок 4.1 - Взаємозв´язок пiдсистем збору та представлення iнформацiï Мовою програмування, що буде використовуватись пiд час розробка пiдсистеми представлення отриманих даних, буде мова С. Це дозволяє надати програмi такi властивостi,як надiйнiсть, швидкодiя, легка переносимiсть на будь-якi операцiйнi системи та платформи. Цей пiдхiд вибрано також виходячи з економiчноï точки зору, бо в даному випадку таке програмне забезпечення суттєво знижує вартiсть робочого мiсця оператора в силу нижчих вимог до апаратноï частини. Задачами ПСП є: 4.1 Розробка алгоритму роботи програмного забезпеченняАлгоритм роботи програмного забезпечення пiдсистеми представлення отриманих даних повинен забеспечити виконання всiх вимог, поставленних до цiєï пiдсистеми. Програмне забеспечення представлення даних складається з двох частин: Алгоритм роботи головноï програми представлено на рисунку 4.1.1: 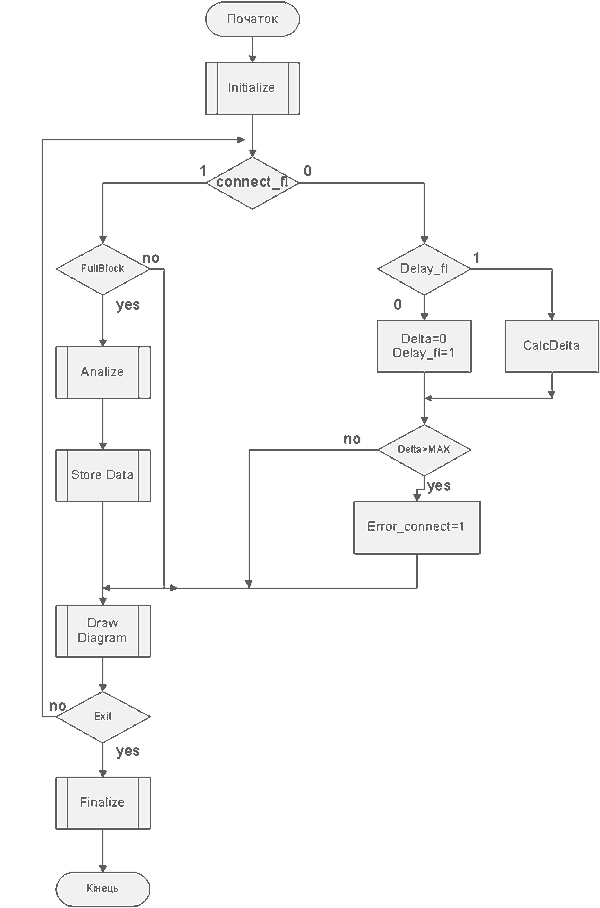 Рисунок 4.1.1 - Алгоритм роботи головноï програми. Розглянемо кожний з блокiв алгоритму бiльш детально. Пiсля старту роботи програми в блоцi "Initialize" вiдбувається iнiцiалiзацiя: Пiсля iнiцiалiзацiï починається головний цикл роботи. В ньому спочатку перевiряється наявнiсть зв´язку з пiдсистемою збору iнформацiï. Флаг "Connect" взводиться обробником переривання пiд час його виклику. Якщо пiд час даного проходу флаг не було взведено, то вiдбувається перевiрка флагу затримки. Затримка обчислюється як рiзниця мiж початковим значенням(отримуємо його якщо це перший холостий прохiд циклу - Delay_fl=0 ) та поточним значенням часу в тiках. Якщо затримка перевищує максимум(15 секунд = 270 тiкiв), то взводиться флаг вiдсутностi зв´язку з об´єктом "Erriconnect". За умови, що флаг "Connect" взведено, вiдбувається перевiрка: отримано останнiй байт в серiï чи нi. Якщо так, то вiдбувається аналiз отриманих даних по кожному з датчикiв, формується структура даних(мiстить дату, час отримання та блок даних) та записується до файлу. Потiм данi виводяться на екран оператора. Якщо нi, то переходимо до початку циклу. При завершеннi оботи програми вiдувається закриття файлу, вiдновлення попереднiх графiчних настройок та вiдновлення векторiв переривань. Обробник апаратного переривання забеспечує отримання iнформацiï вiд пiдсистеми збору даних. Алгоритм роботи обробника представлено на рисунку 4.1.2: 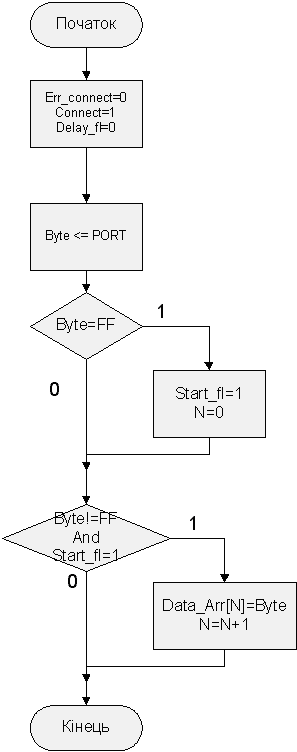 Рисунок 4.1.2 - Алгоритм роботи обробника. Пiд час виклику обробника вiдбувається змiна таких флагiв: Далi вiдбувається аналiз байта, що отримано. Байт, що мiстить значення 1111 11112, є признаком початку блока. Якщо було отримано такий байт, то взводиться флаг прийому серiï та покажчик буфера даних встановлюється на початок. Якщо було отримано байт з iним значенням, але флаг прийому серiï взведено, то цей байт заноситься до буферу. Якщо було отримано байт з iним значенням, але флаг прийому серiï не взведено, то oбробник завершує роботу. 