А.С. Холодов, А.И. Лобанов, А.В. Евдокимов
РАЗНОСТНЫЕ СХЕМЫ ДЛЯ РЕШЕНИЯ ЖЕСТКИХ ОБЫКНОВЕННЫХ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ
В ПРОСТРАНСТВЕ
НЕОПРЕДЕЛЕННЫХ КОЭФФИЦИЕНТОВ
Предисловие
Данная книга написана на основе конспекта односеместрового курса лекций, под несколько иным названием читаемого на факультетах управления и прикладной математики (ФУПМ) и аэрофизики и космических исследований (ФАКИ) Московского физико-технического института (на ФУПМ с 1985 года). Лекции поддерживаются лабораторным практикумом из 8 работ по соответствующим разделам курса. В общем “вычислительном” образовании студентов ФУПМ эти лекции стоят между вводным курсом вычислительной математики (в объеме книг [1,2]) и фундаментальным курсом теории разностных схем (в объеме книги [3]). Это обстоятельство, а также естественное желание возможно большего охвата идей и конкретных разностных схем из всего огромного числа разработанных к настоящему времени, определило содержание и характер изложения материала данного курса.
В качестве основного подхода к построению разностных схем для простейших (модельных) уравнений принят известный метод неопределенных коэффициентов (позволяющий рассматривать достаточно обширные семейства схем), дополненный анализом этих семейств в пространстве неопределенных коэффициентов. Анализ разностных схем в пространстве коэффициентов (предложенный в [4]) оказался достаточно универсальным и весьма конструктивным средством не только для качественного сравнения различных схем (типа: устойчива – неустойчива, монотонна – немонотонна, первого – второго порядка аппроксимации и т.п.) но, в определенном смысле, и количественного их сопоставления (например, в смысле “расстояния” между схемами в пространстве неопределенных коэффициентов, если принять достаточно естественную гипотезу о том, что близкие в таком пространстве схемы близки и по своим свойствам).
Поскольку курс в целом ориентирован на методы решения нелинейных дифференциальных уравнений, характерной чертой которых являются разрывные решения, области больших градиентов (“пограничные слои”) и т.п., достаточно большое внимание уделено построению монотонных (мажорантных) схем. При переходе от модельных уравнений к линейным системам и нелинейным уравнениям в курсе активно используются характеристические свойства уравнений гиперболического типа и аналогичные методы расщепления для других типов уравнений, интегро-интерполяционный метод (метод интегрального тождества) и другие эффективные способы обобщения схем с сохранением заложенных в модельные схемы свойств.
• Численное интегрирование жестких систем обыкновенных дифференциальных уравнений (ОДУ)
• Жесткие ОДУ
• Линейные однородные уравнения первого порядка
Рассмотрим вначале простейшее уравнение
![]() (1)
(1)
на отрезке
![]() (2)
(2)
и задачу Коши для (1)
u(0) = u 0 (3)
Решение (1)-(3), очевидно,
![]() (4)
(4)
Если ![]() , имеем неограниченное (неустойчивое) решение (рис. 1 .1).
, имеем неограниченное (неустойчивое) решение (рис. 1 .1).
