Обзор систем экстремального регулирования
1.Шаговые системы экстремального регулирования.
Использование шаговых экстремальных регуляторов дает возможность улучшить динамические особенности систем регулирования. Подбирая определенным образом период регулирования и длительность импульсов, можно снизить к минимуму амплитуду автоколебаний системы около экстремума при значительной инерционности объекта регулирования. В шаговых системах легко достигается пропорциональность управления.
Структурная схема простейшего регулятора шагового типа приведена на рис.1.
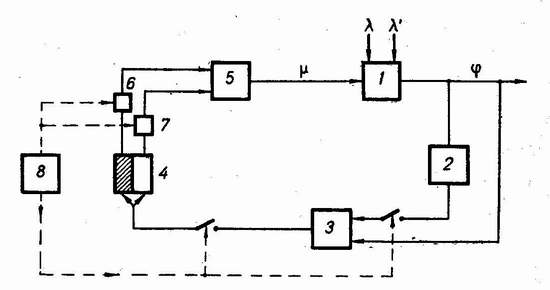
Рисунок 1 - Структурная схема шаговой системы
Здесь:
1 - объект (экстремальная статическая характеристика);
2 - запоминающее устройство;
3 - устройство сравнения;
4 - триггер;
5 - исполнительный элемент;
6 и 7 - логическое устройство типа "И";
8 - генератор импульсов.
Характерной особенностью шаговой системы является внешний генератор импульсов, который периодически включает цепь регулирования исполнительного элемента. Устройство сравнения 3 в момент каждого импульса сравнивает два значения регулируемой величины Rn и Rn-1, которые отвечают во времени значениям n и n-1 периода регулирования. Период регулирования равен промежутку времени между двумя последовательными импульсами.
Триггер изменяет свое положение, если
 ,
,
где  - порог срабатывания триггера. Поэтому в приведенной схеме триггер выполняет роль логичного устройства, которое учитывает знак предыдущего значения управляющего воздействия.
- порог срабатывания триггера. Поэтому в приведенной схеме триггер выполняет роль логичного устройства, которое учитывает знак предыдущего значения управляющего воздействия.
Исполнительный элемент управляется от триггера в моменты срабатывания генератора импульсов, причем направление движения исполнительного элемента зависит от состояния триггера.
Учитывая обязательную зону нечувствительности регулятора, закон регулирования приведенной системы можно записать в виде:
если 
если 
где  =const - длительность импульсов;
=const - длительность импульсов;
=const - длительность импульсов;
Т - период регулирования;
Rn и Rn-1- значения регулируемой величины на n и n-1 периоде;
u - напряжение, которое подается на исполнительный элемент;
a0- постоянная величина.
2. Дифференциальная система, использующая принцип смещения экстремальных характеристик.
Основной особенностью рассматриваемой системы является то, что при помощи линейного преобразователя, который использует принцип смещения экстремальных характеристик, экстремальная система превращается в линейную следящую систему.
На практике часто встречаются объекты управления, нелинейная часть которых сравнительно просто поддается моделированию. Примером этого может быть множество объектов химической промышленности. В этих объектах с основного резервуара легко отбирать небольшие пробы в специальные пробники (или датчики), и на основе этих проб создавать модели.
На рис. 2а приведена структурная схема такой системы. Управляющие и возмущающие воздействия в этой системе действуют не только на объект управления, но и на две модели. Кроме этого, на эти модели действуют одинаковые и постоянные по модулю, но разные по знаку дополнительные управляющие воздействия, под действием которых статические экстремальные характеристики моделей смещаются относительно характеристики объекта в одной модели вправо, в другой - влево (рис. 2б).
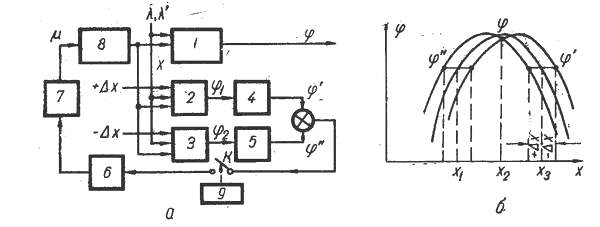
Рисунок 2 - Дифференциальная система с моделями
Здесь:
а - структурная схема:
1 - нелинейная безынерционная часть объекта;
2, 3 - модели объекта;
4-6 - усилитель;
7 - исполнительный элемент;
8 - линейная инерционная часть объекта;
9 - генератор импульсов (при рассмотрении непрерывной системы ключ К должен быть замкнутым);
б - график статических характеристик системы.
Рассмотрим этот процесс детальнее. Допустим, что на вход обеих моделей и на объект регулирования подается управляющее воздействие х1. Тогда выходная величина первой модели, которая соответствует  , будет равна