4.2 Розробка структур данихПiдсистема збору iнформацiï побудована на основi мiкроконтроллера INTEL8051. З цього випливає, ця пiдсистема оперує виключно цiлими числами. Отже значення концентрацiï метана є цiлим числом. Для того щоб задовольнити вимогам завдання, потрiбно визначити, який саме формат даних необхiдно використовувати. Максимально допустима концентрацiя метану в шахтних виробках становить в середньому 1.3%. Якщо проводити вимiрювання з похибкою в 0.05% , а максимальним можливим значенням вважати 12.75% , то дiапазон цiлих чисел буде становити 255 значень. Щоб задовiльнити цi потреби, необхiдно:  Отже, необхiдно використовувати тип даних unsigned char. З цього випливає, що пiд час обмiну даними з пiдсистеми збору iнформацiï надходить 20+1 байтiв iнформацiï (рис. 4.2.1):  Рисунок 4.2.1 - Блок даних, що надходять В процесi обробки даних необхiдно створювати статистику, тобто зберiгати показники, що надiйшли ранiше. Для цього необхiдно створити базу даних для зберiгання iнформацiï. В цiй базi iнформацiя зберiгається у виглядi структур, кожна з которих повинна мiстити: Час та дата зберiгається у стандартному форматi, що використовується функцiями gettime та getdate:
struct date { Таким структура запису: Розмiр одного запису: M = 21 + (2+2*1)+ 4*1 = 29 байт Такий запис представлено на рис. 4.2.2:  Рисунок 4.2.2 - Структура запису idata Використаємо такi структури: 5. Аналiз результатiвВ результатi виконання технiчного завдання розроблено систему, що скадається з двох частин: апаратноï та програмноï. Апаратна частина забеспечує прийом аналогових сигналiв в дiапазонi вiд 0В до +10В, преобразує його у вiдповiдний дискретний 8-бiтний код та передає на робочу станцiю. Програмна частина - програмне забеспечення, що приймає пакет зiбраних даних, аналiзує його, помiщає його до файлу бази даних, доповнивши його значенням часу та дати одержання цього пакету. Пакети, якi не вiдповiдають вимогам встановленого з´єднання, до бази даних не заносяться. Програма працює в режимi очiкування надходження даних, так як iнтервал опросу датчикiв, процес перетворення сигналiв та процес преедачi iнформацiï цiлком контролюється апаратними засобами - мiкроконтролером. Мiкроконтролер передає iнформацiю блоками по 21 байт. Пiд час передачi кожного байта iнформацiï перед ним передається бiт старту, а за ним - бiт завершення. Кожен блок передається з iнтервалом в 3с. ПЗ представлення даних пiсля етапiв отримання, аналiзу та зберiгання блоку iнформацiï вiдображає ïï графiчно на екранi оператора. Залежно вiд визначенних факторiв, можливi три рiзних випадки. В першому випадку iнформацiя надходить так , як потрiбно - з iнтервалом в три секунди, та концентрацiя метану не перевищує норми в 1,3%. При цьому на екранi оператора буде вiдображено(Рисунок 5.1):  Рисунок 5.1 - Екран оператора (робота у нормальному режимi). Кожен з двадцяти стовбчикiв вiдображає показання датчикiв у даний момент часу(номер датчика - знизу, пiдпис над стовбчиком -поточне значення концентрацiï в пунктах,один пункт дорiвнює 0,05%). У другому випадку, якщо iнформацiя надходить так , як потрiбно - з iнтервалом в три секунди, але на деяких датчиках концентрацiя метану перевищує норму в 1,3%, то на екранi оператора буде вiдображено(Рисунок 5.2):  Рисунок 5.2 - Екран оператора (Концентрацiя метану є небеспечною). В третьому випадку,якщо iнформацiя не надходить впродовж п´яти сеансiв передачi даних(п´ятнадцять секунд), то на екран оператора поточнi значеня не виводяться.Повiдомлення статусу роботи системи буде таким (Рисунок 5.3):  Рисунок 5.3 - Екран оператора (данi не надходять).
|
||