|
||
Рис. 1 .1. |
Рис. 1 .2. |
Рис. 1 .3. |

В этом случае нет ничего, что могло бы в аналогичных, но более сложных случаях (нелинейные системы) облегчить жизнь вычислителю. Надо интегрировать (1) с шагом по времени, обеспечивающим необходимую точность до тех пор, пока это возможно. Если ![]() , то решение задачи (1)-(3) ограниченное (
, то решение задачи (1)-(3) ограниченное ( ![]() ). С точки зрения вычислителя важна величина отрезка интегрирования T . Если
). С точки зрения вычислителя важна величина отрезка интегрирования T . Если ![]() , то имеем обычную ситуацию (рис. 1 .2), можно пользоваться стандартными методами численного интегрирования (Эйлера, Эйлера–Коши, Рунге–Кутты, Адамса и т.д.). Если
, то имеем обычную ситуацию (рис. 1 .2), можно пользоваться стандартными методами численного интегрирования (Эйлера, Эйлера–Коши, Рунге–Кутты, Адамса и т.д.). Если ![]() , то имеем решение типа “пограничного слоя” (рис. 1 .3) с резким изменением u на малом (в масштабе T ) отрезке [0,T 0 ] . В аналогичных, но более сложных ситуациях (когда положение “пограничного слоя” заранее неизвестно и т.д.) при численном интегрировании возникают осложнения, которые и будут рассмотрены позднее. Основная идея заключается в том, чтобы численный метод обеспечивал качественно правильное поведение численного решения на участке “пограничного слоя” (при
, то имеем решение типа “пограничного слоя” (рис. 1 .3) с резким изменением u на малом (в масштабе T ) отрезке [0,T 0 ] . В аналогичных, но более сложных ситуациях (когда положение “пограничного слоя” заранее неизвестно и т.д.) при численном интегрировании возникают осложнения, которые и будут рассмотрены позднее. Основная идея заключается в том, чтобы численный метод обеспечивал качественно правильное поведение численного решения на участке “пограничного слоя” (при ![]() ), т.е. быстрое затухание, и возможно точнее воспроизводил решение на основном участке интегрирования
), т.е. быстрое затухание, и возможно точнее воспроизводил решение на основном участке интегрирования ![]() (вне “пограничного слоя”).
(вне “пограничного слоя”).
• Системы линейных однородных уравнений
Пусть имеется J уравнений (1)
![]() j = 1,…,J (5)
j = 1,…,J (5)
с начальными условиями ![]() .
.
Если обозначить
 ,
,
и перейти к векторной форме
![]() , (6)
, (6)
то, сделав замену ![]() , где
, где
 ,
,
т.е. полагая ![]() , получим вместо (6) однородную линейную систему ОДУ
, получим вместо (6) однородную линейную систему ОДУ
![]() . (7)
. (7)
Так как ![]() , то
, то ![]() или
или ![]() .
.
Наоборот, если задана система (7), то умножая ее скалярно J раз на левые собственные векторы ![]() матрицы A , определяемые, как это следует из (7), с точностью до их длины, из J линейных однородных систем
матрицы A , определяемые, как это следует из (7), с точностью до их длины, из J линейных однородных систем
![]() или
или ![]() (8)
(8)
приходим к эквивалентной (7) совокупности уравнений (5), связанных друг с другом только через начальные условия
v(0) = v 0 или ![]() . (9)
. (9)
Здесь ![]() – собственные значения матрицы A , т.е. корни характеристического уравнения
– собственные значения матрицы A , т.е. корни характеристического уравнения
![]() , (10)
, (10)
![]() – многочлен степени J .
– многочлен степени J .
Решение каждого из уравнений (5) имеет вид (4), т.е. ![]() , а значит, решение задачи Коши (7),(9) есть
, а значит, решение задачи Коши (7),(9) есть  , т.е. является линейной комбинацией экспонент (если все
, т.е. является линейной комбинацией экспонент (если все ![]() действительны) или имеет более сложный характер с присутствием гармонических составляющих (если среди
действительны) или имеет более сложный характер с присутствием гармонических составляющих (если среди ![]() будут комплексно-сопряженные корни уравнения (10)).
будут комплексно-сопряженные корни уравнения (10)).
• Пример: задача Коши для линейного однородного уравнения второго порядка
![]() ,
, ![]() ,
, ![]()
( ![]() , a, b – константы). Обозначим
, a, b – константы). Обозначим ![]() и введем вектор
и введем вектор ![]() , тогда
, тогда
![]() ,
,
![]()
или, в векторной форме,
![]() ,
,  ,
,
где ![]() – собственные значения матрицы A из (10):
– собственные значения матрицы A из (10):
![]()
![]() ,
,
![]() .
.
При |a|~|b|~1 , ![]() приближенно имеем
приближенно имеем ![]() ,
, ![]() ;
; ![]() ,
, ![]() . Далее, из (8)
. Далее, из (8)
 ,
,  ,
,
![]() при
при ![]() .
.
Тогда, учитывая, что ![]() , получаем:
, получаем:
 ,
,
![]() .
.