, будет равна  , а выходная величина второй модели, которая соответствует
, а выходная величина второй модели, которая соответствует  , будет равна
, будет равна  . Такие же рассуждения можно привести и для случая, когда на вход моделей и объекта регулирования подается управляющее воздействие x3.
. Такие же рассуждения можно привести и для случая, когда на вход моделей и объекта регулирования подается управляющее воздействие x3.
, а выходная величина второй модели, которая соответствует , будет равна . Такие же рассуждения можно привести и для случая, когда на вход моделей и объекта регулирования подается управляющее воздействие x3.
Таким образом, рассмотрев несколько значений управляющего воздействия, можно убедиться в том, что статические экстремальные характеристики моделей смещены относительно действительной характеристики объекта регулирования. Поскольку на модели влияют все те воздействия, которые действуют на объект, то при перемещении характеристики объекта характеристики моделей будут перемещаться, не меняя положения как относительно характеристики объекта, так и относительно одна другой.
Датчики, установленные на каждой модели, измеряют показатели экстремума  и
и  . Показания датчиков подаются на устройство сравнения дифференциального регулятора, а результат сравнения - на усилитель. Дифференциальный регулятор поддерживает равенство
. Показания датчиков подаются на устройство сравнения дифференциального регулятора, а результат сравнения - на усилитель. Дифференциальный регулятор поддерживает равенство  . Это равенство выполняется только при значении управляющего воздействия x2, которое соответствует экстремуму реальной характеристики объекта регулирования.
. Это равенство выполняется только при значении управляющего воздействия x2, которое соответствует экстремуму реальной характеристики объекта регулирования.
и . Показания датчиков подаются на устройство сравнения дифференциального регулятора, а результат сравнения - на усилитель. Дифференциальный регулятор поддерживает равенство . Это равенство выполняется только при значении управляющего воздействия x2, которое соответствует экстремуму реальной характеристики объекта регулирования.
Таким образом, управляющее воздействие в рассматриваемой системе формируется в зависимости от величины и знака разницы показателей качества моделей и удерживает систему в точке пересечения их характеристик, тем самым поддерживая показатель качества объекта в экстремуме. В данном случае поиск в области времени переносится в область пространства, то есть определяются сразу две точки экстремальной характеристики.
На практике роль нелинейной части объекта в системе экстремального регулирования выполняют датчики. Это происходит в том случае, когда экстремальное показание датчика соответствует оптимальному прохождению регулируемого процесса. Тогда для смещения экстремальной характеристики достаточно на вход датчика подать постоянную во времени величину  .
.
.
Уравнения динамики системы, приведенной на рис. 5а, имеют следующий вид:
безынерционная часть объекта регулирования

первая модель

вторая модель

усилитель и серводвигатель

инерционная часть объекта регулирования

закон регулирования
Подставляя в закон регулирования значения и , получим

и , получим
В правильно настроенной схеме коэффициенты усиления ß1 и ß2 равны между собой, то есть ß1=ß2=ß. При этом условии закон регулирования примет вид:
Таким образом, рассматриваемая система является единственной из всех известных экстремальных систем без связи с возмущением  , в которой при правильной настройке параметров управляющее воздействие зависит только от ошибки системы. Система абсолютно инвариантна (нечувствительна) к возмущению (то есть к помехе). Изменением можно изменять коэффициент усиления системы
, в которой при правильной настройке параметров управляющее воздействие зависит только от ошибки системы. Система абсолютно инвариантна (нечувствительна) к возмущению (то есть к помехе). Изменением можно изменять коэффициент усиления системы
(то есть к помехе). Изменением можно изменять коэффициент усиления системы