Если ![]() оба действительны, то имеем комбинацию двух экспонент, затухающих при ? 1 <0 и ? 2 <0. Если ? 1 = ? + i ? , ? 2 = ? – i ? , то u ( t ) = e ?t {[( u 1 – ?u 0 ) sin ( ?t )]/ ? + u 0 cos ( ?t )} , и на экспоненту e ?t накладываются гармонические колебания с периодом T * ~1/ ? , т.е. характер поведения решения определяется собственными значениями матрицы A .
оба действительны, то имеем комбинацию двух экспонент, затухающих при ? 1 <0 и ? 2 <0. Если ? 1 = ? + i ? , ? 2 = ? – i ? , то u ( t ) = e ?t {[( u 1 – ?u 0 ) sin ( ?t )]/ ? + u 0 cos ( ?t )} , и на экспоненту e ?t накладываются гармонические колебания с периодом T * ~1/ ? , т.е. характер поведения решения определяется собственными значениями матрицы A .
В общем случае можно выделить следующие четыре характерных ситуации:
|
|
А |
Б |
|
|
В |
Г |
Рис. 1 .4. Виды спектров матриц систем ОДУ |
|
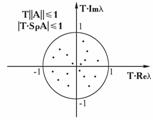



Случай А не доставляет вычислителю никаких хлопот, проходят стандартные методы (явные схемы Рунге–Кутты, Адамса т.п.), уже изучавшиеся в курсе вычислительной математики.
Случай Б практически безнадежен (неустойчивые по Ляпунову системы ОДУ).
Случай В довольно часто встречается на практике и для него, в принципе, есть специальные методы, основанные на осреднении быстроосциллирующих гармоник (методы осреднения и т.п.).
Случай Г мы и будем рассматривать (жесткие системы ОДУ). Для матрицы A большой размерности найти все собственные числа ![]() (полная спектральная задача) не очень просто из-за ее плохой обусловленности. Действительно, для жесткой системы число обусловленности матрицы A
(полная спектральная задача) не очень просто из-за ее плохой обусловленности. Действительно, для жесткой системы число обусловленности матрицы A
![]() (11)
(11)
или, приближенно, || A ||Т >>1, и отсюда идут все неприятности. Здесь и в дальнейшем || · || – норма матрицы.
• Нелинейные жесткие уравнения
Рассмотрим одно сингулярно возмущенное уравнение ![]() ,
, ![]() ,
,
![]() ,
, ![]() ,
, ![]() (12)
(12)
В случае если предельное (вырожденное) уравнение (12) при ![]()
![]()
при каждом значении t имеет единственное решение
![]() , (13)
, (13)
и в окрестности этого предельного решения ![]() ,
, ![]() (условие устойчивости решений (12)), имеем ситуацию, изображенную на рис. 1 .5. Аналогичная ситуация была и в примере 1.1.3 при малых
(условие устойчивости решений (12)), имеем ситуацию, изображенную на рис. 1 .5. Аналогичная ситуация была и в примере 1.1.3 при малых ![]() (в том случае предельное уравнение было
(в том случае предельное уравнение было ![]() ). Как и в линейном случае, поведение решения разделяется на два характерных участка: пограничный слой для малых
). Как и в линейном случае, поведение решения разделяется на два характерных участка: пограничный слой для малых ![]() (его длина
(его длина ![]() ), и близкое к предельному решению (13) поведение при
), и близкое к предельному решению (13) поведение при ![]() . Обычно определяемый “физикой задачи” участок интегрирования
. Обычно определяемый “физикой задачи” участок интегрирования ![]() .
.
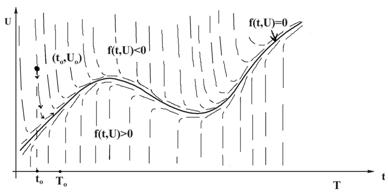
Рис. 1 .5. Поле решений уравнения (12)
• Пример: сингулярно возмущенная нелинейная система второго порядка
Рассмотрим следующую автономную (правая часть не зависит от времени) систему двух нелинейных уравнений:
![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
,
![]() ,
, ![]() . (14)
. (14)
Убедимся, что система жесткая. Записав (14) в векторной форме u={x,y} , ![]() ,
,  , имеем:
, имеем:
 или
или
![]() .
.
Если ![]() мало, то
мало, то ![]() ,
, ![]() . Видно, что
. Видно, что ![]() ,
, ![]() при
при ![]() , поэтому ? 2 называют нормальной частью спектра, а ? 1 – жесткой частью спектра.
, поэтому ? 2 называют нормальной частью спектра, а ? 1 – жесткой частью спектра.
Предельное уравнение:
![]() или
или ![]() ,
,
![]() ,
, ![]() . (15)
. (15)
В случае уравнения Ван дер Поля
![]() ;
; ![]() (16)
(16)
(которое важно во многих приложениях, например, в радиотехнике), получаем предельное уравнение ![]() и поле решений в фазовой плоскости, изображённое на рис. 1 .6.
и поле решений в фазовой плоскости, изображённое на рис. 1 .6.
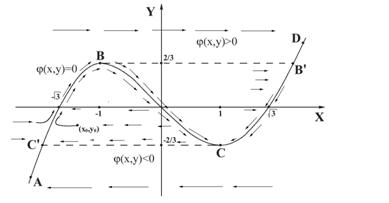
Рис. 1 .6. Поле решений уравнения Ван дер Поля
Вдали от линии ![]() имеем почти горизонтальное поле направлений
имеем почти горизонтальное поле направлений ![]() , на самой линии выделяются две устойчивые ветви AB и CD и одна неустойчивая ветвь BC . При любых начальных значениях
, на самой линии выделяются две устойчивые ветви AB и CD и одна неустойчивая ветвь BC . При любых начальных значениях ![]() траектория этой системы – замкнутая кривая BB?CC? .
траектория этой системы – замкнутая кривая BB?CC? .
1) На участке ![]() траектория почти горизонтальна и приближенно определяется уравнениями:
траектория почти горизонтальна и приближенно определяется уравнениями:
![]() ,
, ![]() ,
, ![]() (17)
(17)
(пограничный слой).
2) При ![]() и система описывается предельными уравнениями (16) (квазистационарный режим вплоть до точки B ). Если и после т. B пользоваться предельными уравнениями (16), то мы бы двигались по BC . Но реальная система на этом участке неустойчива и система сходит с этой ветви на ветвь DB?C . На этом участке
и система описывается предельными уравнениями (16) (квазистационарный режим вплоть до точки B ). Если и после т. B пользоваться предельными уравнениями (16), то мы бы двигались по BC . Но реальная система на этом участке неустойчива и система сходит с этой ветви на ветвь DB?C . На этом участке ![]() и решение определяется поведением
и решение определяется поведением ![]() .
.
3) Опять пограничный слой (17) при ![]() , за ним квазистационарное движение на участке B?C при
, за ним квазистационарное движение на участке B?C при ![]() , пограничный слой и т.д. (все повторяется).
, пограничный слой и т.д. (все повторяется).
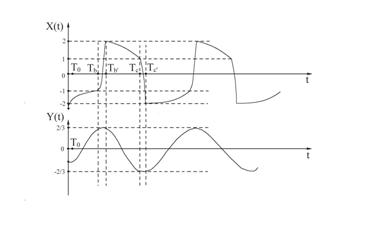
Рис. 1 .7. Компоненты решения уравнения
Ван дер Поля в зависимости от времени.
• Произвольная система нелинейных уравнений
В случае задачи Коши для общей системы нелинейных уравнений
![]() ,
, ![]() ,
, ![]() ,
,
 , (18)
, (18)
поведение ее решения вблизи некоторой точки ![]() определяется матрицей Якоби A .
определяется матрицей Якоби A .
Определение 1 . 1 . Система называется жесткой, если для всех t,v (т.е. на решениях (18)), собственные значения матрицы A удовлетворяют условиям:
![]() ,
, ![]() ,
,
![]() ,
, ![]() .
.
(т.е. расположены как на рис. 1 .4Г). Для оценки ![]() можно взять легко вычисляемую величину нормы матрицы A , для оценки
можно взять легко вычисляемую величину нормы матрицы A , для оценки ![]() – величину следа матрицы
– величину следа матрицы ![]() ;
; ![]() можно заменить на величину 1/Т, определяемую обычно из физики задачи. То есть простейшим критерием жесткости системы могут служить неравенства Т || A ||>>1, Sр( A )<<–1 (иногда ограничиваются даже одним условием (11)), однако надежных простых способов нет, и поэтому нужны численные методы, работающие без проверок на жесткость.
можно заменить на величину 1/Т, определяемую обычно из физики задачи. То есть простейшим критерием жесткости системы могут служить неравенства Т || A ||>>1, Sр( A )<<–1 (иногда ограничиваются даже одним условием (11)), однако надежных простых способов нет, и поэтому нужны численные методы, работающие без проверок на жесткость.
• Примеры простейших разностных схем для жестких ОДУ
• Способы построения схем
При численном решении задачи (18) с помощью разностных схем в некоторой последовательности точек ![]() вычисляются значения
вычисляются значения ![]() . Способов вычисления (разностных схем) изобретено множество, однако, не очень сильно отличаясь по качеству получаемого численного решения в стандартном случае (рис. 1 .4А), далеко не все из них пригодны для расчета жестких систем ОДУ (рис. 1 .4Г). В идейном плане можно выделить три основных подхода к их построению.
. Способов вычисления (разностных схем) изобретено множество, однако, не очень сильно отличаясь по качеству получаемого численного решения в стандартном случае (рис. 1 .4А), далеко не все из них пригодны для расчета жестких систем ОДУ (рис. 1 .4Г). В идейном плане можно выделить три основных подхода к их построению.
 (19)
(19)
Вводя расширенный искомый вектор u={v,w}, получаем для него уравнение
u t = B(t,v)u + r(t,v) , где
![]()
( r = 0, если f явно не зависит от t , т.е. в случае автономной системы). Увеличивая размерность u (т.е. вычисляя в точках t= t n не только v , v t = f , но и ![]() и т.д.), этот процесс можно продолжить (конечно, если f задается аналитически и соответствующие производные от f не очень громоздки).
и т.д.), этот процесс можно продолжить (конечно, если f задается аналитически и соответствующие производные от f не очень громоздки).
• Всевозможные гибриды из 1 , 2 , 3 и ряд других подходов.
• Требования к численным методам решения жёстких систем ОДУ
Каким же условиям должны удовлетворять разностные схемы для решения жестких систем? Разберем на примере системы (14) два простейших метода – явный и неявный методы ломаных, называемые также схемами Эйлера.
На участке пограничного слоя (его протяженность ![]() ) для воспроизведения решения пригоден практически любой обеспечивающий необходимую точность численный метод с шагом
) для воспроизведения решения пригоден практически любой обеспечивающий необходимую точность численный метод с шагом ![]() . Например, даже для явной схемы Эйлера в линейном случае (7)
. Например, даже для явной схемы Эйлера в линейном случае (7)
![]()
имеем из условия устойчивости ![]() . Для примера (14),(16) (уравнение Ван дер Поля)
. Для примера (14),(16) (уравнение Ван дер Поля) ![]() , что не является здесь обременительным. Общее число шагов по времени
, что не является здесь обременительным. Общее число шагов по времени ![]() ~10?100 тоже вполне приемлемо. Однако это ограничение на шаг интегрирования
~10?100 тоже вполне приемлемо. Однако это ограничение на шаг интегрирования ![]() действует и на участках квазистационарного решения (С?B, B?C) и для прохождения таких участков потребуется уже
действует и на участках квазистационарного решения (С?B, B?C) и для прохождения таких участков потребуется уже ![]() шагов! А это уже неприемлемо при очень малых
шагов! А это уже неприемлемо при очень малых ![]() . Возможный выход – переход к решению предельной системы (15), в которой уже
. Возможный выход – переход к решению предельной системы (15), в которой уже ![]() не фигурирует, а условие устойчивости (конечно, линеаризованное, т.е. действующее в небольшой окрестности кривой C?BB?CC?)
не фигурирует, а условие устойчивости (конечно, линеаризованное, т.е. действующее в небольшой окрестности кривой C?BB?CC?) ![]() или
или ![]() вполне приемлемо.
вполне приемлемо.
При численном решении на участках С?B и BС? полной системы (14), (16) хорошо работает неявный метод Эйлера
![]()
Для решения получающейся на каждом шаге по t нелинейной относительно v n+1 системы
![]()
используется какой-либо итерационный метод (например, метод Ньютона).
В случае линейной системы (7) в неявном методе Эйлера
![]() (20)
(20)
условие устойчивости ![]() выполняется для любых
выполняется для любых ![]() при
при ![]() . Поэтому при использовании метода (20) для задачи (14),(16) на участках С?B, BС? нет проблем, исключая, конечно, тот факт, что матрица A плохо обусловлена для жестких систем и при обращении матрицы ( E –
. Поэтому при использовании метода (20) для задачи (14),(16) на участках С?B, BС? нет проблем, исключая, конечно, тот факт, что матрица A плохо обусловлена для жестких систем и при обращении матрицы ( E – ![]() A ) могут возникнуть трудности при больших
A ) могут возникнуть трудности при больших ![]() . Проведённый анализ показывает, (да и просто по графику x(t) на рис. 1 .7 видно), что шаг интегрирования
. Проведённый анализ показывает, (да и просто по графику x(t) на рис. 1 .7 видно), что шаг интегрирования ![]() на разных участках следует выбирать разным , и численный метод должен позволять это делать достаточно просто. Это первая характерная особенность жестких систем. То есть надо уметь предсказывать момент появления пограничных слоев, а это определяется собственными значениями матрицы Якоби. Отметим также, что в неявном методе Эйлера для системы (14)
на разных участках следует выбирать разным , и численный метод должен позволять это делать достаточно просто. Это первая характерная особенность жестких систем. То есть надо уметь предсказывать момент появления пограничных слоев, а это определяется собственными значениями матрицы Якоби. Отметим также, что в неявном методе Эйлера для системы (14)
![]() ,
,
![]() ,
,
т.е. приближенно мы как бы решаем предельную систему (15), так как ![]() .
.
Менять шаг интегрирования ![]() в процессе счета можно, но далеко не всегда нас интересует детальное поведение решения в пределах пограничного слоя. В таких случаях можно брать
в процессе счета можно, но далеко не всегда нас интересует детальное поведение решения в пределах пограничного слоя. В таких случаях можно брать ![]() и по неявной схеме проходить пограничный слой за один шаг по времени.
и по неявной схеме проходить пограничный слой за один шаг по времени.
Посмотрим еще, что будет происходить в неявной схеме вблизи точки B (или С) на примере уравнения Ван дер Поля (14), (16). Имеем:
![]()
 ,
,
![]() .
.
Вблизи точки B с координатами {x n ,y n } имеем
 , т.е. кубическое относительно искомого x n+1 уравнение, решения которого изображены на рис. 1 .8.
, т.е. кубическое относительно искомого x n+1 уравнение, решения которого изображены на рис. 1 .8.
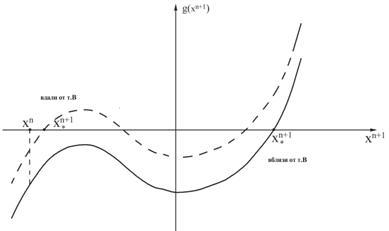
Рис. 1 .8. К алгоритму расчёта уравнения Ван дер Поля по неявной схеме Эйлера
Выбор в итерационном методе в качестве начального приближения {x n ,y n } при решении этого кубического уравнения может не дать сходимости. Это следствие вырождения исходной системы (14), и за этим надо следить (варьируя ![]() и т.п.). Например, задается некоторая точность сходимости итерационного процесса и минимально ( m ) и максимально ( M ) допустимые числа итераций. Если за M итераций процесс не сходится,
и т.п.). Например, задается некоторая точность сходимости итерационного процесса и минимально ( m ) и максимально ( M ) допустимые числа итераций. Если за M итераций процесс не сходится, ![]() уменьшают, если сходится за меньшее, чем m число итераций, то
уменьшают, если сходится за меньшее, чем m число итераций, то ![]() увеличивают и т.д.
увеличивают и т.д.